1 引言
利用硬件描述语言结合可编程逻辑器件(PLD)可以极大地方便数字集成电路的设计,本文介绍一种利用VHDL.硬件描述语言结合现场可编程门阵列(FPGA)设计的数控延时器,延时器在时钟clk的作用下,从8位数据线输入延时量,到IATCH高电平时锁存数据,可以实现对触发脉冲TRIG的任意量的延时。由于延时范围不同,设计所用到的FPGA的资源也不同,本文详细介绍最大延时量小于触发脉冲周期的情况。该延时器的软件编程和调试均在Muxplus II环境下完成,系统设计选用Altera公司的EPFl0K30AQC208-3,EPC1441型专用电路,与DSP相结合,应用于雷达目标模拟器的控制部分,实现对目标距离的模拟。
2 设计原理
笔者设计的数控延时器采用3个串联计数器来实现。由于在触发脉冲TRIG的上升沿开始延时,使用时钟的上升沿计数,考虑到VHDL对时钟描述的限制,设计采用计数器1产生同步脉冲SYNC,宽度为Tclk,利用SYNC的高电平触发cflag,并在延时结束后cflag清零;计数器2计算延时的长度;计数器3计算所要产生的输出脉冲OUTPUT的脉宽,并在计数结束时对计数器2和计数器3清零。延时器的外部接口电路如图1所示,原理框图如图2所示。整个电路的设计采用同步时钟计数以尽量减少因局部时钟不稳定所产生的毛刺和竞争冒险。
该数控延时器低电平时锁存数据,高电平时改变内部寄存器的数值(与AD9501型数控延时器的数据锁存端电平相反)。一般情况下,触发脉冲与时钟的上升沿是一致的,如果输入的触发脉冲与时钟不一致.则整个电路的延时将产生一定的误差。时序仿真如图3所示,延时量由dlyLH为高电平时数据总线data8上的数据决定。
该数控延时器的VHDL硬件描述语言程序如下:



在该程序中,cnt1为延时量,cnt2为输出脉冲的宽度,cflag为开始计数的标志。该段程序在触发脉冲的周期大于256*Tclk时,最大延时量为256*Tclk,如果触发脉冲周期小于256*Tclk,则最大延时量为Tclk一Toutput (Toutput为输出脉冲的宽度)。
事实上。在实际应用中,延时后的输出脉冲与输入的触发脉冲的频率并不相同,譬如在设计雷达目标模拟器时要求延时后产生一连串的7分频时钟,时序如图4所示(延时后产生11个7分频的脉冲,占空比为2:5)。
要产生上述触发脉冲,只需改变计数器2的长度,并在程序中加入case判断语句即可。

3 延时范围讨论
3.1 延时范围小于触发脉冲周期
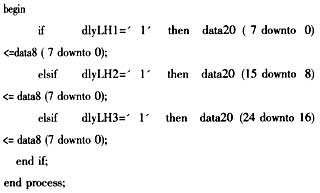
这种情况只需增加数据输入端的位数,不过一般情况下,数据输入端位数是固定的,这时可以在FPGA的内部定义多位的数据寄存器。以延时范围为224*Tclk为例,在FPGA内部定义24位的数据寄存器,并定义3条地址线dlyLH1、dlyLH2和dlyLH3,通过8位数据总线分3次向数据寄存器送数,送数时间应在前一脉冲延时结束之后与下一脉冲到来之前。数据送入寄存器的程序如下:
3.2 延时范围大于触发脉冲周期
这种情况在实际应用中比较广泛.譬如在雷达模拟器的设计中,所模拟的目标的距离范围一般都很大.因而输出延时脉冲的延时量将大于1个触发脉冲周期,这时在考虑到FPGA资源的前提下.可以采用多路延时合并的处理方法。以延时范围小于4个周期为例,具体时序如图5所示。
利用SYNC信号4分频并产生4路分频后的信号。在FPGA内部设计4个延时电路,SYNC1、SYNC2、SYNC3、SYNC4分别作为4个延时电路的触发信号,每个延时电路仿照第一种延时范围的设计方法,输出触发脉冲通过4个或门送到输出端OUTPUT,值得注意的是每个延时电路内部都要定义1个与DATAREG位数相同的数据寄存器。延时数据在延时开始时送入内部寄存器。使用多路延时合并方法最关键的是要产生准确的分频脉冲.如果产生的脉冲有毛刺.或者电路在设计的时候存在冒险,整个延时系统有可能都不能正常工作。
4 延时误差分析
以延时范围小于触发脉冲周期为例,分析固定延时及延时误差。
该延时器在Muxplus II环境下从输入时钟Tclk到dlytrig的延时为8.2 ns;产生SYNC的宽度为Tclk。因此在触发脉冲上升沿与时钟信号上升沿对时.该延时电路的固有延时为8.2 ns+2Tclk。但一般情况下.触发脉冲的上升沿与时钟的上升沿并不是一致的,根据二者之间的关系可知,最大延时误差T满足:0
由于该数控延时器使用时钟来计数,因此延时量只能为Tclk的整数倍。如果设计者希望有更精确的延时.可以在设计的基础上外加一片AD9501,该器件的延时可以精确到(Ttotal+Td)×1/28,其中Ttotal是AD9501的总延时,Td是AD9501的固有延时。
5 结束语
本文详细介绍了利用VHDL硬件描述语言结合FPGA设计一种数控延时器的方法,讨论了延时范围,分析了延时误差,该延时器的设计旨在和DSP相结合实现对延时信号的处理。随着EDA技术的飞速发展。使用硬件描述语言设计FPGA是电子设计人员应该掌握的一门技术。同时,将DSP和FPGA技术相结合是进行数字信号处理的一种趋势。
引用地址:
基于现场可编程门阵列的数控延时器的设计
推荐阅读最新更新时间:2024-05-13 18:15
赛恩领动再获亿元融资,抢跑4D成像雷达量产布局
赛恩领动宣布于近日完成A+轮亿元融资,由金浦投资、华强资本联合领投,A轮老股东蔚来资本与小米产投追加投资,充分表现出了对赛恩领动研发创新技术与4D成像雷达市场前景的认可。资金将用于增加研发投入及持续推进产品工业化进程。 【当“锦上添花”摇身一变“绝对刚需”】 伴随着L2+辅助驾驶系统落地,最核心的增量需求来自于智能驾驶传感器。智能驾驶传感器通过不断收集车辆周边环境动静态信息,将数据传输给决策控制系统,并通过与执行系统的配合实现辅助驾驶系统安全运作。市面上最新款支持高速、城区NOA的车型普遍配备超过20个不同类型传感器。巨大市场需求推动下,辅助驾驶功能从过去“锦上添花”摇身一变“绝对刚需”,中国汽车市场正加速向智能化深
[汽车电子]

英飞凌发布新的微控制器 可用于77GHz汽车雷达应用
据外媒报道,英飞凌科技(Infineon Technologies )将推出汽车微控制器AURIX™系列新产品TC3A,可用于新的77 GHz汽车雷达应用,如ADAS和自动驾驶的高端转角雷达系统。该产品包括新的信号处理单元、用于雷达的大型SRAM内存和四个运行速度为300 MHz的TriCore™处理器。 (图片来源:英飞凌官网) TC3A的信号处理单元SPU 2.0是英飞凌雷达处理加速器的升级版本,其快速傅里叶变换(FFT)处理延迟减少,减少干涉的能力增强。此外,其不同调制方案允许一线客户以较低的成本提高雷达分辨率。 英飞凌汽车硅谷创新中心负责人Ritesh Tyagi表示,“目前的汽车越来越多地采用ADAS,最
[汽车电子]
一种基于PSoC芯片的倒车雷达控制系统设计
PSoC传感器应用平台 在嵌入式系统中,控制芯片主要处理两大类型的信号,一种是数字信号,另一种就是模拟信号。模拟信号通常来自于传感器。要从这些模拟传感器中获得准确的信号并不是一件容易的事情。模拟的输出信号通常振幅比较小,所以需要一个信号放大器。信号放大后,噪声会也被放大,又需要一个模拟的低通或带通滤波进行滤波。如果多种传感器同时使用,还需要一个模拟的MUX。除此之外,还可能用到比较器和D/A转换器。 传统设计中,控制器只用来实现处理数据、系统间的通讯和控制功能。如果您的设计也用这种传统的方式,就会面临一些挑战。这些挑战主要来自于分离的模拟器件和固定功能的MCU。首先从系统设计角度看,随着市场变化速度的加快和用户要求的提
[汽车电子]
法雷奥正式发布了旗下第三代激光雷达
法雷奥正式发布了旗下第三代激光雷达(LiDAR)。这项技术能够显著提升驾驶辅助系统的性能使得自动驾驶成为现实,同时极大地提高了道路安全水平,将于 2024 年投放市场。 第三代扫描激光雷达(LiDAR) 法雷奥第三代激光雷达在探测距离、分辨率、帧率等方面的性能都有较大提升。它能以每秒 450 万像素和 25 帧的速度重建车辆周围环境,并实时生成 3D 图像;和上一代产品相比,它的分辨率提高了 12 倍,探测距离增加了 3 倍,视角扩大了 2.5 倍。 值得一提的是,这款新的激光雷达具备独特的感知性能,能够看到人类、相机、雷达所看不到的东西。这意味着在许多情况下(L2 级自动驾驶及以上)都可以进行自动驾驶,包括在高速公路
[汽车电子]
应用VX实现加特兰雷达原始数据采集
01/ 挑战 在快速发展的汽车自动驾驶和驾驶辅助(ADAS)领域,毫米波雷达因其全天候和出色的测速测距表现被广泛应用。加特兰微电子(Calterah Semiconductor)作为国内CMOS工艺毫米波雷达芯片开发与设计的领导者,其量产的汽车级全集成毫米波雷达SoC芯片,为客户提供高性能和小型化的选择。 在雷达应用的开发前期,采集雷达的原始数据用于算法迭代变得越来越重要。一方面,历史项目的数据需要有效地复用到新项目中,加速系统的开发验证;另一方面,出于安全要求的验证需求,高覆盖率测试也必不可少。 Vector开发的新型接口硬件可以适配加特兰雷达芯片,可采集来自雷达单片微波集成电路(Monolithic microwave
[嵌入式]
无人车创企千千万,其实都属于这两大阵营
据报道,在未来的某个时刻,坐在车里的孩子可能会问父母:很久以前的汽车是什么样的?他们讨论的就是当前场景,大多数人依然在用方向盘和踏板来控制汽车。 当然,距离实现“全自动无人驾驶汽车”的目标还有很长的路要走,但已经有许多公司在努力建设这样的未来。 然而,改变交通面貌是非常昂贵的业务,通常需要企业或大量风险投资支持来帮助实现这一雄心勃勃的目标。那么,现在到底有多少独立的、资金充足的无人驾驶汽车公司?简而言之,并没有你想像的那么多。 通过浏览企业数据库公司Crunchbase的“自动汽车”类别中的独立公司,这些公司都已经筹集了5000万美元或更多风险资金。 经过筛选,我们发现这些公司大多可归为两大阵营:1)致力于
[嵌入式]
特斯拉自主研发雷达传感器要提速,不惜挖角德尔福
德尔福同时是博世和特斯拉的雷达设备供应商,这两家也是德尔福在自动驾驶领域的直接竞争对手,关系乱乱的。 特斯拉从德尔福挖人,加速推进雷达传感器的自主研发 2008年,特斯拉第一辆Roadster下线,距今已有8年时光,此后又推出了大受用户追捧的Model S和Model X两款车型。这些年,特斯拉在辅助驾驶及无人驾驶领域的努力有目共睹,而且率先将该技术应用到在售车型中。 不可避免,期间也暴露了很多技术不成熟的问题,还引发了多起交通事故。特别是今年7月的那次自动驾驶致死事故,引发了业界震动。 但特斯拉并不打算退却,反而加速积累相关技术,特别是对自动驾驶比较关键的雷达领域。今年早些时候,特斯拉与其雷达(radar antenna)供
[汽车电子]
马斯克:特斯拉不再需要用激光雷达采集FSD训练数据
Luminar Technologies 近日在其致股东的信函中提到,电动汽车制造商特斯拉是其 2024 年第一季度最大的 LiDAR(激光雷达)产品客户,当季特斯拉贡献了 Luminar 超过 10% 的收入。但根据埃隆・马斯克最近的表态,Luminar 未来来自特斯拉的业务可能会减少。 这一消息让外界猜测特斯拉可能在自动驾驶领域转向使用激光雷达,似乎与马斯克此前将激光雷达方案称为“歧路”的言论相左。此前马斯克曾将激光雷达称为“愚蠢的差事”和“死胡同”。不过,长期关注特斯拉的人士指出,特斯拉一直使用激光雷达设备来验证测试车辆的视觉数据。因此,特斯拉从 Luminar 购买 LiDAR 设备也就不奇怪了。 针对特斯拉成为最大客户的
[汽车电子]





 中国车载激光雷达市场洞察报告
中国车载激光雷达市场洞察报告 模拟集成电路设计与仿真
模拟集成电路设计与仿真









 京公网安备 11010802033920号
京公网安备 11010802033920号