抖动基本理论简介
光纤通道标准把抖动定义为“对事件理论定时的偏离”。抖动从根本上描述了系统的定时误差,它基本有两种类型:确定性抖动和随机性抖动。
确定性抖动(DJ)定义为具有非高斯概率密度函数的抖动。确定性抖动表现为时间边界,有一定的产生原因:占空比失真(由上升沿和下降沿的时差产生)、EMI、串扰、接地和电源供电问题等。确定性抖动一般采用边界的峰值表示。
随机性抖动(RJ)定义为具有高斯概率密度函数的抖动。随机性抖动不受振幅的限制,由RMS (均方根)值表示,它是均值等于零时的标准方差。随机性抖动的主要来源是系统元件的高斯热噪声(白噪声)。例如,比较器中,热噪声和摆率相互影响,在输出切换点产生定时误差。
确定性和随机性抖动之和或卷积后得到总抖动(TJ),它一般表示为测量峰值。将随机性抖动的RMS值转换为峰值引入了误码率(BER)的概念。对于高斯概率密度函数,峰值在理论上意味着无穷大的振幅。然而,通过选择极端峰值的概率或总抖动超过抖动预算时产生误码的概率,可以由RMS值计算得出实际的峰值。例如,小于10-12的峰值随机性抖动是RMS值的14.1倍。表1列出了峰值和RMS随机性抖动与BER的关系。
表1. 峰值和RMS随机性抖动与BER的关系

测量MAX999的抖动
某些应用中,MAX999等高速比较器用来对输入正弦波进行整形,产生时钟信号。由于比较器的输出抖动决定了时钟抖动,因此,掌握比较器的抖动指标非常重要,以便准确计算时钟抖动。
本应用笔记利用图1所示电路测量MAX999的输出抖动。通过小电阻分配网络,将反相输入端连接至固定的2.5V基准电压,选择较小的100Ω电阻是为了降低噪声。同相输入通过BNC连接器连接至HP8082A脉冲发生器,靠近同相端安装了一个50Ω匹配电阻。
通过一个200Ω串联电阻和一个SMA连接器,将MAX999输出连接至Tektronix CSA8000信号分析仪。200Ω串联电阻和CSA8000的50Ω输入阻抗构成了一个分压网络,将CSA8000的输入信号衰减至略小于1VP-P。因此,该信号在仪表的最大输入范围之内。在电源以及比较器反相输入的2.5V基准处放置旁路电容。

图1. 测量MAX999比较器输出抖动的电路
CSA8000的随机性抖动规定为1.0ps RMS (典型值)和1.5ps RMS (最大值)。HP8082A脉冲发生器定义输出抖动为周期的0.1% + 50ps (峰值)。选择输出频率为80MHz,输出摆幅为1VP-P (终端匹配50Ω),中心点为2.5V。将脉冲发生器和CSA8000直接连接,能够测量7.7ps RMS的抖动。
送入上述输入信号时,图1电路可测量11.2ps的RMS抖动。考虑到电路的简单结构、严格的电源滤波和较低的EMI环境,可以假设MAX999和外围元件引入的主要抖动是随机性抖动。
假设脉冲发生器引入的抖动和MAX999的抖动不相干,可以根据式1估算后者的抖动:
(RJ_PG)2 + (RJ_MAX999)2 = (RJ_MEAS)2(式1)
图2提供了式1的参数。
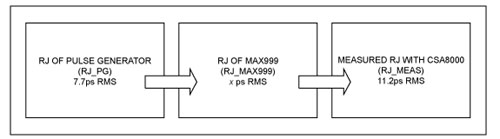
图2. 按照这一流程图,可以推导出MAX999的抖动。已知HP8082A脉冲发生器有7.7ps RMS,在CSA8000测量到11.2ps RMS,利用式1推算MAX999的抖动。
从该式可以确定MAX999的RMS随机性抖动为8.1ps。
抖动测量的基本假设以及误差源
8.1ps RMS是对MAX999实际抖动的估算,如上所述,这一估算基于一定的假设条件,并受以下误差源的影响:
CSA8000的1ps RMS抖动对测量产生影响,导致9%的不确定性。
假设MAX999的抖动只与比较器本身以及周围电阻的热噪声的随机抖动有关,忽略了确定性抖动。
忽略了两个在MAX999反相输入提供2.5V电压的100Ω电阻的噪声(0.9nV/),假设由并联电容构成的7kHz低通滤波器滤掉。
200Ω输出串联电阻产生的噪声(1.8nV/)可能会形成另一误差源,因为它不受带宽的限制。但是,在下一节的讨论可以看出,与MAX999相比,它的影响也可以忽略。
HP8082A脉冲发生器的抖动和MAX999的抖动不相干。
抖动和噪声的关系
随机性抖动是由MAX999和电阻热噪声(白噪声)引起的。请参考应用笔记3631:随机噪声对时序抖动的影响—理论与实践,了解随机性抖动和输入白噪声在放大器中相互作用的背景。在切换点,比较器和放大器的作用相似;特别是,比较器增益级使得两路输入不平衡时导致输出切换。应用笔记3631说明了随机性抖动的RMS值和白噪声与输入(正弦)信号摆率有关,由式2表示:
JitterRMS = VnRMS/SR(式2)
HP8082A脉冲发生器带宽有限,使得80MHz脉冲表现为正弦波。对于正弦波,由式3给出接近过零点的摆率:
SR = A × 2 × π × f (式3)
其中,A是正弦波的振幅(本例中为0.5V或1VP-P),f是频率(本例中为80MHz)。由此得出摆率大约为250V/μs = 250μV/ps。可以采用式4计算80MHz输入导致的电压噪声:
VnRMS = 250μV/ps × 8.1ps = 2025μVRMS(式4)
200Ω串联电阻在同一带宽内产生的噪声为14.3μVRMS,可以忽略。因此,总的随机噪声主要来自MAX999本身。
结论
在某些应用中,采用比较器对高速正弦信号进行整形,以产生时钟信号,因此,了解比较器输出抖动指标非常重要。本应用笔记介绍了在使用非理想信号发生器时,怎样推导MAX999的输出抖动,讨论了测量限制及其误差源。最后,得出了输出抖动与输入参考电压噪声的关系。
上一篇:8位LED显示40NHz频率计芯片NB8216D
下一篇:红外线人体测温仪电路的设计
推荐阅读最新更新时间:2024-03-30 22:05

 功率变换器和电气传动的预测控制
功率变换器和电气传动的预测控制





- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况




 京公网安备 11010802033920号
京公网安备 11010802033920号