1 引言
芯片内互连线分布参数所引起的寄生效应已成为高速集成电路中影响信号完整性和整个系统性能的重要因素。为了更好的估计互连线延迟(delay)和线间串扰(cross talk),必须使用电磁场的方法来提取互连线频变分布参数,并在此基础上进行电路仿真,得到较为精确的互连线电路模型。
图1是典型的芯片内部的六层布线结构图〔1〕。由图可见,每个布线层都配置了信号线和接地线。为了计算信号线的分布电阻和分布电感,不仅要考虑信号线之间的耦合效应,还必须考虑多个有限尺寸接地导线的影响。当信号线接近衬底时,还要进一步考虑硅衬底对其的影响。


位于半导体硅衬底之上的信号线,属于金属绝缘半导体(MetalInsulatorSemiconductor, MIS)传输线,是集成电路芯片中最基本的一类互连线。由于半导体衬底具有非零电导率,该类互连线具有三种基本传输模式,如图2所示,分别为慢波模(slowwave mode)、趋肤效应模(skin effect mode)和介质准TEM模(dielectric quasiTEM mode)。由于这三种模式的存在,该类互连线存在着复杂的频变效应,特别是从一种模式转换到另外一种模式时,频变效应尤其明显〔2〕。
本文采用导体截面矩量法计算此类多导体传输线系统的分布电阻和分布电感。该方法由Weeks等人在1979年提出〔3〕。在文献〔4〕中,该方法被应用于印制电路板(PCB)上互连线的电阻和电感分布参数提取。本文中,作者根据芯片内互连线分布的具体情况对算法作了改进。在改进前,算法只考虑多导体传输线系统仅有一个公共接地导体。而实际上,在芯片内部,往往同时存在多个接地导体(Current Return Path),例如在每个布线层上都分布着电源线和地线。基于导体截面矩量法的似稳场假设,硅衬底也可作为接地导体处理。为此,作者推导了消去多接地导体的公式,使得算法能够适用于芯片内互连线参数的提取。
2 互连线分布阻抗矩阵算法
假设有N根信号导线和m根接地导体(包括硅衬底)组成多导体线传输系统。对似稳电磁场方程取电标位φ和磁矢位 表示为
表示为
因为 都是沿z轴方向的,可以将矢量符号略去。
都是沿z轴方向的,可以将矢量符号略去。
应用矩量法,将第n块导体截面分成Mn个矩形分区(n=1,2,…,N+m-1,N+m),并由每块导体每个分区的平均磁矢位推出每块导体上的磁矢位,代入(4)式得
其中,s(k,j)代表第k块导体第j个分区的面积,Is(k,j) 代表第k块导体第j个分区上的电流,R代表两点之间的距离。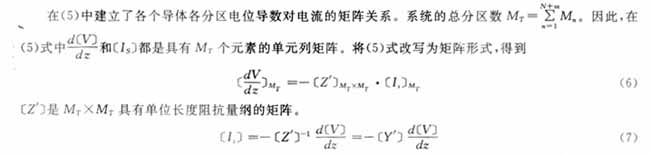
其中, 和Ii分别代表了第i块导体的电位导数和电流,而
和Ii分别代表了第i块导体的电位导数和电流,而
其中
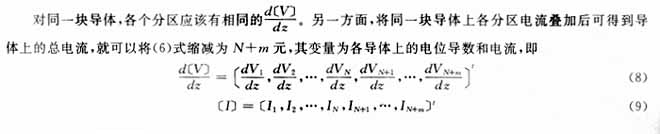
〔Z〕是一个N+m维的方阵,包含了N根导体和m根接地导体的分布阻抗信息,而要求解的是N根导体的分布电阻和分布电感参数,因此需要将m根接地导体消去。
为了将m根接地导体消去,将(13)式重写为下面的形式
取第i个导体对接地导体的相对电位代替原来的电位,即
因此,(14)式 就变为
其中![]()
显然,(18)中得到的〔z′〕的最后一行全为0。此时,尚有一个已知条件没有使用。事实上,由于基尔霍夫电流定律的存在,(14)式中的N+m个电流变量并非是全部独立的,它们满足
注意到,(21)式和(18)式的不同仅在于最后一行。
其中,
根据(3)式,有 。由此,就同时得到了N根互连线的分布电阻和分布电感。
。由此,就同时得到了N根互连线的分布电阻和分布电感。
使用该算法需要注意的问题是网格的划分。文献〔3〕中建议网格的大小应该满足≤δ×δ 趋肤深度)。但如果所有网格都按此标准划分,在频率较高时会占用内存过多,影响计算效率。考虑到频率较高时,电流集中在导体表面,可采用不均匀网格技术,在导体表面按趋肤深度标准划分,在导体内部可以分得较粗,从而减少网格总数,提高计算效率。
趋肤深度)。但如果所有网格都按此标准划分,在频率较高时会占用内存过多,影响计算效率。考虑到频率较高时,电流集中在导体表面,可采用不均匀网格技术,在导体表面按趋肤深度标准划分,在导体内部可以分得较粗,从而减少网格总数,提高计算效率。
3 数值计算结果
如图3所示结构,信号线和接地线为铝(σ=3.54×10.7S/m),半导体衬底为硅(σ=1000S/m)。各部分尺寸为:w=2μm,s=2μm,t=0.706μm, h1=0.5μm,h2=500μm。

图4是应用前述方法针对图3中结构所得到的计算结果。可见,互连线的分布电阻和分布电感均与频率相关。当频率较低时,电流在导体截面上均匀分布,相当于直流电阻。随着频率升高,相应的趋肤深度逐渐减小到可以和导体截面尺寸相比拟时,导体截面的电流分布开始不均匀,故分布电阻开始随频率的增加而增加。对于分布电感,当频率很低时,电流分布均匀,分布电感中包含内电感和外电感。随着频率逐渐增加,内电感部分逐渐减小,整个分布电感随着频率的增加而下降,以至于只存在外电感。最终分布电感成为恒定的外电感。
图4中还把本文中的结果和文献〔5〕中谱域法的计算结果作了比较。谱域法是一种全波分析方法,广泛应用于微波集成电路中多层介质传输线电磁参量的求解。但是,由于本文的分析对象是芯片内互连线,相对于微波集成电路中的传输线,其尺寸较小,虽然导体截面矩量法是一种准静态方法,但从计算精度上看,两者差异不大。如图所示,除互阻参数外,其他都符合得较好。此外,谱域法求解变换复杂,求解变量多,本文方法相对直观。另一个问题是谱域法求解时,通常认为导体无限薄,这样的假设在芯片内无法成立,而如果考虑导体厚度则计算将会相当的繁琐,而本文提出的方法就不存在这样的问题。
如图5所示结构。信号线和接地线为铝(σ=2.7×10.7S/m),半导体衬底为硅。各部分尺寸为:w=4.8μm,t=0.52μm,h1=0.57μm,h2=500μm。


在同样的结构下,对硅衬底我们选取不同的电导率σ:
1)σ=800S/m;2)σ=10S/m;3)σ=0,即不考虑硅衬底的损耗效应。
图6中的计算结果可以非常清楚的表明硅衬底导电率变化对互连线分布参数的影响。当衬底导电率很小时,分布电阻和分布电感的频变效应不显著;当导电率较大时,随着频率增大,衬底的趋肤深度逐渐小于衬底厚度,传输线的传输模式也从慢波模式改变为趋肤效应模式,分布参数的变化也显现强烈的频变效应。

4 结论
本文通过导体截面矩量法提取芯片内互连线的分布电阻和分布电感参数。在应用过程中,根据芯片内的实际情况,推导了多接地导体(包括硅衬底)情况下的电阻和电感计算公式,对原有算法进行了改进。通过两个例子,分析了硅衬底导电率变化对金属绝缘半导体传输线的分布电阻和分布电感参数的影响,说明该方法可应用于芯片内互连线分布电阻和分布电感参数提取。
参考文献
〔1〕A. Deutsch, etc. Frequencydependent crosstalk simulation for onchip interconnections. IEEE Trans. on Advanced Packaging,1999,22(3): 292~308.
〔2〕H. Hasegawa, M. Furukawa, H. Yanai. Properties of microstrip line on SiSiO2 system. IEEE Trans. MTT, 1971,19(11): 869~881.
〔3〕W. T. Weeks, L. L. Wu, M. F. McAllister, A. Singh. Resistive and inductive skin effect in rectangular conductors. IBM J. Res. Develop. , 1979,23(6): 652~660.
〔4〕朱辉. 高速电路互连线的电磁建模:〔硕士学位论文〕. 上海交通大学,1991.
〔5〕Enno Grotelushen, Lohit S. Dutta, Stefan Zaage. Quasianalytical analysis of the broadband properties of multiconductor transmission lines on semiconducting substrates. IEEE Trans. on Components, Packaging and Manufacturing Technology——Part B, 1994,17(3): 376~382.
上一篇:德州仪器联手安富利美国电子元件部利用实时模拟电子实验室网络广播共同探讨开关稳压器 PCB 布局技术
下一篇:FIR数字滤波器分布式算法的原理及FPGA实现
推荐阅读最新更新时间:2024-05-13 18:16

 【干货】浅谈电动汽车充电系统
【干货】浅谈电动汽车充电系统 中国汽车技术论坛-制动系统标准
中国汽车技术论坛-制动系统标准 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练






- 2024年Automechanika Shanghai海量同期活动刷新历届记录,汇聚行业智慧,共谋未来发展
- 企业文化分享 如何培养稀缺的硅IP专业人员?SmartDV开启的个人成长与团队协作之旅
- 恩智浦发布首个超宽带无线电池管理系统解决方案
- 北交大本科生探秘泰克先进半导体开放实验室,亲历前沿高科技魅力
- 新帅上任:杜德森博士(Dr. Torsten Derr)将于2025年1月1日出任肖特集团首席执行官
- 边缘 AI 如何提升日常体验
- 苹果要首发!台积电宣布2nm已准备就绪
- AMD有望用上全新芯片堆叠技术:延迟大幅减少、性能显著提升
- 宁德时代发布10月战报
- 2024年10月电池行业:增长势头不减!




 京公网安备 11010802033920号
京公网安备 11010802033920号