在谈EPSON陀螺仪之前,先让我们了解一下陀螺仪的原理和历史。
早 期的陀螺仪是一种机械装置,主要部分是一个对旋转轴以极高角速度旋转的转子,转子装在一支架内;在通过转子中心轴XX1上加一内环架,那么陀螺仪就可环绕 平面两轴作自由运动;然后,在内环架外加上一外环架;这个陀螺仪有两个平衡环,可以环绕平面三轴作自由运动,就是一个完整的陀螺仪。
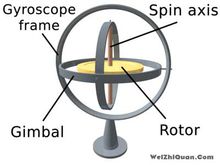
图1:陀螺仪结构图
在 现在常见的智能手机、游戏手柄等设备里面的是微机械陀螺仪(MEMS陀螺仪),MEMS陀螺仪利用科里奥利力—旋转物体在有径向运动时所受到的切向力。通 过给径向上的电容板加震荡启动电压使物体做径向运动,横向的科里奥利力运动带来的电容变化,因为科里奥利力正比于角速度,所以测量电容的变化可以计算出角 速度。
图2:科里奥利力
EPOSN陀螺仪采用了QMEMS陀螺仪,即石英晶体(QUARTZ)+微机械(MEMS)陀螺仪。所谓QMEMS是指那些对石英原料使用精密加工(光刻)技术,集结了机械、电子、光学、化学等相关的各种功能,具备高精度、高稳定性等附加价值的晶体元器件。
以EPSON XV4001的两轴为例,如图所示:
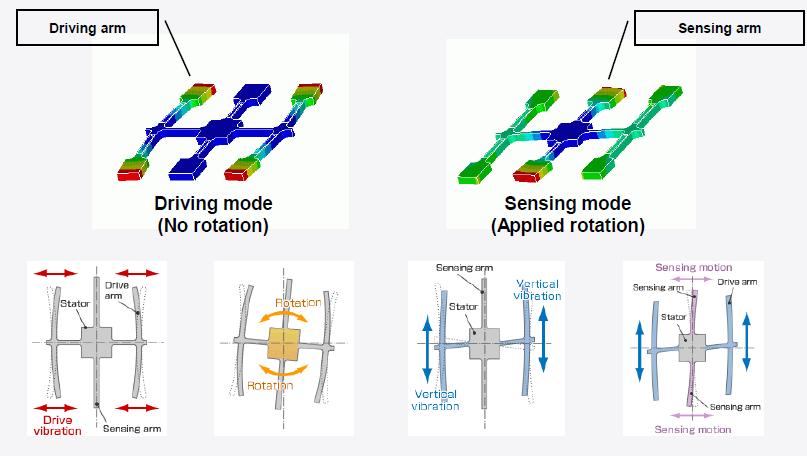
图3:EPSON XV4001
通 过切割时石英晶体为H,两侧为振动臂,中心为零位输出,该构造可使陀螺仪两侧振动臂相对照进行振动,再由检测臂准确检测承载的物体是否存在振动或转动。当 角速度传感器相对稳定没有旋转时,两侧振动臂相对于中心的数据作为参考值,当发生旋转时,由于晶体的压电效应两侧振动臂对于中心,会出现不同的偏转数值, 根据此偏转,由处理器计算出角度的数值通过通信接口输出,用户直接会得到通信接口送出来的角度数值。
EPOSN之所 以选择石英晶体(QUARTZ)+类似半导体MEMS的生产制程,首先是因为传统MEMS陀螺仪荡器结构非常复杂,包括了AD转换器、温度补偿电路、偏流 电路等等,它最大的薄弱环节就在于其温度特性变化非常剧烈,陀螺仪检测范围限制在+/-2g左右;而QMEMS陀螺仪则采用石英晶体为元件,石英晶体硬度 及理化性质稳定,频率基本不随温度变化,由此产生的内部振荡损失也最小,QMEMS陀螺仪则可以将范围扩展至数百g左右。因此,QMEMS陀螺仪对于追求 高精度、高稳定性的电子设备是非常适合的。
关键字:XV4001 陀螺仪 石英晶体
编辑:王凯 引用地址:QMEMS陀螺仪结构及工作原理浅析
推荐阅读最新更新时间:2023-10-12 23:09
ADI第四代高性能低功耗 MEMS 陀螺仪
ADI公司的 iMEMS(R) ADXRS450 是极其稳定、抗振动、低功耗的 MEMS 陀螺仪,具有0.03度/sec/g 的线性加速度灵敏度,功耗仅为 6mA。 北京2010年5月12日电 /美通社亚洲/ -- Analog Devices, Inc.,全球领先的高性能信号处理解决方案供应商,最近开发出高性能、低功耗、数字输出的 ADXRS450 iMEMS(R) 陀螺仪,专门用于恶劣环境中的角速率(旋转)检测,以满足不断提高的精度、稳定度和抗振动抗冲击需求。MEMS(微机电系统)运动传感器在工业自动化、医疗和仪器市场的应用得到不断发展。与设计用于消费类应用的运动传感器相比,这些市场的 MEMS 传感器需要提供更高得
[工业控制]
MEMS传感器、制动器出现巨大增长
据市场研究公司IC Insights称,世界范围的基于MEMS半导体传感器和制动器的销售预计在2007年到2012年将以19%的年复合增长率增长,从2007年是41亿美元在五年内达到97亿美元。这种强劲的增长主要来源于消费电子中配置了更多的运动控制用户界面以及便携式系统中防跌落和保护功能。
IC Insights注意到,其预期的增长速度显著增加,在2003年到2007年之间MEMS传感器和制动器达到了9%的年复合增长率。
单位出货量预计较2007年同期以27%的年复合增长率增加,从2007年的13亿器件在5年内达到43亿器件。
在这同一时期,传感器、制动器总单位出货量预计以23%的年复合增长率从2
[焦点新闻]

解密波音747飞机中的Sperry垂直陀螺仪
陀螺仪可用于各种类型 航空 仪表的惯性导航系统和基本输入系统,是实现飞行和飞行 自动化 的关键部件。这次我们的拆解对象就是一个用于波音747 飞机 的Sperry垂直陀螺仪。 根据这个陀螺仪外壳上标注的1975年再测试标签,估计它是1970年左右波音747刚面世时在什么地方制造的。尽管器件尺寸和重量一向是主要考虑事项,但这个立方形外壳设计的Sperry盒子可不算轻巧,其边长约25cm,重量接近10kg。虽然外壳和内部组件都尽量采用铸铝,但最终效果仍然是一个笨重的大家伙。这种垂直陀螺仪主要用来测量飞机的侧倾角度(横滚)和姿态(俯仰角)。其名称源于设计核心是一个转轴呈垂直方向的旋转体。 内部架构 整个装置内部分为上下
[传感器]
ST带模拟和数字输出的超小型MEMS陀螺仪
通过提供可选的模拟或数字角速率绝对值输出,意法半导体推出LY530AL MEMS陀螺仪,提高设计灵活性,简化集成难度,并节省外部元器件。全程量可测角速率高达每秒+/-300度,在直观人机界面或增强型汽车导航GPS等应用中,意法半导体的全新陀螺仪可测量快速角位移。
新产品LY530AL MEMS采用16 引脚的LGA封装,尺寸为5 x 5 x 1.5 mm ,还有一个省电引脚,以最大化系统的整体能效,确保芯片的低功耗特性。其它简化设计和节省元器件的特性包括:集成的低通滤波器、片上IC接口和2.7V到 3.6V宽工作电压。此外,芯片内置一个自检功能,用户无需运动即可验证器件是否工作正常。
[传感器]
用可编程模拟电路实现MEMS陀螺仪测量系统
Leon Foucault在1852年发明了世界首个陀螺仪,这种传统的机械式陀螺仪如图1所示。Foucault认为,利用固定位置上的旋转物体可以测量地球的旋转。在理论上他的想法是正确的,但当时他只能让物体保持旋转数分钟的时间,因此不足以观察到地球的显著运动。不过随着电气马达的发明,陀螺仪突然变得切实可行了,因为马达能让物体无限地旋转下去。在这种思想指导下,人类发明了电动回转罗盘,并很快用于船只和飞机上。
微机电系统(MEMS)技术的飞速发展已经允许制造商在微型芯片上制造出完整的陀螺装置。不仅如此,随着时间的推移,MEMS陀螺仪价格正变得越来越便宜,体积也越来越小。技术的发展和价格的降低使得集成式MEMS陀螺仪能很
[传感器]
双轴微机械陀螺仪的移动机器人运动检测系统
引言 在未知环境中,路况具有复杂性及未知性特点。移动机器人准确的路况探测及其自身的平稳运行,对机载设备与探测任务本身都非常重要。目前,对移动机器人运动控制研究多集中在前向通道的算法研究,有关状态信息检测、传输反馈环节的研究相对较少。 双轴微机械陀螺仪传感器可以测量机器人的俯仰与翻转,但微机械陀螺仪有随机漂移性,无法直接应用,需要对输出值作算法处理。参考文献中的微机械陀螺仪随机漂移的算法,可以在一定程度上解决漂移方面的问题,但仍有改进的空间,滤波性能有待进一步优化提高。在现有自适应UKF算法的基础上,改变比例对称采样策略的相关参数可达到较好的滤波效果。现有的以ATmegal6为微处理器的CAN总线程序还有一些不完备之处,本文
[工业控制]
基于虚拟仪器的机载陀螺仪测试系统研究设计
虚拟仪器技术是软件代替部分硬件设计的技术,其中硬件模块实现信号的调理、采集和输出,而软件实现信号的处理、显示和产生。利用软件快速、灵活的运算处理能力,简化硬件模块功能,减少硬件模块体积,提高系统的稳定性和可靠性。另外,该技术只需更改软件就能满足大部分信号的测试,具有很强的灵活性和扩展性。
目前,传统的航空机载陀螺仪测试系统采用分立仪器搭建,具有成本高、自动化程度低、扩展性差的缺点,因此,这里提出一种基于虚拟仪器技术的航空机载陀螺仪自动测试系统的设计方案。
1 陀螺仪测试系统硬件设计
该系统硬件主要是以C8051F005单片机为核心,结合相应的外围电路实现A/D、D/A转换以及开关量的控制,采用模
[测试测量]
基于Fuzzy-PID的陀螺仪温度控制系统设计
摘 要:陀螺仪是舰船上的重要组成部件,其性能的稳定对于舰船的控制至关重要。将Fuzzy-PID算法应用于陀螺仪温度控制系统,以MCS-51单片机作为温度控制系统的核心部件,采用模糊PID算法以及其他的软硬件设计,实现了一套温度采集和控制的设计方案。
关键词:温度控制;Fuzzy-PID;陀螺仪
引言
---在舰船中,陀螺仪是关键的部件,陀螺球体与陀螺壳体之间的空间内充满悬浮液体。陀螺球体质量和悬浮液体比重的选择,应确保在悬浮液体加热到工作温度以后,陀螺球体可以拥有中性浮力。所以温度控制系统的设计应保证加热和保持充入陀螺部件的液体的常值工作温度为70%26;#177;0.2℃,因为在这个温度上陀螺球体具有中性浮力。
---传统
[传感技术]




 电子线路(非线性部分)第五版 (冯军,谢嘉奎)
电子线路(非线性部分)第五版 (冯军,谢嘉奎) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号