CAN总线设计规范对于CAN节点的差分电平位信号特征着严格的规定,如果节点的差分电平位信号特征不符合规范,则在现场组网后容易出现不正常的工作状态,各节点间出现通信故障。具体要求如表 1所示,为测试标准“GMW3122信号特征标准”。

在以往的测试中,我们只能通过示波器测量1bit的差分电平显性位的末端幅值,然后在测量前半段(50%)差分电平最大值,两者相除,如果在81%~150%则通过;
然后在测量后半段(50%)差分电平最大值,除以分电平显性位的末端幅值,如果在95%~105%则通过;
由此可见,该方法虽然可以大致测量出CAN节点的差分电平位信号特征,但由于其用于做分析的样本很少,测量方式有很难操作,所以为了提高测量结果的准确度,减低人工成本,广州致远电子股份有限公司改进了测试方法,使用CANScope-Pro总线分析仪、CANScope-StressZ扩展板,使用配套软件的样眼图与对称性测试进行测量。
试验方案如下:
1. 如图 1所示,进行测试连接。测试使用CANScope-Pro的眼图功能,进行统计以达到高的测试精度。DUT上电后,要一直发送CAN报文, CANScope不勾选总线应答,其黑色表笔(地)要和DUT的CAN收发器共地。
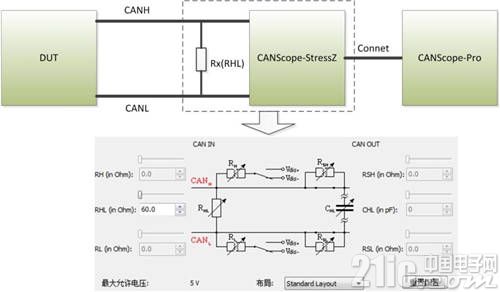
图 1 信号特征测试连接图
2. 打开CANScope,在DUT正常发送报文后,如图 2点击启动,开启设备的眼图功能,获取到如图 3所示的眼图波形。

图 2 启动眼图功能

图 3 眼图功能
3. 通过光标,先测量出眼图信号末端的幅值,如图 3所示,为2.15V。然后再测量bit前半段的最大幅值,如图 4所示为2.73V。则2.73/2.15=127%,符合GMW3122。
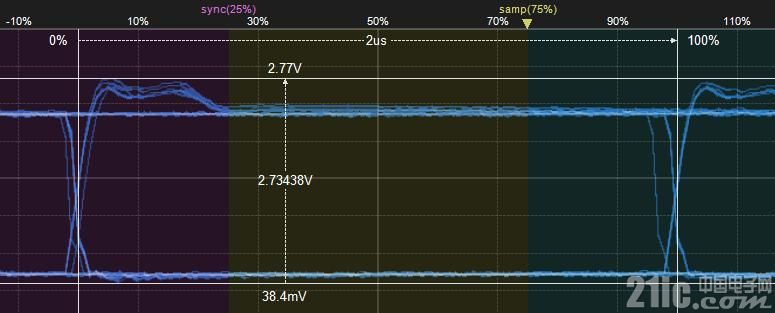
图 4 前半段最大幅值
4. 然后再测量bit后半段的最大幅值,如图 5所示,为2.25V。则2.25÷2.15=104%,符合GMW3122信号特征标准。
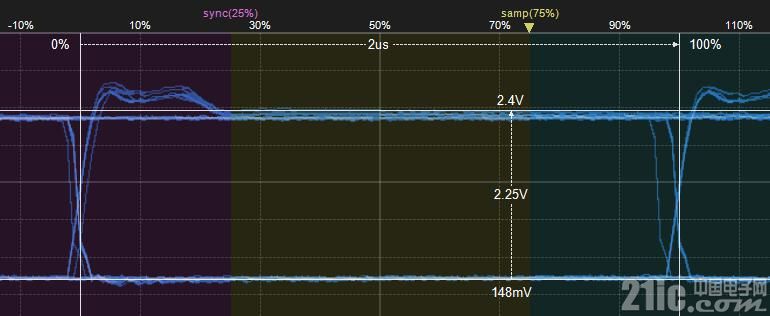
图 5 后半段最大幅值
5. 为了精准测试CANH+CANL的电压值,需要使用对称性测试功能,如图 6所示,在“测试”中点击启动“对称性测试”。

图 6 对称性测试
6. 如图 7,在“对称性测试”操作窗口中,首先点击“自动设置”调整电压范围,让后将误差电压调整成0.4后,即可点击“开始测试”按钮,等待测试结果做判定。
注意:由于GMW3122规定CANH+CANL的电压要在4.2V~5.8V,而正常为5V。所以在采用对称性测试时,其中使用的是(CANH+CANL)/2进行判别。 所以标准范围为2.1V~2.9V,正常为2.5V。因此图 7中误差电压需要填入0.4。
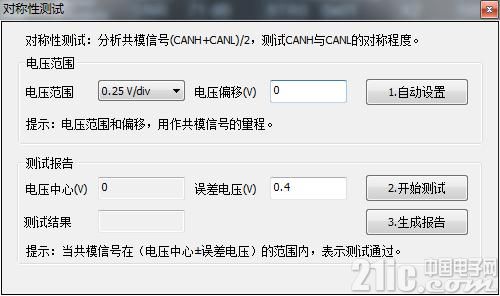
图 7 对称性测试CANH+CANL
如果测试结果通过,则CANH+CANL的电压是符合4.2V~5.8V的。
CANScope分析仪周立功致远电子研发的一款综合性的CAN总线开发与测试的专业工具,集海量存储示波器、网络分析仪、误码率分析仪、协议分析仪及可靠性测试工具于一身,并把各种仪器有机的整合和关联;重新定义CAN总线的开发测试方法,可对CAN网络通信正确性、可靠性、合理性进行多角度全方位的评估;帮助用户快速定位故障节点,解决CAN总线应用的各种问题,是CAN总线开发测试的终极工具。
关键字:CAN节点 信号特征测试
引用地址:
如何进行CAN节点信号特征测试
推荐阅读最新更新时间:2024-03-30 23:20
CAN总线下的燃料电池汽车空调控制节点
在能源日趋紧张、空气污染日益严重的今天,开发具有自主知识产权的新型燃料电池汽车是我国汽车产业的一个重要飞跃和里程碑,也是国家重点扶持的主要领域之一。燃料电池汽车与传统燃油汽车相比具有环保、节能(氢气为燃料)、运行平稳无噪声等特点。燃料电池汽车系统的核心是它的动力系统,即燃料电池发动机,同时配备高功率锂离子电池,能够回收下坡和制动能量。整个汽车系统由若干控制单元组成,各单元通过汽车总线彼此相连,其中空调控制系统是这种新型能源汽车的一个辅助控制单元,但它也是汽车系统的一个重要组成部分。本文将给出一种采用通用微控制器(MCU)和独立CAN控制器和收发器为核心的智能节点,完成与汽车系统之间的通信和控制由数字信号处理器DSP2407为控制芯
[汽车电子]
基于CAN总线的温度检测节点设计
在对电子点火模块的测试中,为了模拟电子点火系统的真实工况,电子点火模块往往被置于高于常温的环境下进行电子点火实验,以获得最接近真实汽车运行工况的点火参数数据。由于电子点火模块自身的发热,其核心元件的温度成为影响电子模块性能的重要因素;另外,还要考虑环境温度是否达到模拟真实工况的要求等。 本文介绍了一种应用LM35温度传感器和PICMicro的温度检测节点的设计方案,用于检测在模拟汽车电子点火的过程中,电子点火模块的核心模块温度和环境温度,将阐明模块结构、工作原理及采样值量化的方法。 节点原理与结构 该温度检测节点由传感器电路、信号调理电路、单片机应用系统、CAN总线接口等构成。电路基本工作原理是:传感器电路将感应
[工业控制]
基于SJA1000的CAN总线系统智能节点设计
摘要: CAN总线上的节点是网络上的接收和发送站。智能节点能通过编程设置工作方式、ID地址、波特率等参数。它主要由单片机和可编程的CAN通信控制器组成。本文介绍这类节点的硬件设计和软件设计。软件设计包括SJA1000的初始化、发送和接收等应用中的最基本的操块子程序。
关键词: 总线 节点 CAN控制器
引言
CAN(Controller Area Network)总线,又称控制器局域网,是Bosch公司在现代汽车技术中领先推出的一种多主机局域网。由于其卓越的性能,极高的可靠性,独特灵活的设计和低廉的价格,现已广泛应用于工业现场控制、智能大厦、小区安防、交通工具、医疗仪器、环境监控等众多领域
[应用]
基于ARM的CAN总线智能节点的设计
CAN(Controller Area Network)即控制器局域网,CAN总线是国际上应用最广泛的现场总线之一。它最早是由德国Bosch公司推出的,CAN通信协议是一种用于汽车内部测量与执行部件之间的数据通信协议。 作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN总线已被广泛应用于各个自动化控制系统中。例如,在汽车电子、自动控制、智能大厦、电子系统、安防监控等各领域中,CAN总线具有不可比拟的优越性。本设计给出CAN总线节点方案。它采用内置多路CAN总线控制器PLC2294作为主控制器,使得该节点体积小、功耗低、抗干扰性好,因而特别适用于汽车、工业控制以及医疗系统和容错维护总线中。 1 硬件设计
[单片机]

基于DSP 技术和CAN总线的多节点远程数据传输系统
1 引言 控制局域网CAN属于现场总线范围,是德国Bosch 公司从20 世纪80 年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速度可达1 M bit/ s. CAN 协议的最大特点是废除了传统的站地址编码,而对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11 位或29 位二进制数组成,因此可以定义211或229个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。 2 系统设计 在很多野外或测量环境比较差
[嵌入式]
基于EasyJTAG仿真器上采用LPC2292单片机实现CAN节点的设计
引言 CAN(Controller Area Network)总线控制器局域网络是在1986年2月的SAE大会上,由RoberBosch公司首先提出的。CAN总线是一种串行通信协议,它能有效支持高安全等级的分布式实时控制,其最初的目的是用在汽车上。但由于采用了许多新技术及独特的设计,CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性,目前的应用范围已不局限于汽车行业,而是扩展到了机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械、家用电器及传感器等诸多领域。CAN节点的设计多采用单片机,为此,本文给出了一种基于本身已经嵌入了CAN控制器的单片机LPC2292的CAN总线智能节点的设计方案。 1、
[单片机]








 自动控制系统(原书第10版) (法里德·高那菲(Farid Golnaraghi) etc.)
自动控制系统(原书第10版) (法里德·高那菲(Farid Golnaraghi) etc.) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号