传统三坐标测量机配备最多的是触发式测头,用触发式测头测量物体时,测针以一定速度接触物体表面,从而使测针的位置产生偏离,产生的电信号触发测头记录一个物体表面测点的空间坐标。由此带来的第一个问题就是测量速度较慢。其原因在于,首先触发式测头的采点方式是非连续的,测头在一次采点完成后需退回一段距离,让测针归位后才能进行第二次采点。而且采点时接触物体表面的速度不能太快,若测针接触物体速度过快使得测针的位置偏离过大,则信号会被认为是发生了碰撞而采点失败。出于这个原因可以用扫描式测头代替触发式测头,扫描式测头采用的是连续采点方式,因此采点速度得到较大提升。限制测量速度的第二个原因在于,如果被测物体具有比较复杂的几何形状,那么测针需要变换若干次指向才能完成整个测量,并且测针的每个指向需进行标定。如果要克服这一不足,从而进一步提高测量速度的话,需要给三坐标测量机配备高端的多轴旋转扫描测头,该项新技术能够以连续方式高速扫描物体进行采点。
接触式测量所用的测针尖端一般为红宝石球,测头采点所得的空间坐标为红宝石球的球心位置。而测针与物体表面的实际接触位置并非球心,所以物点的坐标必须根据红宝石球的半径进行补偿。由此带来了接触式测量的第二个问题,即红宝石球的半径补偿方向错误。当被测几何特征较小(直径 《 1mm)且采点密度较大时,采得点的顺序会发生混乱,从而使球半径补偿方向产生错误,造成获得的几何特征与实际不符(图1)。

图1 叶片出气边的半径补偿错误
此外,由于物体表面存在一定不平度,同时红宝石球的直径要远大于表面不平度,导致测针无法测得物体表面的微小凹陷(图2)。

图2 红宝石球测针无法测得物体表面的微小凹陷
接触式测量的第三个问题在于被测物体的表面特性。如果被测物体表面比较柔软,或精细易损,则不适合使用接触式测头。当测针接触物体表面后,轻则使之发生形变,产生较大误差;重则损坏物体表面。
出于以上原因,光学测量与之相比就有着本质上的优势。光学测量作为一种非接触式测量方法,不使用接触式测针进行采点,而是利用了光的某方面特性来进行测量。这样就完全规避了红宝石球的补偿带来的潜在问题,也使被测物体表面不再受到测针接触带来的影响。至于测量速度则取决于光学测头的种类。但无论哪种测头,其采点方式都是连续的。而且在采点过程中,光学测头区别于接触式测头,接触式测头会因为接触物体表面时速度过快而被认为发生了碰撞,由于光学测头完全不会遇到这个问题,因此进一步提高了采点速度。
光学测头的分类方法有很多,种类更是繁复。从测量原理上通常可以分为共轴测量和三角测量;从光源属性上可以分为主动光源和被动光源;从光源维度上可以分为点光源、线光源和面光源;从光源色谱上又可以单色光源和白光源。共轴测量中常见的方法有两种。其一是干涉法,它利用了光的波长特性,将一束光通过平面分光镜(半透半反)分成两束。一束由镜面反射至参考平面,另一束则透射至被测物体表面。两束光经叠加后产生干涉条纹,干涉条纹的形式取决于物体的距离与物体表面的几何特征。另一种是共焦法,从一个点光源发射的探测光通过透镜聚焦到被测物体上,如果物体恰在焦点上,那么反射光通过原透镜应当汇聚回到光源,这就是所谓的共焦。在反射光的光路上加上了一块半反半透镜,将反射光折向带有小孔的挡板,小孔位置相当于光源。光度计测量小孔处的反射光强度,强度最大时物体即位于透镜焦点平面,这样即可测得物点的位置。三角测量则是利用了光源、像点和物点之间的三角关系来求得物点的距离。我们以点光源举例(图3):
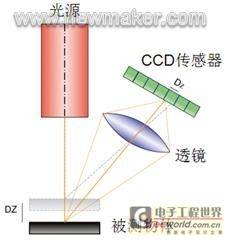
图3 三角测量示意图
光源向物体发射一个光点,光点到达物体后经过反射在传感器上得到一个像点;光源、物点和像点形成了一定的三角关系,其中光源和传感器上的像点的位置是已知的,由此可以计算得出物点的位置所在。有的测头以线光源来替代点光源,将一条由若干光点组成的光条纹投射到物体表面(图4),传感器上接收到的则是二维畸变光线图像,光线的畸变形状取决于每个物点的位置,这样的线光源测头可以大幅提高采点的速度。[page]

图4 将一条由若干光点组成的光条纹投射到物体表面
更有测头用光栅将一束光分散并编码,形成一定模式的结构光光源,这样在传感器上就可以得到一组畸变光线,从而进一步提高采点的速度(图5)。
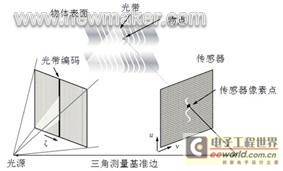
图5 测头用光栅将一束光分散并编码,形成一定模式的结构光光源
目前,各种光学测头采用的光源种类主要有激光和白光。激光作为一种准直、相干的单色光,广泛地作为点测头和线测头的光源。而白光则是由各种波长的光组成,因此颜色呈白色,目前较多地作为结构光光源。由于白光的物理特性,白光点测头也逐渐应用于测量领域中。激光和白光的最大区别在于,激光是一种单色光,因此拥有高度相干性,有些测头正是利用了激光的相干性来实现其功能;而白光是由各种波长的光组成,所以相干性相当微弱。如前所述,利用单色光的高度相干性可以根据某些原理进行测量,但事物的两面性同时说明,在有些地方相干性也会干扰测量。举例说明,激光测头利用物体表面的反射光进行三角测量时,照射到物体表面的激光会呈现颗粒状的结构,这种颗粒状的结构称为“散斑”,而这种现象称为“散斑效应”。散斑效应的产生,是由于激光照射在粗糙表面经反射造成的。大多数物体的表面与激光的波长相比都是粗糙的,因此当光波从物体表面反射时,表面各点都发出一束高度相干的子波,子波叠加的结果就形成了物体表面呈随机分布的散斑(图6)。

图6 子波叠加的结果就形成了物体表面呈随机分布的散斑
而白光由于由各种波长的光组成,因此相干性被大大削弱,所以在物体表面反射时,很难观察到散斑效应。这样的区别对于三角测量来说影响是十分巨大的。原因在于,三角测量是依靠像点在传感器上的位置来确定物点的空间位置的。而像点在传感器上通常不会是简单的一个点,反射光照射到传感器上使得一部分像素感光,计算机可以通过像素分析来确定这一群像素的中心,从而得到像点的位置。由于散斑效应的存在,使得要确定像点的位置变得非常困难,且误差较大。而分布均匀且对称的光点对像点位置的确定非常有利(图7)。这就是三角测量当中白光性能要优于激光的根本原因。
上一篇:如何做简单的气相色谱配置
下一篇:激光跟踪仪解决大型工件的测量问题
推荐阅读最新更新时间:2024-03-30 22:43

 机器视觉技术及应用 (韩九强, 胡怀中)
机器视觉技术及应用 (韩九强, 胡怀中)- 力源带你了解安森美半导体开发神器——高度灵活的物联网开发套件( IDK )!看视频轻松答题享好礼!
- 感谢有你,愿一路同行!——eeworld感恩节送书活动
- 3月21日有奖直播:ADI新一代高阻抗输入SAR ADC的优势与应用
- 您的电路保护有足够的空间吗?Littelfuse的881系列保险丝迎接这一挑战
- 下载Intel白皮书们,赢礼品获新知
- 中国版BeagleBone Black超低价团购!11月18日火爆开团
- ADI有奖下载活动之10 无线通信测试解决方案
- 提出你的电源问题&技术解答,提升自我电源知识,赢取好礼
- 找小伙伴们一起去闯 STM32 F7英雄联盟设计大赛
- 直播:罗姆DC/DC转换器设计研讨会




 京公网安备 11010802033920号
京公网安备 11010802033920号