引言
与机械电位器相比,数字电位器有许多优点。但是在有些应用场合,数字电位器的分辨率往往达不到设计要求,通常最大抽头数为1 024。以X9241为例,内部包括一个I2C接口和4个64抽头的数字电位器,可独立使用,也可串联使用,如按常规方法使用,其分辨率较低,即使4个电位器串联,也只能达到256个抽头。本文提出了一种软件、硬件结合的方法,可使电位器的中间抽头数达到8 001个,分辨率达到O.008%。
1 设计原理
1.1 基本原理
高分辨率数字电位器POT由4个电位器组成,如图1所示,4个数字电位器POT0、POT1、POT2、POT3均为64抽头数字电位器。 POTO、 POT3的固定端并联,滑动端分别接POT12的固定端。POT12由POT1、POT2串联,组成一个127抽头的电位器。4个独立电位器阻值相等,可根据需要选取。高分辨率数字电位器的固定端为VH、VL,滑动端为VW,VW由POT1、POT2的2个滑动端并连。
假设POT0、POT1、POT2、POT3、POT12的滑动端位置分别为x0、x1、x2、x3、y,POT的滑动端位置为z。
现采取以下控制策略:
①若POT3的滑动端位置为x,则POTO的滑动端位置同步调节到x+1,即两电位器始终保持1的间隔,相当于粗调节;
②调节POTl2滑动端位置y,相当于把间隔为1的区间再细分若干等分,即细调节。
采用等校电路法,可得到z与x、y的关系。
设VL、VH端电位分别为0、U,滑动端电位为UW,根据电学公式可得:
其中,U0W、U1W分别为POT1、POT1滑动端输出电位,并加到POT12的两个固定端。
由式(1)、式(2)推出式(3),得VW端输出电位。
即电位器POT的滑动端相对于VL的电阻阻值为:
若规定z的步进增量为1,则有:
其中,R为电位器固定端的阻值,x的取值范围为0~62,y的取值范围为0~127。z的取值范围为0~8 001。分辨率为O.008%,中间抽头数为8 001个。
因为x、y、z均为整数,所以有:
即x为z/127的取整,y为z/127的取余。
1.2 控制算法
式(5)、(6)即为实现高分辨率数字电位器的基本公式。为了软件设计,还必须建立POT的中间抽头位置z与POT0、POT1、POT2、POT3的中间抽头位置的关系。
根据图1可知:
2 硬件电路
2.1 X9241数字电位器
X9241是Xicor公司生产的数字电位器,内部包括1个I2C接口和4个64位数字电位器POTO、POT1、POT2、POT3。每个数字电位器由电阻阵列及与之对应的滑动端计数寄存器WCR、4个位数据寄存器R0~R3等部分构成。其引脚配置如图3所示。
X9241提供了把阵列串联起来的方法,可以把1个阵列的63个电阻元件与1个相邻阵列的电阻元件串联起来。其控制位在3字节的指令中,其数据字节包括用来定义滑动端位置的6位(LSB)加上高2位:CM(串联方式)和DW(禁止滑动端)。数据字节如下所示:
2.2 电路设计
根据图1的设计原理和图3的引脚配置图,可实现高分辨率数字电位器的电路设计,如图4所示。
①SDA、SCL是I2C总线的串行数据和串行时钟,与单片机的I/O线相连,单片机是主器件,X9241是从器件,器件地址为:
0 1 0 1 A3 A2 A1 A0
高4位固定,低4位由A3~A0的接线方式所决定,按照图4电路的接线方式,X9241的从地址为50H。
②为了提高线性度,可在VW0与VL1之间加入1级运算放大器组成的跟随器,VW3与VH2之间也加入1级。其改进电路如图5所示。
3.1 读写单个数字电位器函数设计
根据X9241的指令结构和控制时序,可以编写读写单个数字电位器的程序。
(1)改变电位器中间抽头命令(写WCR)时序以写电位器POT0为例,把电位器0的中间抽头WCR设置为20H(X9241每个电位器的最大抽头数是 64,即有效值小于63)。命令控制字为101000000B,即AOH;若在电路中AOA1A2A3均接低电平,则器件地址为01010000B,即 50H。其命令序列如下:
Start→发送地址50H→Ack→发送命令字A0H→ACK→发送20H→ACK→Stop。
(2)读电位器中间抽头位置命令(读WCR)时序以读电位器POT1为例,把电位器1的中间抽头WCR位置值读回。命令控制字为100100000B,即90H;若在电路中AOA1A2A3均接低电平,则器件地址为01010000B,即50H。其命令序列如下:
Start→发送地址50H→Ack→发送命令字90H→ACK→接收1个字节→ACK→Stop。
3.2 主函数设计
本函数的功能是把设计的数字电位器POT的中间抽头位置z转换为4个独立数字电位器POT0~POT3的中间抽头位置寄存器WCR的值x0~x3,同时控制POT1、POT2的控制位CM和DW,如图6所示。
在流程图中,当y<64时,POT12(由POT1和POT2串联)的中间抽头位置在POT2范围内,所以POT1的中间抽头失效,即置DM1=1;当y≥64时,POT12的中间抽头位置在POT1范围内,所以POT2的中间抽头失效,即置DM2=1。
结语
采用软硬件协同的方法,能以较低的成本实现高分辩率数字电位器的设计。同一芯片中4个数字电位器的良好匹配和电压跟随器的应用,使设计的数字电位器具有更好的线性度。在实际应用中,为了提高带负载能力,需要在滑动输出端接一输出缓冲器。
关键字:高分辨率 数字电位器
编辑:探路者 引用地址:高分辨率数字电位器的软件实现
与机械电位器相比,数字电位器有许多优点。但是在有些应用场合,数字电位器的分辨率往往达不到设计要求,通常最大抽头数为1 024。以X9241为例,内部包括一个I2C接口和4个64抽头的数字电位器,可独立使用,也可串联使用,如按常规方法使用,其分辨率较低,即使4个电位器串联,也只能达到256个抽头。本文提出了一种软件、硬件结合的方法,可使电位器的中间抽头数达到8 001个,分辨率达到O.008%。
1 设计原理
1.1 基本原理
高分辨率数字电位器POT由4个电位器组成,如图1所示,4个数字电位器POT0、POT1、POT2、POT3均为64抽头数字电位器。 POTO、 POT3的固定端并联,滑动端分别接POT12的固定端。POT12由POT1、POT2串联,组成一个127抽头的电位器。4个独立电位器阻值相等,可根据需要选取。高分辨率数字电位器的固定端为VH、VL,滑动端为VW,VW由POT1、POT2的2个滑动端并连。
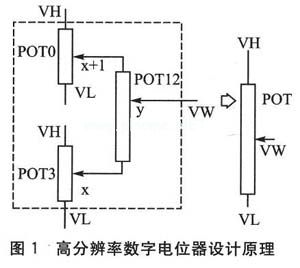 |
假设POT0、POT1、POT2、POT3、POT12的滑动端位置分别为x0、x1、x2、x3、y,POT的滑动端位置为z。
现采取以下控制策略:
①若POT3的滑动端位置为x,则POTO的滑动端位置同步调节到x+1,即两电位器始终保持1的间隔,相当于粗调节;
②调节POTl2滑动端位置y,相当于把间隔为1的区间再细分若干等分,即细调节。
采用等校电路法,可得到z与x、y的关系。
设VL、VH端电位分别为0、U,滑动端电位为UW,根据电学公式可得:
 |
其中,U0W、U1W分别为POT1、POT1滑动端输出电位,并加到POT12的两个固定端。
由式(1)、式(2)推出式(3),得VW端输出电位。
即电位器POT的滑动端相对于VL的电阻阻值为:
其中,R为电位器固定端的阻值,x的取值范围为0~62,y的取值范围为0~127。z的取值范围为0~8 001。分辨率为O.008%,中间抽头数为8 001个。
因为x、y、z均为整数,所以有:
即x为z/127的取整,y为z/127的取余。
1.2 控制算法
式(5)、(6)即为实现高分辨率数字电位器的基本公式。为了软件设计,还必须建立POT的中间抽头位置z与POT0、POT1、POT2、POT3的中间抽头位置的关系。
根据图1可知:
2 硬件电路
2.1 X9241数字电位器
X9241是Xicor公司生产的数字电位器,内部包括1个I2C接口和4个64位数字电位器POTO、POT1、POT2、POT3。每个数字电位器由电阻阵列及与之对应的滑动端计数寄存器WCR、4个位数据寄存器R0~R3等部分构成。其引脚配置如图3所示。
每个电位器由63个电阻段组成,每个电阻阵列的物理终端等效于机械电位器的固定端(VH、VL)。每个阵列的VH和VL以及每个电阻段之间的接点(即抽头)通过FET开关连接滑动输出端,而滑动端在电阻阵列中的位置由从WCR控制。其中,VW、VW1、VW2、VW3分别为4个电位器的滑动端,VL0、 VL1、VL2、VL3分别为4个电位器的低端、VH0、VH1、VH2、VH3分别为4个电位器的高端。如果将4个电阻阵列中的2个、3个或4个串联,可构成127、190或253抽头的数字电位器。芯片采用I2C总线接口,SDA、SCL分别为串行数据和串行时钟。A0~A3为芯片地址设置位。
X9241提供了把阵列串联起来的方法,可以把1个阵列的63个电阻元件与1个相邻阵列的电阻元件串联起来。其控制位在3字节的指令中,其数据字节包括用来定义滑动端位置的6位(LSB)加上高2位:CM(串联方式)和DW(禁止滑动端)。数据字节如下所示:
根据图1的设计原理和图3的引脚配置图,可实现高分辨率数字电位器的电路设计,如图4所示。
①SDA、SCL是I2C总线的串行数据和串行时钟,与单片机的I/O线相连,单片机是主器件,X9241是从器件,器件地址为:
0 1 0 1 A3 A2 A1 A0
高4位固定,低4位由A3~A0的接线方式所决定,按照图4电路的接线方式,X9241的从地址为50H。
②为了提高线性度,可在VW0与VL1之间加入1级运算放大器组成的跟随器,VW3与VH2之间也加入1级。其改进电路如图5所示。
3 程序设计
3.1 读写单个数字电位器函数设计
根据X9241的指令结构和控制时序,可以编写读写单个数字电位器的程序。
(1)改变电位器中间抽头命令(写WCR)时序以写电位器POT0为例,把电位器0的中间抽头WCR设置为20H(X9241每个电位器的最大抽头数是 64,即有效值小于63)。命令控制字为101000000B,即AOH;若在电路中AOA1A2A3均接低电平,则器件地址为01010000B,即 50H。其命令序列如下:
Start→发送地址50H→Ack→发送命令字A0H→ACK→发送20H→ACK→Stop。
(2)读电位器中间抽头位置命令(读WCR)时序以读电位器POT1为例,把电位器1的中间抽头WCR位置值读回。命令控制字为100100000B,即90H;若在电路中AOA1A2A3均接低电平,则器件地址为01010000B,即50H。其命令序列如下:
Start→发送地址50H→Ack→发送命令字90H→ACK→接收1个字节→ACK→Stop。
3.2 主函数设计
本函数的功能是把设计的数字电位器POT的中间抽头位置z转换为4个独立数字电位器POT0~POT3的中间抽头位置寄存器WCR的值x0~x3,同时控制POT1、POT2的控制位CM和DW,如图6所示。
在流程图中,当y<64时,POT12(由POT1和POT2串联)的中间抽头位置在POT2范围内,所以POT1的中间抽头失效,即置DM1=1;当y≥64时,POT12的中间抽头位置在POT1范围内,所以POT2的中间抽头失效,即置DM2=1。
结语
采用软硬件协同的方法,能以较低的成本实现高分辩率数字电位器的设计。同一芯片中4个数字电位器的良好匹配和电压跟随器的应用,使设计的数字电位器具有更好的线性度。在实际应用中,为了提高带负载能力,需要在滑动输出端接一输出缓冲器。
上一篇:生产环境对电源模块可靠性的影响
下一篇:基于PIC16F877A的混沌信号发生器的设计
推荐阅读最新更新时间:2023-10-17 15:46
DVCS分布式控制系统超高分辨率图像显示技术及应用
1 引言 GIS、GPS、SCADA、SIG等超高分辨率图像在计算机/工作站显示器中无法以原始分辨率完整显示,只能通过拖动局部查看超高分辨率图像。DLP大屏幕拼接显示系统由多个显示单元堆叠而成,全屏分辨率为单屏分辨率的叠加,例如单屏分辨率为1400×1050,则全屏分辨率为(1400×行)×(1050×列)。因此大屏幕拼接显示墙为超高分辨率图像的完整显示提供了条件。这类超高分辨率图像不仅分辨率高,而且是实时动态变化的,数据量巨大,因此大屏图像控制器对超高分辨率信号的处理能力成为显示问题的关键。 目前业界传统的大屏图像拼接控制器由于其处理能力有限,难以实时处理超高分辨率动态图像,无法满足用户超高分辨率动态图像显示的
[嵌入式]
赛灵思显示目标设计平台加速超高分辨率 4K2K 显示器开发

2012 年 4 月 20 日,中国北京 — 全球可编程平台领导厂商赛灵思公司(Xilinx, (NASDAQ: XLNX) )在美国广播电视设备展 (NAB)宣布推出基于赛灵思联盟计划高级成员东京电子器件有限公司 (TED) 旗下 ACDC(采集、提供、分配、消费)1.0 硬件平台的显示目标设计平台 (TDP)。显示TDP 通过将现有 1080i 或 1080p 视频源近乎无缝地集成到 4K 显示器,可显著加速 4K2K 显示器和高分辨率投影系统的开发。显示TDP 是赛灵思不断发展的 TDP 系列的新增成员,能帮助广播设备设计人员和制造商快速实现面向视频制作价值链上 ACDC 领域的解决方案。
显示器TDP 建立在采用业界
[嵌入式]

Socionext推出新款智能控制器 可实现高分辨率宽屏汽车显示器
据外媒报道,片上系统设计研发公司Socionext推出新型显示器控制器SC1702,可满足不断增长的高分辨率宽屏汽车显示器的需求。 显示器控制器 SC1702 (图片来源: Socionext ) 该款产品是Socionext现有 SC1701系列中的新产品,能够为仪表盘集群提供低成本的最佳安全功能。该系列“智能”显示器控制器可实现具有可扩展性的车载远程显示系统,而且让此类系统具有很高的安全性。 汽车显示器在仪器和仪表、气候控制和其他集成图形的仪表盘指示器等车辆控制系统中的使用率不断上升,而且许多车辆上也增加了抬头显示器(HUD)和电子镜显示器等设备,导致对显示器的要求更多、显示器的选择也更多。此类显示器包括传统的小
[汽车电子]
成像技术进入超高分辨率荧光显微时代
准确观察到细胞内部的活动,一直都是科学家们孜孜以求,费心探索的一个目标。最开始科学家们尝试的是体外成像,但是体外成像无法满足天然环境下描绘生物过程的需要,因此他们开始逐渐从体外观测转向对体内生物体过程的研究。
体内成像,也就是活体成像技术发展至今,已经可以称为活体荧光成像了,采用荧光成像具有操作简单,结果直观,灵敏度高等优点,但虽然如此,活体荧光成像依然存在许多问题,首先就是信号水平不高,假阴性较多的问题,2008年,也就是细胞成像技术被《Nature Methods》评为年度技术的那一年,荧光显微技术焕发出了全新的光彩,超高分辨率荧光显微技术诞生了。
传统光学显微镜受限于光的波长,对于200nm以下的小东西只
[医疗电子]
Arbe Robotics高分辨率成像雷达采用格芯技术
原标题:Arbe Robotics高分辨率成像雷达采用格芯技术,以实现自动驾驶汽车的安全性 加利福尼亚州圣克拉拉,2018年4月26日,——格芯今日宣布,Arbe Robotics已选择在其开创性的专利成像雷达中采用格芯22FDX®工艺,这种成像雷达将帮助实现全自动系统功能,并实现更加安全的自动汽车驾驶体验。 Arbe Robotics的雷达是世界首款实时显示1度分辨率的雷达,并在传感器和ADAS技术方面进行了必要的改进。Arbe致力于构建具有高分辨率、能够实现零误报的感应系统,让汽车能够完全依赖雷达提供的数据来做出决定。通过采用格芯的22FDX FD-SOI技术,这种新型芯片组将会增加芯片上的发射和接收通道,并且能够更好
[半导体设计/制造]
东芝推出支持高分辨率多媒体连接和摄像头设备的汽车娱乐信息辅助芯片
东芝公司推出该公司面向汽车市场的广泛的解决方案组合的一款新增产品。TC358791XBG汽车用辅助芯片(companion chip)的诞生,旨在推动用于联网汽车的下一代娱乐信息应用实现高分辨率多媒体(音频、视频)和摄像头连接。
样品出货即日起启动,而批量生产计划于2015年3月启动。
全新芯片支持适用于各种广泛应用的最新的汽车吉比特以太网(Gigabit Ethernet)AVB标准,例如前视、后视和环视摄像头、数字音频,以及向汽车音响本体和后座娱乐系统传送高分辨率视频内容。此外,凭借其适用于音频和视频的USB3.0、MIPI® CSI-2和DSI连接,TC358791XBG还可以无缝接入和支持市场上许多先进的汽车应
[嵌入式]
新突破—ams重点布局高分辨率全局快门CMOS图像传感器
随着万物互联时代的来临,图像传感可说是促进物联网应用的一个重要接口,为万物之“眼”。由于全球智能手机、安全产品以及人工智能的发展,图像传感器市场呈现火箭式增长,各大供应商也在加紧研发自己的图像传感技术以快速占领市场,紧追领先者们的步伐。 近日,艾迈斯半导体公司(ams AG)在京召开媒体圆桌会议,重点讨论了其全局快门CMOS图像传感器CMV 50000广泛的应用布局。ams图像传感器解决方案事业部(ISS)高级副总裁兼总经理Stephane Curral详细介绍了该款图像传感器的主要优势和应用领域,以及对ams图像传感器产品的整体布局和未来发展战略进行了详细阐述。 图像传感器分辨率新高度 CMV 50000是一款可提供
[半导体设计/制造]
高分辨率指数式数字电位器的设计
利用单片机对普通低分辨率线性数字电位器进行指数化及高分辨率的改造,使通用型数字电位器达到音频领域的应用要求,并具有较好的通用性与较高的性价比。
人耳对声强的主观感受遵循韦伯定律(Webber"s Law),在音量较小时人耳对声波振幅的改变感受灵敏,声音达到一定响度后,人耳的听觉特性开始变得迟钝。而指数型电位器的阻值变化规律为先慢后快,如果将这种衰减特性用在音量调节中,则恰好可以抵消人耳对音量感知的对数特性,保证主观听感的平滑。
与传统的机械式音量电位器相比,数字电位器(DCP)的阻值调节由内部CMOS开关控制,因而使用寿命长、可靠性高且不会产生机械噪声;如果将廉价的通用型线性数字电位器直接用于音量调节,在小音量状态下稍微
[模拟电子]
 遥感数字图像处理与分析 ENVI 5.x实验教程 第2版
遥感数字图像处理与分析 ENVI 5.x实验教程 第2版 卫星互联网 助力新基建的硬科技
卫星互联网 助力新基建的硬科技 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展
- Bourns 推出两款厚膜电阻系列,具备高功率耗散能力, 采用紧凑型 TO-220 和 DPAK 封装设计
- Bourns 全新高脉冲制动电阻系列问世,展现卓越能量消散能力
- Nexperia推出新款120 V/4 A半桥栅极驱动器,进一步提高工业和汽车应用的鲁棒性和效率
- 英飞凌推出高效率、高功率密度的新一代氮化镓功率分立器件
- Vishay 新款150 V MOSFET具备业界领先的功率损耗性能
- 强茂SGT MOSFET第一代系列:创新槽沟技术 车规级60 V N通道 突破车用电子的高效表现
- 面向车载应用的 DC/DC 电源






更多热门文章
更多每日新闻
更多往期活动
11月23日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号