在电力继电保护系统中,相位测量是一个经常性项目,从传统的“过零”法测量的情况看,要测量两个交流信号的相位角,通常的做法是将两个交流信号进行放大、整形,成为在过零点变化的方波,同时还要在一个回路中进行比较,进而测量出同频信号的相位差(Δtx)这一主要参数。但是往往现场测量需要接入的信号比较多,这很容易引起接线的错误。此外,对线路进行相位测量时有多个回路信号接入设备,倘若在现场出现接线错误,或者仪器内部通道之间的隔离出现问题,很容易引起回路之间的短路,导致事故发生。
基于以上情况,必须从原理上改变传统的测量方式以适应测试过程的需要。
用光信号同步的间接测量方法和结构
本设计采用了一种间接的测量方法,不需要将2个现场交流信号引入到同一个设备,即测量过程是分别在各个信号的回路独立进行的。这种间接的测量方法的条件是必须有一个同步信号作为测量基准,这样才能在各个独立回路的测量回路之间建立起关联,以便最后测量出Δtx和T0。在这里采用的是红外光信号进行同步相位测量的方法,利用光信号作为同步信号源,不需要在电路上的连接关系就可以进行同步,同时还可以利用它作为数据通信的载体。
本系统包含一个主机和几个测量部件。主机是系统的核心部分,而测量部件的数量取决于实际测量的需要(例如在测量六角图时,就应该是6个测量部件),主机是由MCS-51系列的AT89C51单片机为主体的部分,外围电路比较简单。它主要依靠一个光发射器和一个光接收器构成通信接口,单片机的输出端经过反相器驱动以后控制光发射器向测量部件发出调制光信号。而单片机的输入直接与光接收器相连,光接收器把测量部件发来的调制光信号进行解调,单片机则可以通过程序识别编码信号。光发射器主要用来启动测量过程,而光接收器则实现主机与测量部件之间的数据通信。
每个测量部件也是一个由AT89C51单片机为核心的智能化的测量电路,其外围部分主要包括光发射器、光接收器和测量电路(如图1所示)。测量电路是由OP07组成的放大电路和LM311组成的整形电路组成,主要功能是将交流信号转换为相应的方波信号。方波的输出与单片机的I/O线相连接,利用单片机内部的定时/计数器,可以测量到相关的时间值,进而计算出相位角。光发射器和光接收器的作用主要是实现测量,同时完成与主机的双向通信。
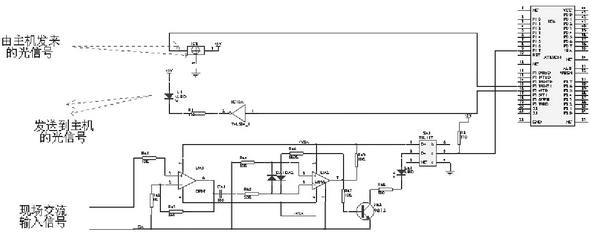
图1 测量部件的电路原理框图
间接测量法的原理
主机一方面控制测量过程,向各个测量部件发出红外光同步信号启动测量,另一方面各个部件完成测量以后,通过红外光通信将各个部件的测量数据汇总到主机,然后进行计算以确定被测参数,即引入三维变量的间接测量方式取代直接测量法。这种间接测量方式不再需要直接测量时差,只需建立每个参数和光同步信号之间的时间关系,再通过计算求出时差。回路不再需要在电路上的连接,仅仅依靠一个光同步信号就能够间接地测量到多个测量回路参数之间的相位关系。
这种方式的优点在于:各个测量回路不再需要参考点的连接,回路相对独立,分别测量各自的交流信号过零时刻与光同步信号之间的时间差,以作为相位测量的基本参数。它们之间的关联不是靠电路形式的连接,而是依靠光信号,这样就可以杜绝回路之间的短路发生,另外,还可以减少仪器的连线。光信号除了作为同步信号外,还作为数据传输通道,各个测量回路将测量数据通过光的传输,集中在主机部分最终完成参数的数值显示。
工作过程
在一个测量周期开始,由主机控制光发射器发出一个同步红外光信号,测量部件的光接收器都能在同一时刻接收到这一信号,各个测量部件的单片机会同时启动进行各自的测量过程,完成测量过程后,再由各个部件的单片机依次将测量数据传送回主机,主机单片机通过光接收头,依次接收到各个测量部件的数据并汇总这些基本数据,最后通过计算后主机就显示相应的数字值,至此完成一个测量周期。
主机部分
第一阶段,主机光发射器发出同步光信号,启动各个测量部件同时进入测量状态,此时,单片机的P3.4/T0引脚设置为输出状态,当工作时会产生调制信号,经过反相器74LS04驱动光电发送器,按照程序的约定这个信号是表示“启动”的光信号,即通过该光信号向每个测量部件传送开始测量的同步信号。
第二阶段,每个测量部件同时进入测量,测量完成后再由各个部件依次将测量数据传送回主机。主机对P3.3/INT1引脚的脉冲进行测量和程序识别,经过解码确定测量部件所发出的信号,完成“取回数据”的工作。 [page]
测量部分
每个测量部件电路结构如图1所示,其中以UA1(OP07)为主的部分是信号放大器,例如在以钳形电流作为对电流信号的测量时,输入的电信号一般比较小,必须经过放大处理。而以UA2(LM331)为主的部分则是过零比较电路,主要用于将信号转换为过零变化的方波,这个方波的上升沿表示交流信号的过零点。在图1中还包含光电耦合器SA1(TIL117),它一方面进行电路隔离,同时还将方波信号转换为TTL电平以便在单片机的P3.2(INT0)上进行测量,这个引脚设置为输入状态,利用软件很容易对方波信号的上升(或下降)沿进行测量。与现有电路比较,其测量部分简化了很多,传统电路是对两个回路的交流信号进行处理—即将两个信号的过零点在一个设备中进行直接比较以确定出相位差(Δtx)。而该电路不再基于对两个信号之间直接进行比较,且测量方法也发生了很大的改变,它是采用一个公共的光脉冲作为测量同步信号。
测量完成后由测量部件单片机的P3.4/T0引脚输出开关量信号,经过反相器74LS04驱动光电发送器,然后通过光信号向主机传送每个测量部件的测量数据。由于对每个测量部件都进行了编号,各个测量部件的工作程序会依据本身序号依次向主机发送数据。
工作时序
图2描述了进行数据通信的时序关系,当光接收器输出信号出现下降沿(即Ps=0)时,表示接收到主机的信号,上升沿到来时开始计时,而且以后的数据传送也是以这个上升沿为参照标准。测量时间Txi +T0i 和Txj+T0j不大于40ms。对于第一个测量部件在同步信号启动测量以后再延时TM1≥Txi +T0i就可以传送数据了。为了可靠,本设计取TM1=50ms作为测量过程的延迟时间。设每次传送数据的时间为TN,那么第二个测量部件传送数据的延时就是第一个延迟时间加上TN,即:TM2= TM1+TN,后面的延时TM的计算依次类推。
主机会根据这个过程在其内部存储区依次保存各个部分的测量数据,以便后来的计算和显示。
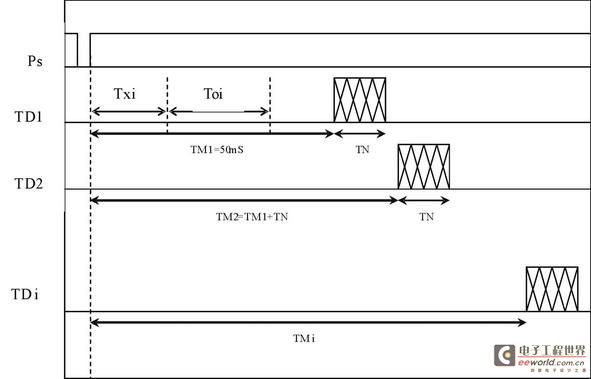
图2 数据通信的时序关系
结语
这种间接测量的方法是在传统的测量方法基础上的一种改进,光信号作为一个参照量被引入到测量过程,依靠计算机的控制、存储、运算和处理等功能,得到最终的参数数据。由于这种方法依靠光信号作为同步和数据传输,多个测量回路不再需要在电路上的直接连接,而是独立进行,这对于解决实际问题来说非常有用。
关键字:光信号 相位测量 同步
引用地址:基于光信号同步的相位测量方法
基于以上情况,必须从原理上改变传统的测量方式以适应测试过程的需要。
用光信号同步的间接测量方法和结构
本设计采用了一种间接的测量方法,不需要将2个现场交流信号引入到同一个设备,即测量过程是分别在各个信号的回路独立进行的。这种间接的测量方法的条件是必须有一个同步信号作为测量基准,这样才能在各个独立回路的测量回路之间建立起关联,以便最后测量出Δtx和T0。在这里采用的是红外光信号进行同步相位测量的方法,利用光信号作为同步信号源,不需要在电路上的连接关系就可以进行同步,同时还可以利用它作为数据通信的载体。
本系统包含一个主机和几个测量部件。主机是系统的核心部分,而测量部件的数量取决于实际测量的需要(例如在测量六角图时,就应该是6个测量部件),主机是由MCS-51系列的AT89C51单片机为主体的部分,外围电路比较简单。它主要依靠一个光发射器和一个光接收器构成通信接口,单片机的输出端经过反相器驱动以后控制光发射器向测量部件发出调制光信号。而单片机的输入直接与光接收器相连,光接收器把测量部件发来的调制光信号进行解调,单片机则可以通过程序识别编码信号。光发射器主要用来启动测量过程,而光接收器则实现主机与测量部件之间的数据通信。
每个测量部件也是一个由AT89C51单片机为核心的智能化的测量电路,其外围部分主要包括光发射器、光接收器和测量电路(如图1所示)。测量电路是由OP07组成的放大电路和LM311组成的整形电路组成,主要功能是将交流信号转换为相应的方波信号。方波的输出与单片机的I/O线相连接,利用单片机内部的定时/计数器,可以测量到相关的时间值,进而计算出相位角。光发射器和光接收器的作用主要是实现测量,同时完成与主机的双向通信。

图1 测量部件的电路原理框图
间接测量法的原理
主机一方面控制测量过程,向各个测量部件发出红外光同步信号启动测量,另一方面各个部件完成测量以后,通过红外光通信将各个部件的测量数据汇总到主机,然后进行计算以确定被测参数,即引入三维变量的间接测量方式取代直接测量法。这种间接测量方式不再需要直接测量时差,只需建立每个参数和光同步信号之间的时间关系,再通过计算求出时差。回路不再需要在电路上的连接,仅仅依靠一个光同步信号就能够间接地测量到多个测量回路参数之间的相位关系。
这种方式的优点在于:各个测量回路不再需要参考点的连接,回路相对独立,分别测量各自的交流信号过零时刻与光同步信号之间的时间差,以作为相位测量的基本参数。它们之间的关联不是靠电路形式的连接,而是依靠光信号,这样就可以杜绝回路之间的短路发生,另外,还可以减少仪器的连线。光信号除了作为同步信号外,还作为数据传输通道,各个测量回路将测量数据通过光的传输,集中在主机部分最终完成参数的数值显示。
工作过程
在一个测量周期开始,由主机控制光发射器发出一个同步红外光信号,测量部件的光接收器都能在同一时刻接收到这一信号,各个测量部件的单片机会同时启动进行各自的测量过程,完成测量过程后,再由各个部件的单片机依次将测量数据传送回主机,主机单片机通过光接收头,依次接收到各个测量部件的数据并汇总这些基本数据,最后通过计算后主机就显示相应的数字值,至此完成一个测量周期。
主机部分
第一阶段,主机光发射器发出同步光信号,启动各个测量部件同时进入测量状态,此时,单片机的P3.4/T0引脚设置为输出状态,当工作时会产生调制信号,经过反相器74LS04驱动光电发送器,按照程序的约定这个信号是表示“启动”的光信号,即通过该光信号向每个测量部件传送开始测量的同步信号。
第二阶段,每个测量部件同时进入测量,测量完成后再由各个部件依次将测量数据传送回主机。主机对P3.3/INT1引脚的脉冲进行测量和程序识别,经过解码确定测量部件所发出的信号,完成“取回数据”的工作。 [page]
测量部分
每个测量部件电路结构如图1所示,其中以UA1(OP07)为主的部分是信号放大器,例如在以钳形电流作为对电流信号的测量时,输入的电信号一般比较小,必须经过放大处理。而以UA2(LM331)为主的部分则是过零比较电路,主要用于将信号转换为过零变化的方波,这个方波的上升沿表示交流信号的过零点。在图1中还包含光电耦合器SA1(TIL117),它一方面进行电路隔离,同时还将方波信号转换为TTL电平以便在单片机的P3.2(INT0)上进行测量,这个引脚设置为输入状态,利用软件很容易对方波信号的上升(或下降)沿进行测量。与现有电路比较,其测量部分简化了很多,传统电路是对两个回路的交流信号进行处理—即将两个信号的过零点在一个设备中进行直接比较以确定出相位差(Δtx)。而该电路不再基于对两个信号之间直接进行比较,且测量方法也发生了很大的改变,它是采用一个公共的光脉冲作为测量同步信号。
测量完成后由测量部件单片机的P3.4/T0引脚输出开关量信号,经过反相器74LS04驱动光电发送器,然后通过光信号向主机传送每个测量部件的测量数据。由于对每个测量部件都进行了编号,各个测量部件的工作程序会依据本身序号依次向主机发送数据。
工作时序
图2描述了进行数据通信的时序关系,当光接收器输出信号出现下降沿(即Ps=0)时,表示接收到主机的信号,上升沿到来时开始计时,而且以后的数据传送也是以这个上升沿为参照标准。测量时间Txi +T0i 和Txj+T0j不大于40ms。对于第一个测量部件在同步信号启动测量以后再延时TM1≥Txi +T0i就可以传送数据了。为了可靠,本设计取TM1=50ms作为测量过程的延迟时间。设每次传送数据的时间为TN,那么第二个测量部件传送数据的延时就是第一个延迟时间加上TN,即:TM2= TM1+TN,后面的延时TM的计算依次类推。
主机会根据这个过程在其内部存储区依次保存各个部分的测量数据,以便后来的计算和显示。

图2 数据通信的时序关系
结语
这种间接测量的方法是在传统的测量方法基础上的一种改进,光信号作为一个参照量被引入到测量过程,依靠计算机的控制、存储、运算和处理等功能,得到最终的参数数据。由于这种方法依靠光信号作为同步和数据传输,多个测量回路不再需要在电路上的直接连接,而是独立进行,这对于解决实际问题来说非常有用。
上一篇:万用示波表在变频器分析测量中的应用
下一篇:信号完整性与电源完整性的仿真分析与设计
推荐阅读最新更新时间:2024-03-30 22:54
基于tanh函数的永磁同步电机无位置传感器控制研究

摘 要:为削弱传统滑膜观测器(Sliding Mode Observer, SMO)中由于控制函数的不连续性而引起的系统抖振,设计一种基于双曲正切函数tanh的改进型SMO,采用截止频率可变的策略对转子位置角进行相位补偿并且结合锁相环估计转子位置,在同步旋转d - p 轴坐标系下建立和分析了改进型SMO,利用MATLAB/Simulink工具搭建改进SMO的仿真模型。仿真实验结果表明:改进型SMO能有效削弱系统抖振,提高了转子估计的准确性,系统的动静态特性和鲁棒性得到有效的改善。 0 引言 永磁同步电动机自身具有的高可靠性、高功率密度、高效率以及相对较小的形状体积等良好特性 ,在新能源汽车中作为电动汽车的驱动系统已得到越来
[汽车电子]

曲轴连杆120°相位角测量检具
发动机的六拐曲轴连杆呈120°空间相位角均匀分布,且相位角偏差要求严格,因此其加工和测量较为复杂。目前常用的曲轴连杆120°相位角偏差的测量方法大多存在测量精度不高、操作不便等缺点。为此,我们研制了一种可准确、方便地测量曲轴连杆120°相位角偏差的测量检具。 现以玉柴发动机用YC6105QC曲轴为例,介绍该检具的结构及测量方法。YC6105QC曲轴的主轴及连杆1、2、3的平面投影如图1所示。该曲轴连杆的技术要求为:连杆直径d=70-0.030mm,主轴直径D=850- 0.035mm,中心距R=62.5+0.05mm;连杆1-6、2-5、3-4的平行度要求为100:0.02,空间相位角为120°30'。 1.一 连杆整位
[测试测量]
基于单片机的低频数字相位测量仪的设计
频率是信号的重要参数之一,如何获得这一准确数据已经在信息领域显得越来越重要了[1,2]。相位测量在信号提取、检测、处理等方面有着重要的应用[3]。本设计采用89C52单片机和可编程逻辑器件(CPLD)为核心,利用单片机进行数据处理并显示结果,软件采用汇编语言实现,构成低频信号频率相位测量仪。? 1 系统工作原理 本设计以89C52单片机和可编程逻辑器件(CPLD)为核心,构成低频信号频率相位测量仪。该仪器具有移相、频率和相位测量2大功能。移相电路由移相网络和信号放大电路组成,对固定频率信号(100 Hz,1 kHz,10 kHz)可满足-45~+45的相移要求;频率、相位测量电路由阻抗变换电路、整形电路、分频电
[单片机]
仪器操作 | 双通道信号源如何实现四信号相位同步
随着对效率、带宽和性能的需求日益增长,工程师必须推出新技术来提高频谱和功率效率。信号相位的重复性、可预测性和可调性在现代通信和仪器仪表应用中均起到日益重要的作用。 本期视频贝贝带大家学习如何替代四通道信号源实现四个信号相位同步,快来围观吧~
[测试测量]
Freescale同步串行传输SPI优化设计
Freescale系列的MCU大部分都存在一个SPI模块,它是一个同步串行外围接口,允许MCU与各种外周设备以串行方式进行通信。 目前,Freescale系列的大多数单片机总线不能外部加以扩展,当片内I/O或者存储器不能满足需求时,可以使用SPI来扩展各种接口芯片。这是一种最方便的Free-scale系列单片机系统扩展方法。 SPI系统主机最高频率=主机总线频率/2,从机最高频率=从机总线频率,即硬件体系决定了SPI的最高工作频率。如何在硬件体系结构已定的情况下,使I/O或存储器数据传输效率最高,成为SPI使用的一个关键问题。 1 同步串行传输SPI结构及常规操作 图1为Freescale同步串行传输SPI的体系结构
[单片机]
MAX8686电流模式同步整流PWM降压调节器
MAX8686电流模式同步整流 PWM降压调节器 内置MOSFET,工作电压范围:4.5V至20V,可产生0.7V至5.5V可调输出电压,每相可提供高达25A的电流。 MAX8686采用峰值电流检测模式,开关频率调节范围为300kHz至1MHz。可调限流门限允许针对具体应用的负载电流进行优化。可通过外部检流电阻限制电感电流或利用电感进行无损电流检测。折返式限流和打嗝式限流可降低过载或短路情况下的功耗,故障排除后可自动恢复工作。 MAX8686即使在输出存在预偏置电压时也能够实现单调启动。此外,还提供可调节的软启动,实现受控开启过程。MAX8686内置精度为1%的基准,所提供基准输入用于支持更高精度的外部基准,实现电压追踪设
[电源管理]
光信号传输终端设备及其配置应用分析研究
光端机顾名思义就是光信号传输的终端设备。由于目前光纤的大幅降价及其在各个领域的广范应用,光端机的使用量越来越大,各光端机生产厂家也如雨后春笋般相继出现。但因其中一部分技术在光端机市场还很小时就已比较成熟,开发新技术又需耗费大量人力、物力,所以光端机生产厂家多以中小企业为主,各种品牌层出不穷,但质量却大相径庭。国外一些知名品牌的光端机(如IFS、fiber、options、optelecom)以其良好的性能进入中国市场,成为一些大项目的指定品牌,但其昂贵的价格让一些用户无法接受,在这种环境下国内一些有影响力的光端机生产厂家开始把产品转向生产数字光端机,以求在性能上不输给国外品牌,价格又能让用户接受。国内这些企业从自身入手,从
[安防电子]
Intersil公司推出新系列单片式同步降压稳压器
2016年4月12日,创新电源管理与精密模拟解决方案领先供应商Intersil公司宣布,推出新系列单片式同步降压稳压器--- ISL7823x,可将5V和3.3V主电源电压步降到可低至0.6V的负载点(POL)输入电压,为GPU、FPGA、DSP和SoC供电。高效的ISL78233、ISL78234和ISL78235分别提供3A、4A和5A连续输出电流,供给给车载信息娱乐系统音响本体,以及采用前视智能摄像头来发现和对目标物进行分类的高级驾驶辅助系统(ADAS)等。这些引脚兼容的同步降压稳压器,有助于系统设计工程师进行简单的物料清单(BOM)变更,并为印刷电路板(PCB)选择合适的器件,以满足从基础配置到豪华配置的各档汽车的不同负载要
[汽车电子]
 高频电子线路 第2版 学习指导与题解 (阳昌汉)
高频电子线路 第2版 学习指导与题解 (阳昌汉) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号