1. 引言
在DKSZ-1电机控制实验装置基础上增加以单片机为控制核心的数字控制器,实现了直流数字双闭环调速系统控制。
2. 系统的组成
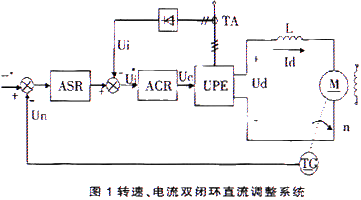
调速系统中设置了两个调节器,分别调节转速和电流。结构原理图如图1所示,图中符号的意义分别为:ASR-转速调节器;ACR-电流调节器;TG-测速发电机;TA-电流互感器;UPE-电力电子变换器U*n;-转速给定电压;Un-转速反馈电压;U*i-电流给定电压;Ui-电流反馈电压。
3. 电流环与转速环的设计
经过测量计算,确定系统的基本参数如下:直流电动机:Un=220V,1.16A,1500r/min,Ce=0.15,λ=1.3
晶闸管装置放大倍数:Ks=63.3
电枢回路总电阻:R=41.14Ω
时间常数:Tm=0.04s.TL=0.028s
电流反馈系数:β=3.3/λInom=3.3/1.5=2.188
转速反馈系数:α=2.5/1500=0.0017
稳态指标:静差率小于5%,D>10
3.1 电流环的设计
3.1.1 确定时间常数
①整流装置滞后时间常数:三相桥式电路的平均失控时间Ts=0.0017s。
②电流滤波时间常数:
由于主回路的电流是脉动直流,为了能取得电流的平均值,可采用多次采样取平均值等数字滤波方法,但考虑到系统的CPU时序安排紧张,决定采用加硬件滤波环节的办法,但其时间常数应该取得小一些,取
③电流环小时间常数 
按小时间常数近似处理,取
3.1.2 选择调节器结构
电流环按I型系统设计,电流调节器选用PI调节器,其传递函数为:
3.1.3 计算各调节器参数:
ACR超前时间常数: 。电流开环增益:按δI%≤5%,应取
。电流开环增益:按δI%≤5%,应取 ,因此:
,因此:
则ACR的比例系数为:
3.1.4 校验近似条件
电流环截止频率Wci=KI=178.57/S
晶闸管整流装置传递函数近似条件Wci≤1/3Ts
现在, ,满足近似条件。
,满足近似条件。
忽略反电动势对电流环影响的条件 现在,
现在, ,满足近似条件。
,满足近似条件。
小时间常数近似处理条件 : 现在,
: 现在,  ,满足近似条件。
,满足近似条件。
3.2 转速环的设计
3.2.1 确定时间常数
①电流环等效时间常数为
②转速滤波时间常数Ton
外加转速滤波环节,取
③转速环小时间常数
按小时间常数处理,取:
3.2.2 选择调节器结构
按典型II型系统设计转速环,ASR选用PI调节器,其传递函数为
3.2.3 计算转速调节器参数
按跟随和抗扰性能都较好的原则,取=5,则ASR的超前时间常数为: 转速环开环增益:
转速环开环增益:
于是,ASR的比例系数为:
3.2.4 验近似条件
转速环截止频率为 电流环传递函数简化条件:
电流环传递函数简化条件:
现在  满足简化条件。
满足简化条件。
小时间常数近似处理条件:
现在:  ,满足近似条件。
,满足近似条件。
4. 采样周期选择及PI控制算法
4.1 采样周期选择
根据采样定理,必须使采样频率Ws≥2Wmax,以便采样后的离散信号不会失真,ws=2π(1/Ts),为采样角频率; wmax=2πfma为信号最高角频率。按采样定理可以确定采样周期的上限值:Ts≤π/Wmax;
实际应用中,常按一定的原则,结合使用经验来选择采样周期Ts:Tmin≤Ts≤Tmax。
在一般情况下,可以令采样周期,  或用采样角频率Ws≥(4~10)Wc,Wc为控制系统的截止频率。由双闭环的设计参数知:
或用采样角频率Ws≥(4~10)Wc,Wc为控制系统的截止频率。由双闭环的设计参数知:

4.2 PI控制算法
当输入误差函数e (t),输出函数是u (t)时,PI调节器的传函: ;则,u (t)和e (t)关系的时域表达式可写成:
;则,u (t)和e (t)关系的时域表达式可写成:
其中,KP=KPI,为比例系数;  为积分系数。将上式离散化成差分方程,其第k拍输出为:
为积分系数。将上式离散化成差分方程,其第k拍输出为:
5. MATLAB仿真建模与波形分析
电流调节器和转速调节器仿真模型分别采用I型和Ⅱ型系统,所用数据为按工程方法计算的参数,并根据经验略作调整,MATLAB仿真波形如图4所示。
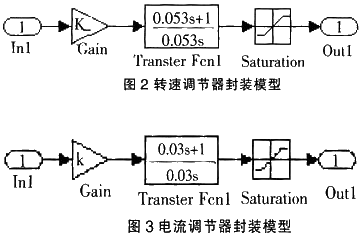
从图4中可以看出,由于负载增大,使电枢电流出现一个小的数值增大的波动后,达到新的负载电流状态的稳定值,这个稳定值与负载增加前相比,数值变大。
由图5和图6得:突然给定电压U*n时,Un很小,所以△Un很大,ASR很快饱和,输出为最大值,电枢电流线形增加,当r>n*时,Un>U*n那么△Un变极性,ASR退饱和,转速负反馈投入运行,直到n=n*。

综上所述,起动电流根据电机起动波形,可以看到速度与电流之间的关系与理论情况基本相同。
6. 实验波形及分析
(1) 电机突加最大给定时,转速波形如图7。由于测速发电机性能的影响,使得超调现象不明显。
由图7可知,转速起动波形与SIMULINK仿真所得波形一致,达到了预期的效果。

(2) 电枢电流波形
电枢电流波形在突加给定时,在双闭环的作用下迅速上升,迫使电动机快速起动,然后迅速回落直到等于负载电流。
在图8,因为测速发电机性能和晶闸管驱动环节死区电压的影响,使得电枢电流没有恒流阶段。但波形与SIMULINK仿真所得波形趋势一致,达到了预期的效果。


上一篇:基于Nios软核的CT机扫描系统控制器设计
下一篇:采用PCI9052设计PCI总线运动控制卡
推荐阅读最新更新时间:2024-05-13 18:35

 汽车交流发电机原理详细介绍
汽车交流发电机原理详细介绍 21年电赛题目合集
21年电赛题目合集 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南










 京公网安备 11010802033920号
京公网安备 11010802033920号