系统功能及应用
本系统主要完成将智能车行驶过程中的各种状态信息(如传感器亮灭,车速,舵机转角,电池电量等)实时地以无线串行通信方式发送至上位机处理,并绘制各部分状态值关于时间的曲线。有了这些曲线就不难看出智能车在赛道各个位置的状态,各种控制参数的优劣便一目了然了。尤为重要的是对于电机控制PID参数的选取,通过速度一时间曲线可以很容易发现各套PID参数之间的差异。对于采用CCD传感器的队伍来说,该系统便成为了调试者的眼睛,可以见智能车之所见,相信对编写循线算法有很大帮助。而且还可以对这些数据作进一步处理,例如求取一阶导数,以得到更多的信息。 系统的硬、软件设计
设计方案主要分成三部分:车载数据采集系统,无线数传系统,上位机数据处理系统。系统基本构建如图1所示。

车载数据采集系统
车载数据采集系统主要由单片机负责采集赛车行驶过程中的速度、传感器状态、电池电压、舵机转角等信息。为了使监测系统不占用S12单片机的内部资源并且支持热插拔,我们将除供电之外的监测系统与智能车控制系统相分离。我们选择ATMEL公司的ATMEGA16单片机作为该数据采集系统的处理器。二值型光电传感器信号的采集直接使用该单片机的I/O口进行采集,连续型光电传感器、电池电压及CCD摄像头信号则采用该单片机的A/D口进行采集,速度信息则通过光电编码器和该单片机的计数器来采集。采集到的数据每20ms向上位机发送一次。
无线数传系统
下位机向上位机传输的是以每20ms传输一组包含了光电编码器值(speed),电池电压(battery),舵机转角值(angle),传感器当前状态(sensor)的数据,如果是在理想状态下,上位机接收到的应是上述各值循环出现的周期性数据,此时上位机只需将这些数据按顺序装入各自的数组并画图即可。但在实际的无线传输过程中可能出现数据丢失现象。因此加入适当的数据校验是必要的,否则会出现数据装入错误,造成画图的混乱。我们在实际过程中是在每组数据中加入0x00,0xff的帧头,当数据出现错误时,则舍弃该帧数据。
数据的无线收发部分采用的是SUNRAY公司的QC96型无线收发模块,该模块可以收发波特率为9600bps的串行数据,距离可达100m。
上位机的数据接收及处理
上位机部份主要由四个模块构成:
·数据接收模块
功能:上位机通过串口采集下位机发送的原始数据。
实现:VC++中实现串口通信一般有二种方式,分别是MSComm控件和Windows API函数。MSComm简洁易用,适用于比较简单的系统,Windows API函数应用较广但比较复杂繁琐,由于此模块的串口通信功能相对简单,本系统采用前者。在实际过程中使用的是事件驱动的方式,这种方法响应及时,可靠性高,并且比查询法占用更少的资源。
·存储模块
功能:可直接存储采集到的原始数据,以备以后更多的分析处理。
实现:在每个OnComm事件被触发后,将串口接收到的数据直接存入temp临时文件,并且可以在用户的要求下将temp临时文件里的值存储到指定文件。
·数据的分析和处理模块
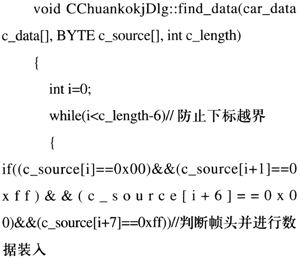
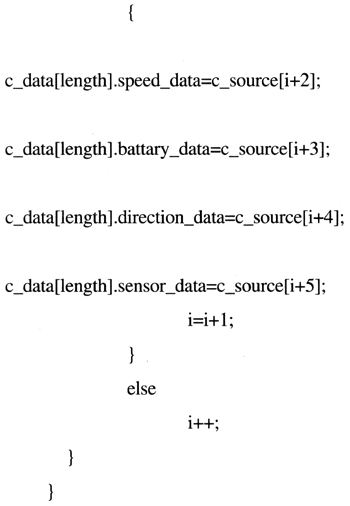
功能:将采集到的原始数据进行用户选定的分析和处理,主要包括丢弃错误数据,以及去除帧头并进行数据装入任务,同时也可以对已保存的数据进行分析和处理。
实现:将temp临时文件或用户指定文件的数据读出并装入,以下为主要程序代码:
·图形显示模块
功能:以图形界面来显示处理后的数据,以便更直观地观察智能车的运行状态。
实现:将上一模块中装入各数组的数据在用户的选择的模式下进行画图,可以只看一幅图,也可以将四幅图放在一起进行对比观看。实际的运行界面及效果如图2。

结语
该系统通过添加无线收发模块,将智能车的实时状态信息传到上位机上,通过VC++编程,用图象直观形象地将其表现出来,很好地达到了对智能车状态实时监测的目的,极大地方便了我们调节PID等智能车参数,对赛道记忆算法的研究提供了很大的帮助。
关键字:算法 无线 传感 编码
引用地址:
智能车运动状态实时监测系统的设计及实现
推荐阅读最新更新时间:2024-05-13 18:37
基于软件无线电的直扩系统的设计
0 引言 直接序列扩频通信是扩频通信技术中的一种,具有抗干扰、抗多径衰落、抗阻塞能力强,以及频谱利用率高、保密性好、截获率低、易于组网、进行高精使测距等诸多优点。 本文提出了一种基于软件无线电的直扩系统的设计方案。给出了各项设计参数指标,并对所提出的设计方案进行了仿真验证。 1 系统基本结构 基于软件无线电的直扩通信终端采用对中频进行数字化采样,由软件编程实现信号的扩频、调制、解扩、解调等数字信号处理。本文重点介绍直扩通信终端的中频数字处理的具体实现方案。直扩通信终端的结构框图如图1所示。 信号发射时,信息经过信源、信道编码后,与扩频伪码进行相乘扩频。为了使扩频后的基带信号与后面的
[模拟电子]

ST 最新STM32 Primer开发工具可玩Maze和Breakout
完整、独立、预编程的评估工具套件,既有充满趣味性的功能介绍,又有严肃的开发工具,可以链接到在线开发社区 中国,2007年10月15日 — 意法半导体(纽约证券交易所代码:STM)今天推出了一套价格低廉的开发工具,这款代号为STM32 Primer开发工具是一套完整的学习与娱乐相结合的趣味性应用开发工具,用于ST的STM32系列基于具有突破性的ARM Cortex-M3内核的闪存微控制器。这套工具包含一个创新的用户界面、多个游戏和向新用户介绍该系列产品的产品入门功能,以及用于高级开发和编程的Raisonance软件工具。 STM32 Primer是一个手持评估开发工具,力图通过简单和有趣的介绍,让用户了解STM32的强大功能。紧
[新品]
快速和低速工作-使用新的KAF-09001图像传感器
当用一个新的图像传感器进行初始设计时,关键一步是了解该新器件的预期用途– 描述客户希望产品如何工作的“用例”。客户主要想器件以高帧率工作,还是在低光照条件下工作?或者它们将被优化以实现低功耗,或低读出噪声?有时,似乎只 要列出客户对所设计的新产品的兴趣所在即可。但是产品通常不只用于一方面,当新产品的目标用例似乎将设计推向相反的方向时,事情可能变得复杂。 以新的KAI-09001图像传感器为例。该全帧CCD像我们现有的KAF-09000图像传感器,提供捕获数字X光系统中图像所需的高性能。这两款器件都提供900万像素分辨率及大的12微米像素,提供高灵敏度、高动态范围和低噪声–这些特性支持捕获关键细节,同时有助于限制使用的X射线剂量
[传感器]
高通签下授权大单,Halo加速挺进电动车无线充电
高通(Qualcomm)与Ricardo近日签署电动车无线充电(Wireless Electric Vehicle Charging, WEVC)技术授权协议,Ricardo将透过高通的Halo解决方案开发商业化的电动车无线充电系统,并协助汽车制造商发展电动车(EV)与插电式混合动力车(PHEV)。 高通副总裁暨无线充电部门总经理Steve Pazol表示,Ricardo了解汽车产业当前的发展方向,该公司藉由和Ricardo合作,能进一步强化高通Halo汽车供应链的阵容,为传统汽车制造商及电动车新进厂商提供多元的产品选项。
Ricardo公司执行长Dave Shemmans认为,运输载具日趋电动化,不仅可减少社会对化石燃料的依
[嵌入式]
苹果新专利曝光 以后iPhone可以悬浮在空中无线充电?
近日,据报道,美国专利商标局公布了苹果公司获得的一项关于磁悬浮系统专利。据称,这应该是苹果公司最酷的专利之一。 据介绍,磁悬浮系统可以给iPhone、Apple Watch或者其他电子设备无线充电。充电时,设备悬浮在上方或一个磁悬浮系统中。在充电的过程中,悬浮装置产生的磁场可以将电流导入被充电设备的感应线圈,给设备充电。 另外,这种磁悬浮系统也可以用于苹果零售店展示商品,通过磁悬浮系统来展示一款商品,既新颖又方便消费者观察商品。
[手机便携]
基于Pi控制器的交流电机控制系统控制算法综述
1 引言 随着电力电子器件及微电子器件的迅速发展,以及现代控制理论在交流调速传动中的具体应用,从一般要求的小范围调速传动到高精度、快响应、大范围传动;从单机传动到多机传动协调运转,几乎都可采用交流传动。但交流电机本质上是一个非线性的被控对象,电机参数在实际应用中会发生变化,而且可能存在比较严重的外部干扰。经典控制理论不能克服负载、模型参数的大范围变化及非线性因素的影响,因而控制性能将会受到影响。要获得高性能的交流电机控制系统,就必须研究先进的控制算法以弥补经典控制的缺陷和不足。近年来,随着现代控制理论的发展,先进控制算法被广泛应用于交流电机控制系统,例如自适应控制、滑模变结构控制、神经网络控制、模糊控制等,并取得一定成果。因
[嵌入式]
新算法助力机器人更轻松地抓取物体
(文章来源:天极网) 如果机器人要拿起一个物体并将其放进一个容器里。首先,机器人需要观察物体,在6D空间中决定抓取器的移动位置。需要注意的是,抓取成功与否还取决于物体和夹具的几何形状、物体质量分布以及表面摩擦力,这对于机器人来说实现起来是非常困难的。 据外媒报道,来自的研究人员开发了一种名为6-DoF GraspNet的新算法,可以让机器人抓取任意物体。据了解,6-DoF GraspNet工作原理如下。 机械手观察物体并决定在6D空间(空间中的x、y、z坐标平面和旋转三维空间)中的移动路径。该算法的设计方式是生成一组可能的握持器并根据需求进行移动。然后整个握持器通过一个“握持评价器”运行,该评价器会为每个可能的握持分
[机器人]
英飞凌推出可编程高压PSoC™ 4 HVMS系列, 适用于触控式HMI等智能传感应用
英飞凌推出可编程高压PSoC™ 4 HVMS系列, 适用于触控式HMI等智能传感应用,进一步拓展汽车产品线 【2024年5月9日,德国慕尼黑讯】信息安全与功能安全在汽车行业发挥着日益重要的作用,即便在低端微控制器应用中也不例外。与此同时, 汽车制造商正在用触摸表面取代机械按钮,实现简洁的驾驶舱和方向盘。因此,电子电路的空间受到很大限制,需要高度集成、外形小巧的集成电路(IC)。为了应对这些挑战,全球功率系统和物联网领域的半导体领导者英飞凌科技股份公司推出PSoC™ 4 HVMS系列汽车微控制器。 该系列集成了高压功能(12 V稳压器和LIN/CXPI收发器)和先进的模拟功能(CAPSENSE™电感式传感技术),符合 ISO2
[汽车电子]
 中国新能源汽车行业之传感器分析
中国新能源汽车行业之传感器分析 ICCV2023论文汇总:Fairness, Privacy, Ethics, Social-good, Transparency, Accountability in Vision(视觉中的公平、隐
ICCV2023论文汇总:Fairness, Privacy, Ethics, Social-good, Transparency, Accountability in Vision(视觉中的公平、隐 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号