灵敏度是衡量GPS接收机能力的最重要的测试之一。实际上,许多消费级的GPS接收机,通常最终接收机产品测试中只执行RF测试。在高的标准下,灵敏度测试定义了最低卫星功率等级,以使接收机仍然能够跟踪和定位在头上的卫星。有人可能会认为,GPS接收机需要通过几层低噪音放大器获得很高的增益以放大信号来达到适当的功率等级。非常不幸,用低噪音放大器增加信号功率,同时也会降低信噪比。这样,当GPS信号的RF功率等级降低了,信噪比也会降低,最终接收机不能追踪到卫星。
所谓GPS接收机的灵敏度,是指GPS接收机可以正常工作所需要的输入最小信号强度,一般用dBm表示。根据GPS接收机的不同工作状态,灵敏度又分为冷启动灵敏度、捕获灵敏度、跟踪灵敏度等。就像名称所述,捕获灵敏度代表接收机完成位置定位的最低功率等级。跟踪灵敏度是接收机能够追踪一个卫星的最低功率等级。
在本文中,我们针对跟踪灵敏度的测量提出了有别于传统传导式的空间测量方法。
首先,我们会从GPS接收机的通常结构讨论展开空间测量方法的必要性。在通常的设计中,GPS接收机具有以下流水结构:
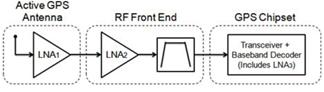
图一
如图一所示,最前端是一个含有LNA的有源接收天线,其次是射频前端包含了一个LNA和一个带通滤波器,最后是一个GPS芯片。
可以看出,接收机的灵敏度受到两个方面的影响:1)GPS整个射频通道的性能,包括天线增益、通道增益、通道噪声系数等;2)GPS基带算法性能。另外,灵敏度还受到A/D量化损失等因素的影响。
业界所标称的接收芯片灵敏度都是指基带算法的性能,该性能是指基带算法对输入载噪比(C/N0,单位为dBHz)的要求,但业界对GPS接收芯片的灵敏度性能表述一般用dBm为单位。在不考虑射频通道任何损失的情况下,载噪比(C/N0)和输入信号强度(S)之间的关系为:
C/N0=S-(-174) e1
在考虑射频通道的情况下,系统灵敏度Sensitivitymin(dBm)与载噪比C/Nmin及噪声因子Freciever的关系为:
Sensitivitymin=-174dBm/Hz+C/Nmin+Freciever e2
其中


例如,标称跟踪灵敏度为-159dBm的芯片,实际上是指其基带部分所需要的输入最小载噪比为-159+174=15(dBHz)。如果射频通路设计不佳,则整个接收机的实际跟踪灵敏度比-159dBm要差。
所以说,从上面的分析可以看出厂商所标称的跟踪灵敏度,以及用射频传导方法测量所得的跟踪灵敏度在实际上会有相当的差别。
而从图一及e3 我们可以发现,在射频传导方式下,第一个有源天线将会被忽略,而在整个射频通道中,对系统噪声因子影响最大却是这个包含LNA的有源天线。同样,他对整个系统的跟踪灵敏度有着重要的影响。
例如,如图一所示的GPS接收机部件有如下(表一)增益及噪声系数,

表一
在考虑有源天线及其LNA的情况下,根据公式e3我们可得:

而在不考虑有源天线及其LNA的情况下,根据公式e3我们可得:

虽然e6是业界进行GPS跟踪灵敏度计算的经典的理论算法,如果只用载噪比衡量追踪灵敏度,自然NF对其影响不大,但是如果考虑到整个射频通道的设计的情况下,从e5和e6我们可以看出考虑及不考虑有源天线所带来的影响。这个影响将直接通过式e2反应出来。
所以说,对整个接收机进行空间方式的灵敏度测量更为直观及准确,这也是本文的出发点所在。
下期将对测量方法的实现进行分析及讨论。
引用地址:
在OTA暗室中测GPS设备灵敏度方法讨论(一)
推荐阅读最新更新时间:2024-03-30 23:21
灵敏度和噪声-频谱分析基础
灵敏度 频谱分析仪的主要用途之一是搜索和测量低电平信号。这种测量的最终限制是频谱分析仪自身产生的噪声。这些由各种电路元件的随机电子运动产生的噪声经过分析仪多级增益的放大最后作为噪声信号出现在显示屏上。该噪声在频谱分析仪里通常称为显示平均噪声电平,或称 DANL。(显示平均噪声电平有时会和“灵敏度”混淆。虽然它们之间有关系,但是含义并不相同。灵敏度是在一定的信噪比(SNR)或比特误码率的情况下可测量到的最小信号电平。它是无线电接收机性能的一个通用指标。而频谱分析仪的指标总是以 DANL 给出。) DANL 中看到的噪声功率由热噪声和频谱分析仪的噪声系数组成。虽然使用一些技术可以测量略微低于 DANL 的信号,但是 DANL 始终限制
[测试测量]

MEMS麦克风技术规格和术语阐释
简介
在ADI公司的众多产品中,MEMS麦克风IC的独特之处在于其输入为声压波。因此,这些器件的数据手册中包括的某些技术规格可能不为大家所熟悉,或者虽然熟悉,但其应用方式却比较陌生。本应用笔记解释MEMS麦克风数据手册中出现的技术规格和术语,以便帮助设计人员将麦克风正确集成到系统之中。
灵敏度
麦克风的灵敏度是指其输出端对于给定标准声学输入的电气响应。用于麦克风灵敏度测量的标准参考输入信号为94 dB声压级(SPL)或1帕(Pa,衡量压力的单位)的1 kHz正弦波。对于固定的声学输入,灵敏度值较高的麦克风的输出水平高于灵敏度值较低的麦克风。麦克风灵敏度(用dB表示)通常是负值,因此,灵敏度越高,其绝对值越小。
务必
[嵌入式]
比TOF激光雷达灵敏度高10至100倍 Insight推FMCW相干激光雷达
据外媒报道,Insight LiDAR公司宣布推出数字式相干激光雷达(Digital Coherent LiDAR),该芯片级、远程激光雷达 传感器 主要面向新兴的自动驾驶汽车市场。该款激光雷达基于调频连续波(FMCW)技术,与目前飞行时间(ToF)激光雷达传感器相比,拥有许多独特优势。Insight LiDAR公司是Insight Photonic Solutions公司的衍生公司,是设计、制造用于成像和传感应用的高线性、扫描波长激光光源的领导者。 自动驾驶车辆需要大量传感器来解读周围世界,从而做出正确及时的决策。但是接受瑞银集团(UBS)采访的自动驾驶汽车专家中,有93%都认为,激光雷达是自动驾驶车辆的先决条件,但是现有的
[汽车电子]
佳能RGBW传感器专利 提升84%感光灵敏度
最近佳能传感器专利满天飞,除了有各种曲面传感器新设计以外,佳能还在研发RGBW传感器。RGBW传感器顾名思义就是在传统的RGB(三原色)基础上增加对W(白色)的感知,可以有效提升传感器的感光灵敏度达到约184%。目前华为P8已经采用索尼生产RGBW传感器,而且有消息指出未来的索尼A7S III上也有望搭载RGBW传感器。 编辑点评:RGBW传感器的原理是在传统拜耳阵列CMOS内增加白色感光像素,好处就是可以大幅增加感光灵敏度;但相对的,原本4个相邻像素就可以计算出的色彩现在需要九个像素来完成(一个九宫格内包含1组RGGB和5个W像素),锐度会受到一定的影响,而摩尔纹和伪色也可能相应的增加。我们知道在拜耳阵列CMOS上要想提
[家用电子]
频谱分析仪的频率分辨力和测试灵敏度
频谱分析仪的频率分辨力和测试灵敏度 简单介绍了频谱分析仪的工作原理和频谱分析仪的频率分辨力,提出了使用频谱分析仪进行测试时如何选择频率分辨力和提高测试灵敏度。 关键词:频谱分析仪 频率分辨力 测试灵敏度 一、 频谱分析仪的简单工作原理 现在所用的频谱分析仪多为超外差式,并采用多次变频(3~4次),以降低中频频率,实现窄通带和高分辨力。超外差式频谱分析仪的基本工作原理如图 1所示。输入信号与本振(LO)混频,产生中频(IF)信号经窄带中放被送到包络检波器,检波器输出信号被放大并使屏幕显示产生垂直偏转,扫描发生器保证屏幕显示的水平频率轴和本地振荡器调谐同步,它同时驱动水平偏转调谐LO。 图 1 超外差式频谱分
[模拟电子]
传感器的设计要点解析
好的传感器的设计是经验加技术的结晶。一般理解传感器是将一种物理量经过电路转换成一种能以另外一种直观的可表达的物理量的描述。而下文我们将对传感器的概念、原理特性进行逐一介绍,进而解析传感器的设计的要点。
1传感器的概念
传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。
国家标准GB7665-87对传感器下的定义是:“能感受规定的被测量件并按照一定的规律(数学函数法则)转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。
2传感器的工作原理
传感器工作
[嵌入式]
全方位拉伸亦能保持灵敏度,仿生电子皮肤像鳄鱼皮般柔韧
材料科学学术期刊《Small》封面。 图片来源:浦项科技大学 开发具有多种感官的电子皮肤对于康复、医疗保健、假肢和机器人技术等诸多领域都至关重要。这项技术的关键之一是可拉伸压力传感器,它可检测各种类型的触摸和压力。最近,韩国浦项科技大学和蔚山大学的联合团队受鳄鱼皮启发,创造出一种全方位可拉伸压力传感器。研究结果以封面论文形式发表在最近的《Small》杂志上。 鳄鱼具有非凡的感知能力,能探测小波浪和猎物的方向,这是通过其皮肤上的极其复杂且敏感的感觉器官实现的。该器官由半球形的感觉凸起组成,以重复的方式排列,之间有皱纹铰链。当鳄鱼移动身体时,铰链变形,而感觉部分不受机械变形的影响,使鳄鱼在水下游泳或捕猎时对外界刺激保持异常
[医疗电子]
单片机编程检验总结
经验之一:用“软件陷阱+程序口令”对付PC指针的弹飞 当CPU受到外界干扰,有时PC指针会飞到另一段程序中,或跳到空白段去。其实,如果PC指针飞到空白段去,倒也好处理。只要在空白段设立软件陷阱(拦截指令),将程序拦截到初始化段或程序错误处理段。但是,如果PC指针飞到另一段程序中去了,系统如何办?小匠在这里推荐一种方法——程序口令,思路如下: 1、首先,程序必须模块化。每个模块(子程序)执行一个功能。每个模块只有一个出口(RET)。 2、设立一个模块(子程序)ID寄存器。 3、为每个子程序配置一个唯一的ID号码。 4、每当子程序执行完毕,要返回(RET)之前, 先将本子程序的ID号送入 ID寄存器。 5、返回到上级程序
[单片机]







 自动控制系统(原书第10版) (法里德·高那菲(Farid Golnaraghi) etc.)
自动控制系统(原书第10版) (法里德·高那菲(Farid Golnaraghi) etc.)










 京公网安备 11010802033920号
京公网安备 11010802033920号