引言
在超声波测距车载应用中,例如:超声波泊车辅助 (UPA) 和盲点探测 (BSD) 等,系统发射的超声波被周围物体反射回来。系统接收反射波(回波),然后将物体的回波振幅与某个阈值比较,从而实现探测物体的目的。物体越靠近系统,其回波也越强。因此,阈值随时间而变化,是一种相对常见的情况。本文将向您论述,该阈值无需变化,可以保持固定不变。
超声波测距
小轿车中使用的高级驾驶员辅助系统 (ADAS) 便是一种超声波测距应用。安装在车载前后保险杠和后视镜上的超声波传感器发射出超声波,然后接收周围物体反射回来的超声波。超声波的传播时间(飞行时间)用于计算到物体的距离,从而帮助驾驶员泊车:寻找泊车点,或者探测驾驶员盲点区域内的物体。车载前后保险杠安装的传感器达到 4 个之多,另外,每个后视镜上还各装有一个传感器。
在超声波高级驾驶员辅助系统中,压电式传感器一般用于将电信号转换为超声波,然后再把反射回来的超声波转换为电信号。接受反射回波时,压电式超声波传感器的低接收机灵敏度通常会导致电信号非常微弱。
图 1 显示了用于处理回波电压的典型信号链。TI PGA450-Q1 是一款集成车载超声波传感器信号调节器,适用于 UPA 系统等应用。
图 1 使用回波处理探测物体的 ADAS
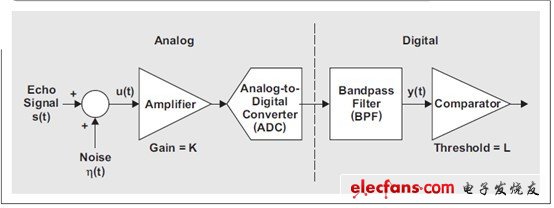
超声波接收机接收到的回波信号s(t)被噪声破坏。图 1 所示输入相关噪声η(t)为外部环境噪声和所有信号链组成部分的和,其与时间(t)相关。被破坏的信号 u(t) 经由放大器使用增益 K 放大,然后通过一个模数转换器 (ADC) 被数字化。数字化的 AM 信号经过一个带通滤波器 (BPF) 按线路传输。该滤波器主要用于改善信号的信噪比。把经滤波后的信号 y(t) 与阈值 L 比较,以探测某个物体的存在。BPF 的后面一般会有一个振幅解调器,其将信号转换为基带,以进行比较。但是,本文为了方便说明,我们忽略了这种解调器。因此,探测物体的关键是阈值 (L) 的选择。那么,我们如何选择 L 呢?
回波振幅
发射器产生的超声波为一系列载波频率下的正弦波脉冲,并以声压级 (SPL) 来描述。SPL 的计算方法如下:

其中,Prms 为 RMS 声压,而 pref 为基准声压。常用基准声压为 20 µPa,即 0.0002 µbar。
传感器对某个物体产生的超声波 SPL,取决于物体到传感器的距离。特别需要请注意的是,声压同距离成反比例关系:
其中,p 为声波压力,而 d 为物体到传感器的距离。超声波传感器规范说明了30cm 距离的 SPL。由该值,利用这一距离定律,我们便可以计算出任意距离 x的 SPL:

其中,x 为传感器和物体之间的距离,并且 x > 30 cm。因此,x 距离的 SPL 为:

也就是说,超声波从传感器传播到物体过程中,会损失声压。
声波从物体反射回来,返回到传感器,声压进一步损失。另外,由于空气和物体都会吸收一部分声压,所接收回波的 SPL 可以通过方程式 3 进行近似计算。具体方程式请见本页末尾处,方程式中 α 为空气吸收系数。请注意,空气吸收的 SPL 与声波在空气中传播的距离与正比。换句话说,SPL 损失与 x 成正比。我们使用因数 2,是因为声波在传感器和物体之间传播两次—一次从传感器到物体,一次从物体到传感器。根据方程式 1,传感器接收的回波脉冲的声压计算方法如下:

超声波接收机将接收到的声波转换为电信号。转换过程受到接收机灵敏度 (dB)的影响。1 µPa 声压产生 10 V 时,接收机灵敏度为 0 dB。因此,利用方程式 5和 6,可以把以 dB 表示的接收机灵敏度转换为 V/µPa。
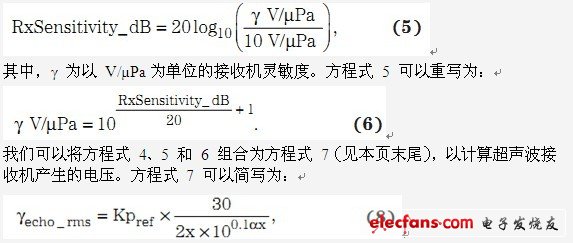
其中,增益(K)为一个常量。
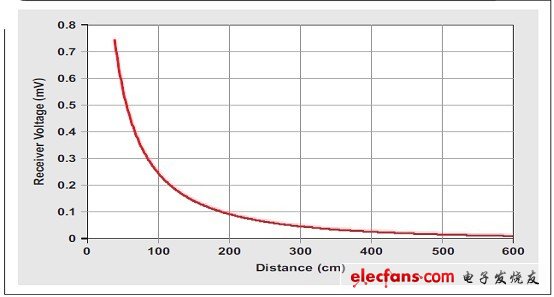
方程式 8 表明,随着物体到传感器的距离 x 增加,回波电压下降。换句话说,物体越靠近,回波振幅变大,而物体远离时,回波振幅变小。
图 2 表明,接收到的电压与物体到传感器的距离有关,假设参数取值情况如下:
30cm 距离时发射 SPL= 106 dB
l 空气吸收=1.3 dB/m
l 物体吸收=0 dB
l 接收机灵敏度=–85 dB
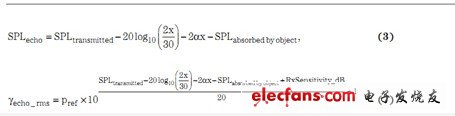
图 2 接收机电压为物体到传感器距离的函数
可变阈值方案
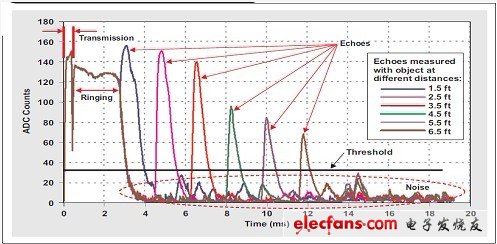
前一小节表明,从物体接收到的回波的振幅,会随物体到传感器的距离增加而减小。另外,由图1我们知道,回波处理路径的输入信号为u(t) = s(t) + η(t),其中s(t)为回波信号,而η(t)为输入相关噪声。换句话说,回波信号振幅不仅随距离增加而减小,并且会被噪声破坏,而回波处理系统只能通过处理回波信号来探测某个物体的存在。选择阈值时,一种常用的方法是阈值方案。使用这种方法时,阈值随时间而变化。特别是,超声波刚被发射出来时,阈值较大,之后,随着经过时间的增加而减小。这种方法的基本原理是,利用信号振幅的可预测衰变,确定阈值大小:越靠近物体,回波和阈值越大,从而实现物体探测。离物体越远,回波和阈值就越小。
图3描述了可变阈值方法的概念。该图显示了不同距离时物体回波解调举例。TI PGA450-Q1 评估模块的一个测试装置用于收集波形数据。该图显示了一种可能的阈值方案。
图 3 一个可能阈值方案的解调回波信号波形
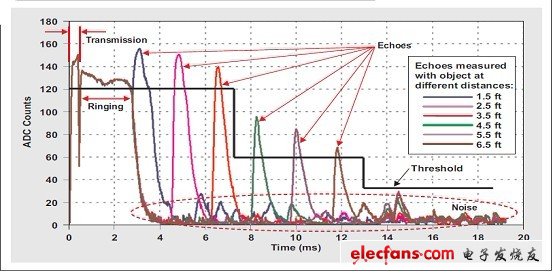
尽管这种可变阈值方案方法原则上有效,但它存在两个缺点:
1、可变阈值方案要求器件内部有存储器,以将时间与阈值关系存储至方案表中。如果阈值有 3 个可能的取值(如图 3 所示),则该表就会有 6 种可能的输入。另外,对于车载中使用的高级驾驶员辅助系统 (ADAS) 来说,用户需要输入多种可能的传感器安装位置,因为传感器可以安装于车载保险杠或者后视镜上任何位置。例如,如果一个传感器有 10 个可能的安装位置,那么器件就需要存储多达 60 个位置数据。这就增加了器件的成本,因为要求使用更多的存储空间。
2、在车载保险杠和反视镜上安装好传感器后,系统制造厂商会“校准”方案表。校准过程就是确定各个阈值,以及切换阈值的时间。这种校准通常是一项耗时费钱的工作,特别是一个表中需要多个输入数据时更是这样。
总之,可变阈值方案的主要缺点是,它增加了超声波测距系统的总成本。
固定阈值
可变阈值方法使用基于时间变化的阈值,与这种方法不的同是,固定阈值方法将信号噪声用作基线。系统噪声用于确定阈值,这样物体不存在就不对其进行探测。
另外,由图 1 我们知道,回波处理路径输入信号为 u(t) = s(t) + η(t)。回波信号是一系列载波频率 fc(t) 下的正弦波脉冲,其计算方法如下:

变量定义如下:
K=放大器增益
ηext(t)=外部噪声
ηamp(t)=放大器噪声
ηADC(t) = ADC电路噪声
q(t) = ADC量化
ηBPF(t) =BPF计算数学误差
各个噪声组成部分彼此不相关。另外,我们假设每个噪声组成部分为零平均值和非零方差高斯。
把方程式9和12代入方程式11后,BPF输出变为:
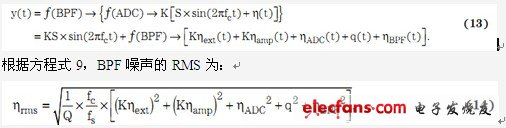
其中,Q 为 BPF 的品质因数,fs 为 ADC 采样频率,而所有噪声项均为 RMS值。知道方程式 14 所表示噪声的 RMS,并假设 6.6 波峰因数的情况下,所选阈值为:
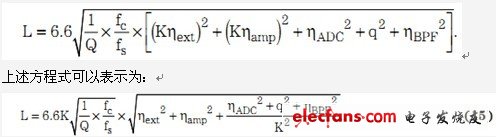
换句话说,我们可以利用方程式 15 选择固定阈值。图 4 显示了使用固定阈值的举例回波响应。
图 4 使用固定阈值处理回波数据
使用这种方法的一个明显优点是,它仅需要存储一个输入数据。如果一个传感器有 10 个可能的安装位置,只需总共存储 10 个输入数据便可。相比前面介绍的可变阈值方法,存储空间需求减少了 6 倍。请注意,如果放大器增益 (K) 改变,方程式 15 同样也提供了一种调节阈值的机制。
方程式 15 提供了一种确定阈值大小的分析方法。一般而言,需要利用噪声分析确定阈值大小。进行噪声分析的一种替代方法是,使用一个阈值对车载上安装的传感器进行校准。可将物体放置到传感器规定测距范围的最远处,然后完成测距校准。所选择的阈值需足够大,以在没有物体时超过处理后信号的噪声值,并确保仅在有物体时信号能够穿过该阈值。请注意,在使用这种方法选择阈值时,也应考虑 BPF 衰减。最后,为了提高物体探测系统的稳健性,信号的振幅必须在某段时间大于固定阈值。
关键字:固定阈值 超声波测距 车载应用
引用地址:固定阈值在超声波测距车载应用中的使用
在超声波测距车载应用中,例如:超声波泊车辅助 (UPA) 和盲点探测 (BSD) 等,系统发射的超声波被周围物体反射回来。系统接收反射波(回波),然后将物体的回波振幅与某个阈值比较,从而实现探测物体的目的。物体越靠近系统,其回波也越强。因此,阈值随时间而变化,是一种相对常见的情况。本文将向您论述,该阈值无需变化,可以保持固定不变。
超声波测距
小轿车中使用的高级驾驶员辅助系统 (ADAS) 便是一种超声波测距应用。安装在车载前后保险杠和后视镜上的超声波传感器发射出超声波,然后接收周围物体反射回来的超声波。超声波的传播时间(飞行时间)用于计算到物体的距离,从而帮助驾驶员泊车:寻找泊车点,或者探测驾驶员盲点区域内的物体。车载前后保险杠安装的传感器达到 4 个之多,另外,每个后视镜上还各装有一个传感器。
在超声波高级驾驶员辅助系统中,压电式传感器一般用于将电信号转换为超声波,然后再把反射回来的超声波转换为电信号。接受反射回波时,压电式超声波传感器的低接收机灵敏度通常会导致电信号非常微弱。
图 1 显示了用于处理回波电压的典型信号链。TI PGA450-Q1 是一款集成车载超声波传感器信号调节器,适用于 UPA 系统等应用。
图 1 使用回波处理探测物体的 ADAS

超声波接收机接收到的回波信号s(t)被噪声破坏。图 1 所示输入相关噪声η(t)为外部环境噪声和所有信号链组成部分的和,其与时间(t)相关。被破坏的信号 u(t) 经由放大器使用增益 K 放大,然后通过一个模数转换器 (ADC) 被数字化。数字化的 AM 信号经过一个带通滤波器 (BPF) 按线路传输。该滤波器主要用于改善信号的信噪比。把经滤波后的信号 y(t) 与阈值 L 比较,以探测某个物体的存在。BPF 的后面一般会有一个振幅解调器,其将信号转换为基带,以进行比较。但是,本文为了方便说明,我们忽略了这种解调器。因此,探测物体的关键是阈值 (L) 的选择。那么,我们如何选择 L 呢?
回波振幅
发射器产生的超声波为一系列载波频率下的正弦波脉冲,并以声压级 (SPL) 来描述。SPL 的计算方法如下:

其中,Prms 为 RMS 声压,而 pref 为基准声压。常用基准声压为 20 µPa,即 0.0002 µbar。
传感器对某个物体产生的超声波 SPL,取决于物体到传感器的距离。特别需要请注意的是,声压同距离成反比例关系:

其中,p 为声波压力,而 d 为物体到传感器的距离。超声波传感器规范说明了30cm 距离的 SPL。由该值,利用这一距离定律,我们便可以计算出任意距离 x的 SPL:

其中,x 为传感器和物体之间的距离,并且 x > 30 cm。因此,x 距离的 SPL 为:

也就是说,超声波从传感器传播到物体过程中,会损失声压。
声波从物体反射回来,返回到传感器,声压进一步损失。另外,由于空气和物体都会吸收一部分声压,所接收回波的 SPL 可以通过方程式 3 进行近似计算。具体方程式请见本页末尾处,方程式中 α 为空气吸收系数。请注意,空气吸收的 SPL 与声波在空气中传播的距离与正比。换句话说,SPL 损失与 x 成正比。我们使用因数 2,是因为声波在传感器和物体之间传播两次—一次从传感器到物体,一次从物体到传感器。根据方程式 1,传感器接收的回波脉冲的声压计算方法如下:

超声波接收机将接收到的声波转换为电信号。转换过程受到接收机灵敏度 (dB)的影响。1 µPa 声压产生 10 V 时,接收机灵敏度为 0 dB。因此,利用方程式 5和 6,可以把以 dB 表示的接收机灵敏度转换为 V/µPa。

其中,增益(K)为一个常量。
方程式 8 表明,随着物体到传感器的距离 x 增加,回波电压下降。换句话说,物体越靠近,回波振幅变大,而物体远离时,回波振幅变小。
图 2 表明,接收到的电压与物体到传感器的距离有关,假设参数取值情况如下:
30cm 距离时发射 SPL= 106 dB
l 空气吸收=1.3 dB/m
l 物体吸收=0 dB
l 接收机灵敏度=–85 dB

图 2 接收机电压为物体到传感器距离的函数

可变阈值方案
前一小节表明,从物体接收到的回波的振幅,会随物体到传感器的距离增加而减小。另外,由图1我们知道,回波处理路径的输入信号为u(t) = s(t) + η(t),其中s(t)为回波信号,而η(t)为输入相关噪声。换句话说,回波信号振幅不仅随距离增加而减小,并且会被噪声破坏,而回波处理系统只能通过处理回波信号来探测某个物体的存在。选择阈值时,一种常用的方法是阈值方案。使用这种方法时,阈值随时间而变化。特别是,超声波刚被发射出来时,阈值较大,之后,随着经过时间的增加而减小。这种方法的基本原理是,利用信号振幅的可预测衰变,确定阈值大小:越靠近物体,回波和阈值越大,从而实现物体探测。离物体越远,回波和阈值就越小。
图3描述了可变阈值方法的概念。该图显示了不同距离时物体回波解调举例。TI PGA450-Q1 评估模块的一个测试装置用于收集波形数据。该图显示了一种可能的阈值方案。
图 3 一个可能阈值方案的解调回波信号波形

尽管这种可变阈值方案方法原则上有效,但它存在两个缺点:
1、可变阈值方案要求器件内部有存储器,以将时间与阈值关系存储至方案表中。如果阈值有 3 个可能的取值(如图 3 所示),则该表就会有 6 种可能的输入。另外,对于车载中使用的高级驾驶员辅助系统 (ADAS) 来说,用户需要输入多种可能的传感器安装位置,因为传感器可以安装于车载保险杠或者后视镜上任何位置。例如,如果一个传感器有 10 个可能的安装位置,那么器件就需要存储多达 60 个位置数据。这就增加了器件的成本,因为要求使用更多的存储空间。
2、在车载保险杠和反视镜上安装好传感器后,系统制造厂商会“校准”方案表。校准过程就是确定各个阈值,以及切换阈值的时间。这种校准通常是一项耗时费钱的工作,特别是一个表中需要多个输入数据时更是这样。
总之,可变阈值方案的主要缺点是,它增加了超声波测距系统的总成本。
固定阈值
可变阈值方法使用基于时间变化的阈值,与这种方法不的同是,固定阈值方法将信号噪声用作基线。系统噪声用于确定阈值,这样物体不存在就不对其进行探测。
另外,由图 1 我们知道,回波处理路径输入信号为 u(t) = s(t) + η(t)。回波信号是一系列载波频率 fc(t) 下的正弦波脉冲,其计算方法如下:

变量定义如下:
K=放大器增益
ηext(t)=外部噪声
ηamp(t)=放大器噪声
ηADC(t) = ADC电路噪声
q(t) = ADC量化
ηBPF(t) =BPF计算数学误差
各个噪声组成部分彼此不相关。另外,我们假设每个噪声组成部分为零平均值和非零方差高斯。
把方程式9和12代入方程式11后,BPF输出变为:

其中,Q 为 BPF 的品质因数,fs 为 ADC 采样频率,而所有噪声项均为 RMS值。知道方程式 14 所表示噪声的 RMS,并假设 6.6 波峰因数的情况下,所选阈值为:

换句话说,我们可以利用方程式 15 选择固定阈值。图 4 显示了使用固定阈值的举例回波响应。
图 4 使用固定阈值处理回波数据

使用这种方法的一个明显优点是,它仅需要存储一个输入数据。如果一个传感器有 10 个可能的安装位置,只需总共存储 10 个输入数据便可。相比前面介绍的可变阈值方法,存储空间需求减少了 6 倍。请注意,如果放大器增益 (K) 改变,方程式 15 同样也提供了一种调节阈值的机制。
方程式 15 提供了一种确定阈值大小的分析方法。一般而言,需要利用噪声分析确定阈值大小。进行噪声分析的一种替代方法是,使用一个阈值对车载上安装的传感器进行校准。可将物体放置到传感器规定测距范围的最远处,然后完成测距校准。所选择的阈值需足够大,以在没有物体时超过处理后信号的噪声值,并确保仅在有物体时信号能够穿过该阈值。请注意,在使用这种方法选择阈值时,也应考虑 BPF 衰减。最后,为了提高物体探测系统的稳健性,信号的振幅必须在某段时间大于固定阈值。
上一篇:数据中心HA设计测试需求分析及全局HA测试方法
下一篇:简单介绍LTE测试技术的相关基础知识
推荐阅读最新更新时间:2024-03-30 23:25
超声波测距模块+AVR单片机控制程序
【超声波测距模块】-【机器人的耳朵】 #include avr/io.h #include avr/iom16.h #include util/delay.h int main(void) { DDRA=0x00; PORTA=0x00; //PA口初始化 DDRD=0xff; PORTD=0xff; //PD口初始化 char j,i; int h,u,l; while(1) { j=1; //激活while(j)循环 i=1; //激活while(i)循环 u=6000; //还原检测循环 PORTA&=(1 0); //PA0脚高电平 _delay_us(20); //延时20US
[单片机]
自动驾驶应用日益广泛,车载视频发展的如何?

随着自动驾驶汽车的应用日益广泛,需要更多汽车传感器的需求日趋明显。摄像头是推动自动驾驶汽车发展的关键传感器之一。随着新应用不断涌现,车载摄像头的数量也在迅速增加。此外,随着摄像头的应用从保有量较低的高档汽车转向更大的主流汽车市场,摄像头的采用率持续上升。图1显示了车用摄像头市场的快速增长。 图1. 车用摄像头市场。 这一增长趋势预计将持续到2025年以后。在不远的将来,装配多达20个摄像头的汽车将成为现实。 随着摄像头数量增加,对更高分辨率的需求也随之出现。分辨率提高主要由两个因素推动。第一个因素是需要支持更多的ADAS特性,因为需要更高的分辨率来实现更强大更准确的视觉探测功能。第二个因素是需要显示更高质量的图像,
[嵌入式]

超声波测距C语言程序
超声波则距 是很多 电子制作 爱好者比较喜欢的制作项目,下面的这款超声波测距C语言程序,超声波测距发送用的是反相器推挽输出,这样可以加大发射功率,超声波测距接收端用的CX20106A这个红外芯片接收40KHZ的方波,这是网上比较经典的模式,按照这个电路是挺容易成功的测量误差的问题 1m内应为mm级、2m内1cm左右、5m的时候3cm左右。下面的这款超声波测距C语言程序程序也挺简单的,用的定时器和外部中断,接收到回波的时候触发外部中断,在中断服务程序中进行处理,不用加注释应该能看懂吧,这款超声波测距C语言程序程序肯定还有很多不足,给初学者用用应该也可以吧。 #include #define unit unsigned int #d
[单片机]
LCD和OLED在车载显示中的应用
随着技术水平的提高,LCD开始越来越多地作为一种可配置的显示装置出现在汽车应用中。作为主要的用户界面,如何对其加以选择以保证适当的性能变得非常重要。汽车信息系统的复杂性和信息密度在日益上升,这使得汽车内部显示器不再仅仅是基本的集中仪表显示,而是要满足越来越详细和多样化的车内信息显示需求。
目前,市场对于能够同时显示文字和图形的高分辨率显示器的需求迅速增长。无源矩阵LCD(如TN-LCD或STN-LCD)和有源矩阵LCD(TFT-LCD)正在用于传送对驾驶员非常重要的基本驾驶信息(如速度计、里程表、发动机警告灯、驱动轮加载调节系统或4WD指示灯以及燃油表等)。除了这些主要信息以外,还有一些次要信息如外部温度指示、音频信息
[嵌入式]
基于单片机的超声波测距仪设计
摘要 STC89C52是STC系列单片机里应用比较广泛的一款,在自动控制领域里享有很高的价值,以其易用性和多功能性受到了广大电子设计爱好者的好评。本次设计主要是利用STC89C52单片机、超声波传感器完成测距报警系统的制作,以STC89C52为主控芯片,利用超声波对距离的检测,将前方物体的距离探测出来,然后单片机处理运算,与设定的报警距离值进行比较判断,当测得距离小于设定值时,STC89C52发出指令控制蜂鸣器报警。 1 绪论 1.1 项目研究背景及意义 由于超声测距是一种非接触检测技术,不受光线、被测对象颜色等的影响,较其它仪器更卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,具有少维护、不污染、高可靠、长寿
[单片机]
超声波测距测温的工作原理
超声波测距测温的工作原理是:超声波数字测距是利用超声波发射, 通过被测物体的反射回波接收后的时差来测量被测距离的,是一种非接触式测量仪器.因超声波在大气中的传波速度与温度有关,如0摄氏度时每秒为331.36米,20摄氏度时每秒为343.38米.因此该测距测温控制器采用了温度传感器DS18B20,把随环境温度变化的信号送入 单片机 ,MCU读取外界温度变化的数值后进行内部运算,并校正各种环境温度下测距的误差值,利用该功能方便地实现了测温显示. 使用超声波测距器利用了超声波在空气中传播特性,它有很多特点如: 测定物位距离时不接触被测物体,无活动部分,安装,调试简单,无维修,保养方便,测量精度高,作为物位测量控制器. 测量控制料位
[单片机]
超声波测距传感器模块HG-C40U工作程序图文详解
超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度,计算出模块到前方障碍物的距离。 超声波测距模块有好多种类型,目前比较常用的有URM37 超声波传感器 默认是232接口,可以调为TTL接口,URM05大功率超声波 传感器 测试距离能到10米,算是目前来说测试距离比较远的一款了,另外还有比较常用的国外的几款SRF系列的超声波模块,目前的超声波模块精度能到1cm。今天工采网小编为大家介绍一款新的超声波测距模块——韩国Hagisonic超声波测距传感器模块——HG-C40U及使用方法。 韩国Hagisonic 超声波测距传感器模块 - HG-C40U 超声波测距传感器模块 - HG
[传感器]
改进的双向启发式搜索算法及其在车载导航仪中的应用
摘要: 介绍单车辆路径规划的有关算法,针对车载导航仪的应用,对双向启动式搜索算法进行了改进和优化,提出了可靠有效的搜索终止条件和搜索切换标准,给出了改进算法的流程。最后给出了四种算法的实际测试和比较结果。结果表明改进的双向启发式搜索算法快速高速效。
关键词: 路径规划 启发式搜索算法 双向搜索算法
车载导航仪也称为车载定位和导航系统(Vehicle Location and Navigation System)。它的主要功能是利用全球定位(GPS)获取定位信息并与电子地图进行匹配,以决定车辆的当前集团并用图形化方式显示;按要求规划从出发地到目的地的最优驾驶路线;按照预先设定的路线
[传感技术]
 区间信号自动控制 (刘利芳)
区间信号自动控制 (刘利芳) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号