速度测量是控制工程的基本问题之一。在许多情况下,测速信号需要远距离传送。实现这个问题的一个主要方法是使用SoC(片上系统)芯片。它所带的丰富外设改变了关于硬件和软件的观念。搭建硬件系统变为对硬件结构的理解掌握,软件的编程也从算法编制为主变为部件设置为主,具有简捷、完整的特点,体现了芯片的技术优势。SoC类的TMS320LF2407DSP芯片在测速和远程传送应用中的简捷一体化设计也体现了这一点。
1 相关系统结构
TMS320LF2407所带有的事件管理器和CAN控制器模块为测速和远程传送提供了便利。 TMS320LF2407有2个事件管理器EVA和EVB,各有3个捕获单元。对应6个捕获输入引脚CAPX(对EVA,X=1,2,3;对EVB,X=4,5,6)。6个捕获输入引脚分别与QEPl/IOPA3、QEP2/IOPA4、IOPA5、QEP3/IOPE37、QEP4/IOPFO和IOPFl 共用。当捕获输入引脚CAPX上检测到所选的跳变时,所选的GP定时器的计数值被捕获并存入到一个2级深的FIFO堆栈中。
TMS320LF2407的CAN控制器模块包括有邮箱和相应的控制/状态寄存器。共有6个邮箱:2个接收邮箱(MBOX0、1),2个发送邮箱(MBOX4、5),2个可配置为接收或发送邮箱(MBOX2、3)。TM$320LF2407的CAN控制器模块完全支持CAN2.0B协议。
通常情况下,测速传感器系统输出的是数字测速脉冲信号。因此,可把这个加到TMS320LF2407DSP芯片捕获引脚上。利用TMS320LF2407芯片的捕获单元测量输入脉冲的周期,再由内置的CAN总线控制器单元发出CAN周期信号,实现测速和远程传送一体化。
2 系统配置
2.1 捕获单元及相应定时器的配置
TM$320LF2407捕获单元的工作原理是:以输入脉冲上升沿、下降沿或上升沿下降沿为界,由相应的定时器计数来度量周期,计数值被捕获送入相应的一个2级深的捕获堆栈FIF0中。因此,涉及到捕获和定时器两部分的配置操作。需要配置的捕获操作有:在I/O口复用控制寄存器MCRx(x=A、B或c)中把相应引脚配置为捕获输入;在捕获控制寄存器CAPCONA/B中选择(使能)捕获单元、选择(使能)相应的定时器和边沿选择(上升沿、下降沿或上升沿下降沿);在中断标志寄存器EVA/BIFRX和中断屏蔽寄存器EVA/BIMRX中设置中断控制情况。需要配置定时器的操作有:对单个通用定时器TXCNT清零;在全局通用定时器控制寄存器GPTCONA/B中设置相应定时器的操作及计数方向;在单个通用定时器周期控制寄存器TXPR中设置比较周期;在单个通用定时器控制寄存器TXCON中设置计数操作模式。
周期控制寄存器TXPR中设置的比较周期应大于输入脉冲信号的周期。在不知道输入脉冲信号周期的情况下,应设置为最大值。当度量周期超过最大捕获时间时,用定时器溢出的方法再加软件计数解决。
2.2 捕获周期的取出和传送
存放于捕获堆栈FIFO的捕获周期的取出有中断和查询两种方法。捕获单元所在的事件管理器的中断延时时间为20个CPu周期(典型),或25个CPU周期(最小保护),或8个cPU周期(单个中断),或l6个CPU周期(不考虑存储器空间)。在具体设计中,中断延时时间被设为某一定值。在通常中断处理程序很短的情况下,中断时间主要由中断延时时间决定。为了系统的扩展,即使是单个外设,也还是以采用中断方法为宜,而不是查询方法。
2.3 CAN控制器模块和位定时器配置
CAN控制器模块的配置包括初始化邮箱、位定时器设置和数据收发。有关内容参见文献[1]。这里介绍一下位定时器的设置。
位定时器的设置决定总线传输信号的波特率,是CAN控制器模块的核心配置问题。TMS320LF2407有两个位控制寄存器BCRl和BCR2。它们必须在CAN控制器处于复位模式下(即CCR=1)才能被配置。位控制寄存器BCR2包括波特率预分频位BRP[7-0],用来确定CAN控制器的时间片TQ,作为位控制的基准时间。位控制寄存器BCR2包括同步跳转宽度选择位SJW[1-0]、采样次数选择位SAM[7]、包含传播延时时间段(PROG SEG)和相位延时时间段1(PHASE SEGl)的时间段1 TSEGl[3-0]、决定相位延时时间段2(PHASE SEG2)的时间段2 TSEG2[2-0]。
3 设计实例
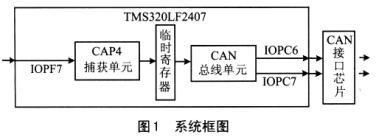
本例的基本设置是选定捕获单元4(CAP4)对输入脉冲宽度进行捕获,事件管理器EVB的通用定时器3对脉冲进行计数。捕获计数值从FIFO堆栈取出送到临时寄存器CAP4TEMP,以便于扩展。再从CAP4TEMP送到3号邮箱经CANTX/IOPC6和CANRX/IOPC7发送,如图1所示。
3.1 捕获单元为中断方式而CAN控制器为查询方式
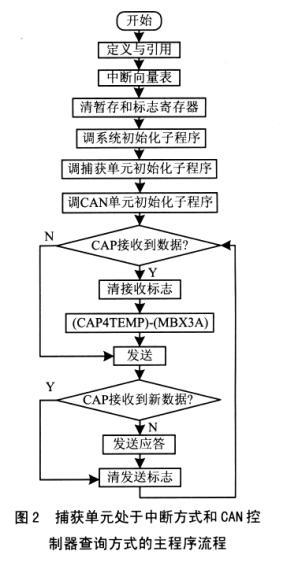
首先进行系统初始化,包括关中断、清标志位、系统时钟20MHz使能包含有捕获单元的第4级中断INT4,再进行捕获单元初始化和CAN控制器初始化。有关内容前已叙述。由于捕获单元处于中断方式,从捕获堆栈FIFO的取捕获周期值的操作在捕获单元的中断处理程序中进行;而CAN控制器处于查询方式,要在主程序中循环检查捕获标志。确认捕获后,从暂存寄存器CAP4TEMP中取出捕获周期值送到邮箱3。值得一提的是,由于捕获周期值为1 6位数据,故需要传送的数据是2字节。因此发送控制器MSGCTRL3的DL=2。这种情况的程序流程如图2所示。
3.2捕获单元中断处理包括CAN控制器的信息发送
如前所述,当CAN控制器处于查询方式时,CAN控制器的操作程序很复杂,又位于主程序,不利于主程序的扩展和外设的增加;因此可以把CAN控制器信息发送设置于捕获单元中断处理中,使主程序变得十分简单。在这种情况下,捕获单元中断处理程序同时包括捕获周期取出和CAN信息发送。由于减少了判断和循环,CAN信息发送变得简单。捕获单元中断处理程序如下:
CAP4_ISR
LDP #DP EVB
LACL CAP4FIFO ;取捕获堆栈值
LDP DP_USER
SACL CAP4TEMP ;捕获值送入临时寄存器
LDP #DP EVB
SPLK #0,T3CNT ;清T3计数值,使其重新计数
LDP #DP_CAN
SPLK #0000H,MDER ;邮箱不使能
SPLK #0100H,MCR ;CDR=I,数据改变请求
LDP #5
LACL CAP4TEMP ;取捕获值
LDP #DP_CAN2
SACL MBX3A ;把捕获值移入到邮箱3
LDP #DP_CAN
SPLK #0880H,MCR ;DBO=1,CDR=0,ABO=1,STM=0
SPLK #08H,MDER ;MD3=0,ME3=1,邮箱3发送使能
LDP #DP CAN
SPLK #0020H,TCR ;邮箱3发送请求
W_TA3 LDP #DP_CAN
BIT TCR,2 ;邮箱3发送应答TA3(位13)=1
BCND W_TA3, NTC ;等待发送应答
LDP #DP_CAN
SPLK #2000h, TCR ;发送应答TA3写1复位
CLRC INTM ;开中断
RET
4 结论
分析和设计表明,利用SoC芯片类的TMS320LF407特点,适当配置相应的单元,就会简捷、有效地实现速度更快的控制功能,体现了控制功能,体现了控制实现方法的必然发展趋势。调试应用说明,该方法正确、有效。
上一篇:由AT89C51/55构成的温湿度自动监测系统
下一篇:基于超声波传感器的测距系统设计
推荐阅读最新更新时间:2024-03-30 22:03

 功率变换器和电气传动的预测控制
功率变换器和电气传动的预测控制 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号