在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环境信息,以实现避障和导航,这必须依靠能实现感知环境信息的传感器系统来实现。视觉、红外、激光、超声波等传感器都在行走机器人中得到广泛应用。由于超声波测距方法设备简单、价格便宜、体积小、设计简单、易于做到实时控制,并且在测量距离、测量精度等方面能达到工业实用的要求,因此得到了广泛的应用。本文所介绍的机器人采用三方超声波测距系统,该系统可为机器人识别其运动的前方、左方和右方环境而提供关于运动距离的信息。
超声波测距原理
超声波发生器内部由两个压电片和一个共振板组成。当它的两极外加脉冲信号,且其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两极间未加外电压,当共振板接收到超声波时,就成为超声波接收器。超声波测距一般有两种方法:①取输出脉冲的平均电压值,该电压与距离成正比,测量电压即可测量距离;②测量输出脉冲的宽度,即发射超声波与接收超声波的时间间隔t,根据被测距离s=vt?2来得到测量距离,由于超声波速度v与温度有关,所以如果温度变化比较大,应通过温度补偿的方法加以校正。
本测量系统采用第二种方法,由于测量精度要求不是特别高,所以可以认为温度基本不变。本系统以PIC16F877单片机为核心,通过软件编程实现其对外围电路的实时控制,并提供给外围电路所需的信号,包括频率振动信号、数据处理信号等,从而简化了外围电路,且移植性好。系统硬件电路方框图见图1。
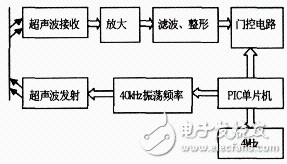
图1 系统硬件电路方框图
由于本系统只需要清楚机器人前方、左方、右方是否有障碍物,并不需要知道障碍物与机器人的具体距离,因此不需要显示电路,只需要设定一距离阀值,使障碍物与机器人的距离达到某一值时,单片机控制机器人电机停转,这可通过软件编程实现。
超声波发射电路
超声波发射电路以PIC16F877为核心,当单片机上电时,单片机从RA0口产生40kHz的超声波信号,但是此时该信号无法通过与非门进入放大电路使超声波发射头发射超声波,只有闭合开关S1时,从RA1口发射出一门控信号,该信号的频率为4kHz,同时启动单片机内部的定时器TMR1,开始计数。该门控信号每发射一个周期的波形,超声波就会发射10个完整的波形,这可由它们的频率得出。超声波的周期为1(40kHz)=01025ms,而门控信号的周期为1(4kHz)=0125ms。最后根据s=vt2求出障碍物与移动机器人的距离。当超声波接收头收到反射回来的超声波时,计数器停止计数,时间t 可以根据计数器的计数与门控信号的周期求出。RA2口接RS触发器,RS触发器可以自动控制超声波的发射和停止。本系统的电路还包括人工复位电路,由单片机的MCLR引脚接S2来控制,超声波发射电路图见图2。
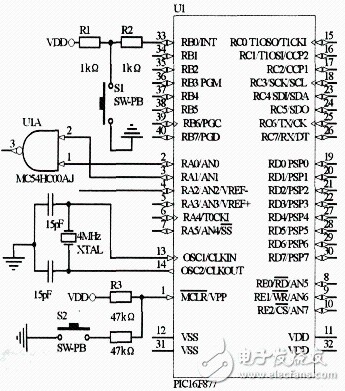
图2 超声波发射电路图
门控电路(RS触发器)
为实现对超声波发射和接收的自动控制,须在电路中加一门控电路,该门控信号频率为4kHz,如把输出脉冲作为闸门信号,让已知频率fc的脉冲恰好通过闸门,那么t=NTc,其中,Tc为已知脉冲的周期,N为脉冲的个数。门控电路由RS触发器组成,当输入端R=1(S=0)时复位,即输出端Q=0;当R=0(S=1)时置位,即Q=1。RS触发器与单片机的RA2口相连。
超声波放大电路
超声波放大电路由三极管等组成,由于单片机RA口最多只有20mA~25mA上拉电流,而超声波发射器最小需要60mA的电流,所以在与非门后加一级放大电路来放大电流,以完成超声波的发射。超声波放大发射电路见图3。
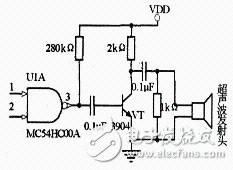
图3 超声波放大发射电路图
超声波接收放大电路
由于超声波接收头接收到的超声波信号很微弱,所以在其后需加一超声波接收放大电路。该电路采用两个集成运放,设计为两级,两级都为同相输入,因为同相输入的电压放大倍数为1+RfR,所以每一级的放大倍数为10,两级放大倍数接近100倍,这样后续电路就可以很容易地检测到输入的信号。集成运放采用双电源供电,超声波接收放大电路见图4。
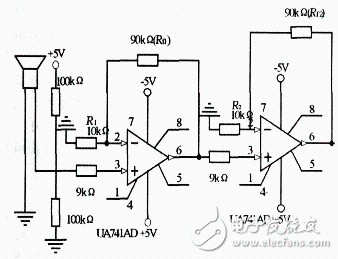
图4 超声波接收放大电路图
信号滤波电路
从信号放大电路出来的声波带有一定的干扰,为了去除干扰信号,需要一滤波电路,信号滤波电路选用带通滤波器电路,使其中心频率为40kHz、带宽为2kHz,外加一过零比较器,使输出信号转化为方波信号。信号滤波电路见图5。
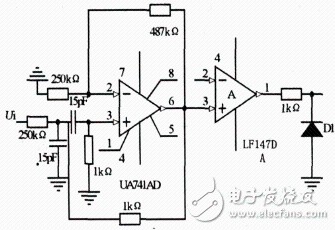
图5 信号滤波电路图
信号整形电路
从信号滤波电路出来的方波信号很不规则,故其后加一整形电路,整形电路由两级非门串联,并联一电阻组成,整形后再送单片机进行处理,信号整形电路见图6。
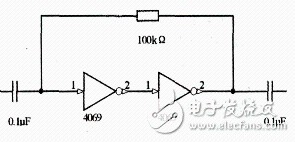
图6 信号整形电路图
本文设计的超声波测距系统采用了单片机编程技术,配合硬件完成了系统的要求,其精度能满足大部分的工程需要。与传统的测距系统相比,具有结构简单、价格便宜、移植性好等特点。
引用地址:
超声波测距电子电路设计详解
推荐阅读最新更新时间:2024-03-30 23:28
如何提高电子电路抗干扰能力
作为一个电子设计制作者与爱好者在设计带微处理器的电子产品时,如何提高系统的抗干扰能力和电磁兼容性是设计者必需考滤的一个问题。本人就自己在电子设计制作过程中积累的一点经验供大家参考。 一、减小来自电源的噪声 电源在向系统提供能源的同时,也将其噪声加到所供电的电源上。电路中微控制器的复位线,中断线,以及其它一些控制线最容易受外界噪声的干扰。 电网上的强干扰通过电源进入电路。即使电池供电的系统,电池本身也有高频噪声。模拟电路中的模拟信号更经受不住来自电源的干扰。因此设计电源时要采取一定的抗干扰措施:(如输入电源与强电设备动力线分开;采用隔离变压器;采用低通滤波器;采用独立功能块单独供电等)。
[模拟电子]
基于换能器解卷积的高精度超声波测距系统
摘要: 针对窄带超声换能器对测距精度影响,采用基于横向滤波器的解卷积处理方法扩展了接收信号带宽,并利用LMS算法进行解卷积滤波器的构造。实验结果表明,这种处理方案有效提高的系统的测距精度。
关键词: 超声波测距 解卷积 LMS算法
超声测距系统由于具有不受光线烟雾影响、抗电磁干扰能力强、距离信息直观、成本低、使用方便等特点,广泛应用于液位物位测量、位置角度跟踪、移动机器人定位等场合 。为了进一步用于需要高的测距、定位精度的场合,国内外提出了多种高精度超声波测距处理方法 。这些处理方法更多地针对接受到的超声信号,没有考虑到超声换能器对测距精度的影响。在“移动机器人超声导航传感器” 和863项目“超
[嵌入式]
MC9S12XS128实现超声波测距
参考代码: 开发环境:Freescale Codewarrior 5.0 /* * Authour: flyreally * *自己写的一个超声波测距的模块,用查询方式做的, *当然也可以用中断了 * */ #include hidef.h /* common defines and macros */ #include MC9S12XS128.h /* derivative information */ #pragma LINK_INFO DERIVATIVE mc9s12xs128 /*可以通过更改TIMER的值来实现不同时间的定时, 定时长为TIMER *
[单片机]
金属电子释放实现阿秒范围测控,或将电子电路速度加快100万倍
光电效应。图片来源:“科学和数学空间”网站 据《自然》杂志26日报道,德国埃尔朗根—纽伦堡大学、罗斯托克大学和康斯坦茨大学的物理学家证明:通过叠加两个不同强度和频率的激光场,可以测量金属的电子释放并将其精确控制到几阿秒。这些发现可能会带来新的量子力学见解,并使电子电路的运行速度比现在的快100万倍。 激光技术的发展为光电效应的研究带来新动力。此前,科学家们只能在阿秒范围内确定气体中激光诱导的电子动力学。现在,研究团队首次实现在固体上测量和控制阿秒范围内金属的电子释放。 研究团队使用了一种特殊的策略:不仅使用强激光脉冲,将电子释放到钨尖端,还使用了频率为两倍的较弱激光。研究人员解释说,原则上,在非常强的激光下,电子的
[半导体设计/制造]

51单片机超声波测距模块
//晶振=8M //MCU=STC10F04XE //P0.0-P0.6共阳数码管引脚 //Trig = P1^0 //Echo = P3^2 #include reg52.h //包括一个52标准内核的头文件 #define uchar unsigned char //定义一下方便使用 #define uint unsigned int #define ulong unsigned long //*********************************************** sfr CLK_DIV = 0x97; //为STC单片机定义,系统时钟分频
[单片机]
基于超声波测距的倒车雷达系统设计
1 引言 近年来,随着汽车产业的迅速发展和人们生活水平的不断提高,我国的汽车数量正逐年增加。同时汽车驾驶人员中非职业汽车驾驶人员的比例也逐年增加。在公路、街道、停车场、车库等拥挤、狭窄的地方倒车时,驾驶员既要前瞻,又要后顾,稍微不小心就会发生追尾事故。据相关调查统计,15%的汽车碰撞事故是因倒车时汽车的后视能力不良造成的。因此。增加汽车的后视能力,研制汽车后部探测障碍物的倒车雷达便成为近些年来的研究热点。安全避免障碍物的前提是快速、准确地测量障碍物与汽车之间的距离。为此,设计了以单片机为核心,利用超声波实现无接触测距的倒车雷达系统。 2整体设计及原理 超声波一般指频率在20 kHz以上的机械波,具有穿透性强,衰减小,反射能力
[嵌入式]
一种创新型汽车电子电路保护设计
汽车电子是当前一个热门开发领域,中国汽车市场的蓬勃发展为本土汽车电子产业带来了新的机遇。越来越多的企业纷纷加大了在汽车电子产品上的投入力度,包括ECU、ABS、DVD、GPS、HVAC、CANBUS等在内的大量汽车电子产品的本土化设计制造厂商如雨后春笋般冒升,这也为从事电路保护设计的电子元器件厂商开辟出一片崭新的天地。 安全、可靠性至关重要 保险丝是一类被动无源器件,类似一个开关。当产品出现故障或者发生意外时,需要保险丝能够安全地在电源部分实现有效的断开,不产生明烟/明火,更不能危及操作人员的生命安全。因此,无论任何电子产品,通常无一例外都要配置保险丝,它也是电子产品安全的保障。 对于保险丝而言,最主要的参
[汽车电子]
超声波测距数码管显示程序
//超声波模块显示程序 #include reg52.h //包括一个52标准内核的头文件 #define uchar unsigned char //定义一下方便使用 #define uint unsigned int #define ulong unsigned long sbit Tx = P3^3; //产生脉冲引脚 sbit Rx = P3^2; //回波引脚 uchar code SEG7 ={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};//数码管0-9 uint distance ; //测距接收缓冲区 uchar ge,shi,bai,temp,fla
[单片机]







 模拟电子技术基础(第三版) (王远)
模拟电子技术基础(第三版) (王远) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号