摘要:单极性全桥逆变相对于双极性逆变损耗低,电磁干扰少,单极性SPWM更适用于逆变控制,但该控制方式存在一个过零点振荡。介绍了单极性逆变中的双边SPWM的控制方法,分析了这种控制方法在正弦波电压过零点附近的振荡现象,提出一种解决过零点振荡的方案,并经实验验证。
关键词:全桥逆变;单极性;正弦波脉宽调制;过零点振荡
0 引言
当前众多电源应用领域对交流电源的要求越来越高,传统的电网直接供电方式在很多场合已无法满足要求,因此,需要对电网或者其他能源处理后逆变输出。高质量的逆变电源已经成为电源技术的重要研究对象。全桥架构又是逆变器中非常重要的架构。全桥逆变控制方式主要分为双极性控制方式和单极性控制方式。双极性控制是对角的一对开关为同步开关,桥臂上下管之间除死区时间外为互补开关,控制相对简单,但是它的开关损耗高,存在很大的开关谐波,电磁干扰大,而单极性控制可以很好地解决这些问题。全桥逆变器单极性控制仅用一对高频开关,相对于双极性控制具有损耗低、电磁干扰小、无开关频率级谐波等优点,正在取代双极性逆变控制方式。但由于控制环路的延时作用,单极性控制方式的逆变器仍然受一个问题的困扰,即在过零点存在一个明显的振荡。单极性控制方式又包括单边方式和双边方式,双边方式相对于单边方式在抑止过零点振荡方面有一定优势[1],但仍然无法做到过零点的平滑过渡。为了提高逆变器的输出波形质量,本文分析了,单极性双边控制方式,分析了其振荡产生原因,并介绍一种解决过零点振荡的方案。
l 主电路拓扑
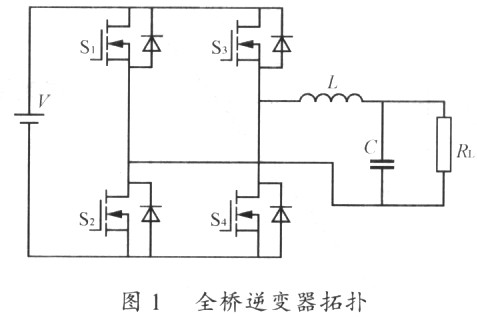
单极性SPWM逆变器如图1所示,由2组桥臂构成,一组桥臂(S3,S4)以高频开关工作频率工作,称为高频臂;另一组桥臂(S1,S2)以输出的正弦波频率进行切换,称为低频臂。
 2 单极性双边SPWM控制方式
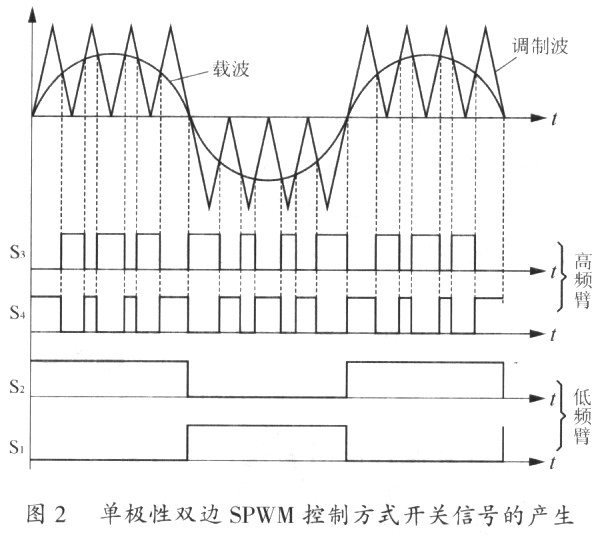
单极性逆变有两种产生SPWM的方法,分为单极性单边SPWM控制方式和单极性双边SPWM控制方式,文献l对此有比较详尽的介绍,这里只介绍过零点特性较好的双边控制方式,这种方式对于单边控制方式仍然有效。在单极性双边SPSM控制方式中,给定的载波信号按正弦方式变化,三角调制波信号,当输出电压为正时三角波为正,输出电压为负时三角波为负,如图2所示。高频臂上管S3的开关由载波与调制波相比较决定,载波幅值大于调制波则开通,载波幅值小于调制波则关断,除去死区时间,高频臂上管S3与高频臂下管S4的开关完全互补。这样即可得到SPWM规律的高频臂开关信号,实现逆变器的正弦波输出。
2 单极性双边SPWM控制方式
单极性逆变有两种产生SPWM的方法,分为单极性单边SPWM控制方式和单极性双边SPWM控制方式,文献l对此有比较详尽的介绍,这里只介绍过零点特性较好的双边控制方式,这种方式对于单边控制方式仍然有效。在单极性双边SPSM控制方式中,给定的载波信号按正弦方式变化,三角调制波信号,当输出电压为正时三角波为正,输出电压为负时三角波为负,如图2所示。高频臂上管S3的开关由载波与调制波相比较决定,载波幅值大于调制波则开通,载波幅值小于调制波则关断,除去死区时间,高频臂上管S3与高频臂下管S4的开关完全互补。这样即可得到SPWM规律的高频臂开关信号,实现逆变器的正弦波输出。
 3 过零点振荡分析
图3为双边SPWM控制方法在过零点附近的SPWM示意图。图中E1理论上为跟基准(电压波形)同相位的误差信号,由于在电压环和电流环两个环节中存在积分环节,实际的误差信号E2会与基准信号相差一个相位。图3中SPWM1是理论上的高频臂上管(S3)的驱动信号,SPWM2则是实际的高频臂上管(S3)的驱动信号。
3 过零点振荡分析
图3为双边SPWM控制方法在过零点附近的SPWM示意图。图中E1理论上为跟基准(电压波形)同相位的误差信号,由于在电压环和电流环两个环节中存在积分环节,实际的误差信号E2会与基准信号相差一个相位。图3中SPWM1是理论上的高频臂上管(S3)的驱动信号,SPWM2则是实际的高频臂上管(S3)的驱动信号。
 1)to~t1区间 由图3可以看到,在to~t1.区间,由于给定的低频臂信号为高电平l,对应主电路低频臂下管(S2)导通,图3中SPWM对应的高频臂上管(S3)的驱动信号,当误差信号(E1或E2)大于三角波,比较器输出高电平,小于则输出低电平,以此获得SPWM1或SPWM2。由图3可以知道在to~t1区间,输出正弦波由正逐渐变为O。由于E2滞后于理想的误差信号E1,,在t1时刻正
半波向负半波转变时E2会大于E1,造成的影响就是过零点附近实际的占空比SPWM2要大于SPWM1。理论上此时的正弦波输出逐步减小到零,到零后再进行低频臂的切换,而事实上并不是降到零就会进行低频臂的切换。
2)t1"t2区间 实际的输出误差信号E2滞后于E1一个相位,在该相位内,误差信号E2为正,始终大于调制波信号,因此高频臂上管(S3)始终开通,下管(S4)始终关断。在该时段内,SPWM偏离了正弦波调制的规律,因此输出也就无法维持正弦波规律。这个时段与控制环的参数有关,一般在数百μs左右,表现为正弦波在过零点有一个振荡。
4 过零点振荡的观察结果
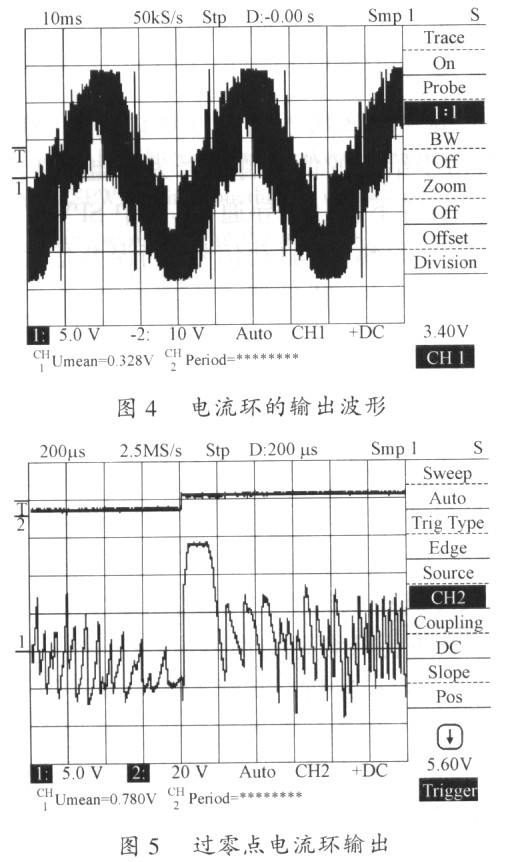
以一个单极性双边SPWM控制的110v/25Hz逆变器为例。电流环的输出如图4所示,在过零点处有一个很明显的振荡。将该振荡展开,如图5所示,CHl为电流环输出,CH2为低频臂信号。可见在低频臂切换后,电流环的输出会有一个过冲,这个过冲会达到运放的饱和值,持续时间100"200μs。这个控制信号过冲在逆变输出中的表现为过零点有一个过冲,从正向到负向的切换表现为向下的过冲,负向到正向的切换表现为一个向上的过冲,大为影响了输出波形的平滑性。逆变输出过零点的观察结果如图6。过冲的峰值达到了22V,相对于110V的峰值电压156V,扰动相对值为14%。由实验观察可以比较出,电压环在低频臂切换点的响应很微弱,不足以造成大的振荡。由于电流环则因为其快速反应的特性,出现了饱和现象,而电流环的输出直接送至PWM发生器,因此会直接反映在逆变器的输出上。
1)to~t1区间 由图3可以看到,在to~t1.区间,由于给定的低频臂信号为高电平l,对应主电路低频臂下管(S2)导通,图3中SPWM对应的高频臂上管(S3)的驱动信号,当误差信号(E1或E2)大于三角波,比较器输出高电平,小于则输出低电平,以此获得SPWM1或SPWM2。由图3可以知道在to~t1区间,输出正弦波由正逐渐变为O。由于E2滞后于理想的误差信号E1,,在t1时刻正
半波向负半波转变时E2会大于E1,造成的影响就是过零点附近实际的占空比SPWM2要大于SPWM1。理论上此时的正弦波输出逐步减小到零,到零后再进行低频臂的切换,而事实上并不是降到零就会进行低频臂的切换。
2)t1"t2区间 实际的输出误差信号E2滞后于E1一个相位,在该相位内,误差信号E2为正,始终大于调制波信号,因此高频臂上管(S3)始终开通,下管(S4)始终关断。在该时段内,SPWM偏离了正弦波调制的规律,因此输出也就无法维持正弦波规律。这个时段与控制环的参数有关,一般在数百μs左右,表现为正弦波在过零点有一个振荡。
4 过零点振荡的观察结果
以一个单极性双边SPWM控制的110v/25Hz逆变器为例。电流环的输出如图4所示,在过零点处有一个很明显的振荡。将该振荡展开,如图5所示,CHl为电流环输出,CH2为低频臂信号。可见在低频臂切换后,电流环的输出会有一个过冲,这个过冲会达到运放的饱和值,持续时间100"200μs。这个控制信号过冲在逆变输出中的表现为过零点有一个过冲,从正向到负向的切换表现为向下的过冲,负向到正向的切换表现为一个向上的过冲,大为影响了输出波形的平滑性。逆变输出过零点的观察结果如图6。过冲的峰值达到了22V,相对于110V的峰值电压156V,扰动相对值为14%。由实验观察可以比较出,电压环在低频臂切换点的响应很微弱,不足以造成大的振荡。由于电流环则因为其快速反应的特性,出现了饱和现象,而电流环的输出直接送至PWM发生器,因此会直接反映在逆变器的输出上。
 5 解决方案
由上面的分析可知,对于单极性SPWM全桥逆变器,由于它的电流环和电压环都存在积分环节,因此,误差信号相对于给定信号不可避免存在一个延迟,这个延迟在非零点附近不会对系统的输出造成影响。但是,在过零点附近,由于单极性SPWM需要换向,积分环节的延迟就会造成一个振荡。这是由控制系统本身缺陷所致,若要消除该振荡,就需要改进控制系统,以消除积分环节延迟的影响。
图7所示为电流环积分电容上的电压,在低频臂切换后出现了一个过冲。这是因为在切换点电流环的快速切换,需要运放在大约100"200μs里传递一个较大的能量,而积分电容吸收了这部分能量,造成运放的输出端不能快速地跟踪这个转换。因此,如果在切换点使电流环在约1001μs的时段内由积分环节变为比例环节,将会有效地避免这个充放电过程,从而避免丁运放输出点的过冲,也避免了逆变器过零点的振荡。
5 解决方案
由上面的分析可知,对于单极性SPWM全桥逆变器,由于它的电流环和电压环都存在积分环节,因此,误差信号相对于给定信号不可避免存在一个延迟,这个延迟在非零点附近不会对系统的输出造成影响。但是,在过零点附近,由于单极性SPWM需要换向,积分环节的延迟就会造成一个振荡。这是由控制系统本身缺陷所致,若要消除该振荡,就需要改进控制系统,以消除积分环节延迟的影响。
图7所示为电流环积分电容上的电压,在低频臂切换后出现了一个过冲。这是因为在切换点电流环的快速切换,需要运放在大约100"200μs里传递一个较大的能量,而积分电容吸收了这部分能量,造成运放的输出端不能快速地跟踪这个转换。因此,如果在切换点使电流环在约1001μs的时段内由积分环节变为比例环节,将会有效地避免这个充放电过程,从而避免丁运放输出点的过冲,也避免了逆变器过零点的振荡。
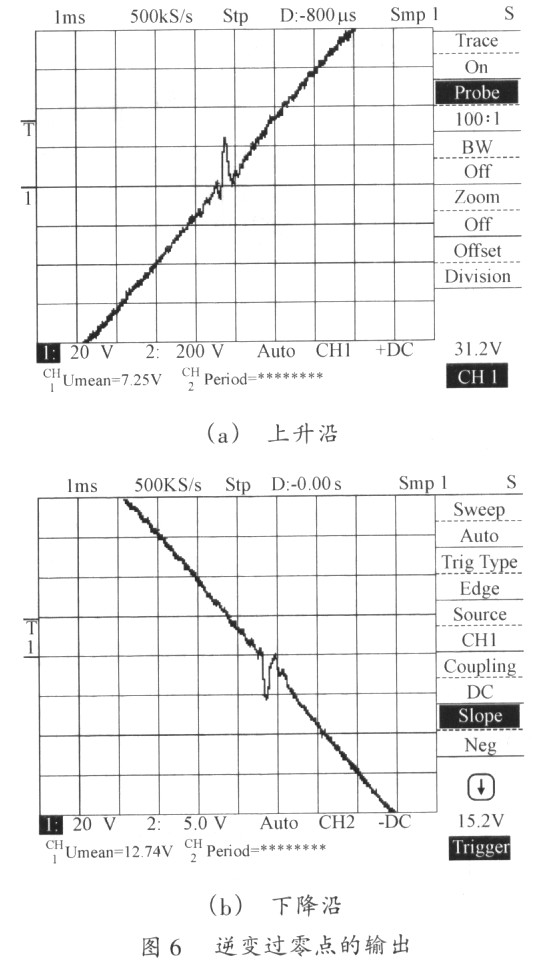
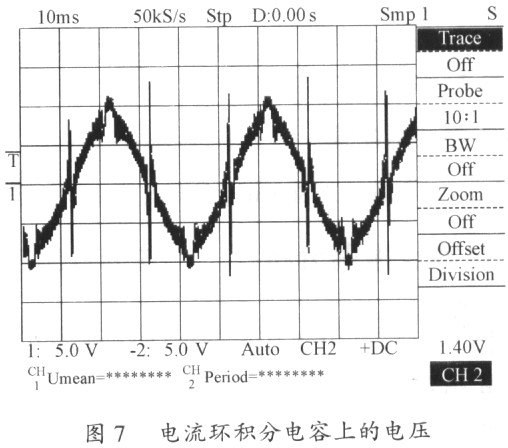 图8提出了一种解决过零点振荡的调整电路方案。在该过零点调整电路中引入了G1、G2信号(低频臂的上下桥臂的驱动信号),它们在低频臂上下桥臂切换时发出一个约100μs的脉冲,这个脉冲开通光耦,将电流环上的积分电容短路,实现了切换阶段的比例环节。
图8提出了一种解决过零点振荡的调整电路方案。在该过零点调整电路中引入了G1、G2信号(低频臂的上下桥臂的驱动信号),它们在低频臂上下桥臂切换时发出一个约100μs的脉冲,这个脉冲开通光耦,将电流环上的积分电容短路,实现了切换阶段的比例环节。
 6 实验结果
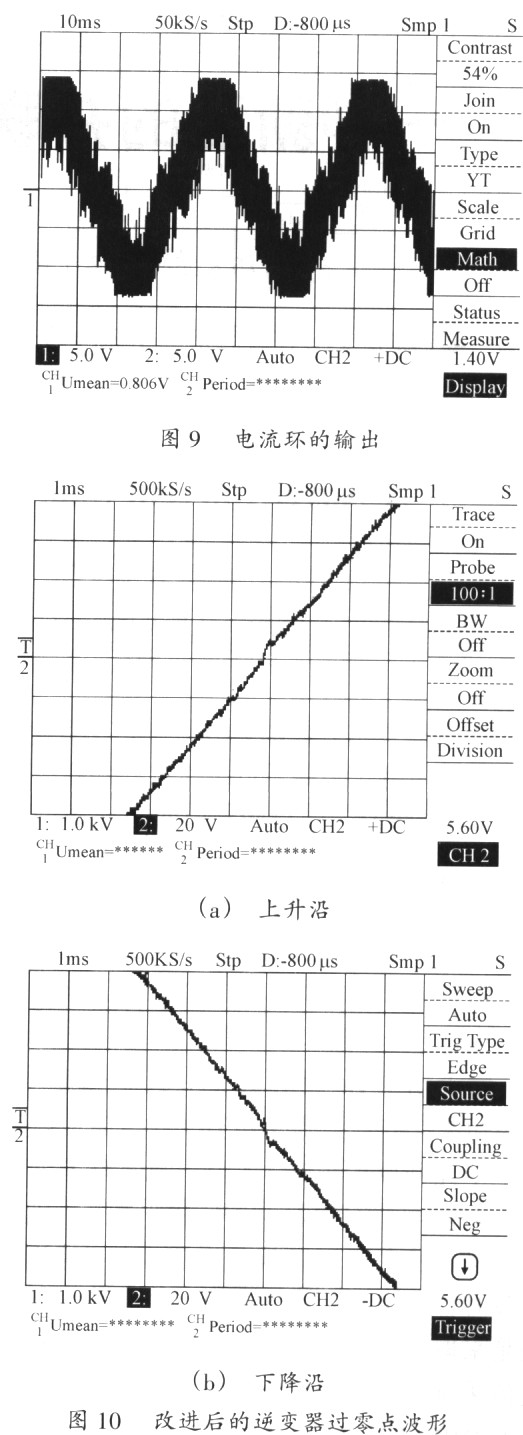
如图9所示,在加入过零点调整电路后,电流环的输出中消除了过零点的过冲。如图10所示,逆变器的输出在过零点消除了振荡现象,相对于未加过零点凋整电路,逆变器过零点非常平滑。
6 实验结果
如图9所示,在加入过零点调整电路后,电流环的输出中消除了过零点的过冲。如图10所示,逆变器的输出在过零点消除了振荡现象,相对于未加过零点凋整电路,逆变器过零点非常平滑。
 7 结语
单极性双边SPWM控制方式的全桥逆变器,因为控制环路的积分延时效应造成过零点的明显振荡,可以通过修改过零点阶段的电流控制环特性来消除积分效应,使得逆变器输出过零点波形平滑,提高了逆变器的输出质量。实验结果表明该方案切实可行。
7 结语
单极性双边SPWM控制方式的全桥逆变器,因为控制环路的积分延时效应造成过零点的明显振荡,可以通过修改过零点阶段的电流控制环特性来消除积分效应,使得逆变器输出过零点波形平滑,提高了逆变器的输出质量。实验结果表明该方案切实可行。
编辑: 引用地址:全桥逆变单极性SPWM控制方式过零点振荡的研究
2 单极性双边SPWM控制方式
单极性逆变有两种产生SPWM的方法,分为单极性单边SPWM控制方式和单极性双边SPWM控制方式,文献l对此有比较详尽的介绍,这里只介绍过零点特性较好的双边控制方式,这种方式对于单边控制方式仍然有效。在单极性双边SPSM控制方式中,给定的载波信号按正弦方式变化,三角调制波信号,当输出电压为正时三角波为正,输出电压为负时三角波为负,如图2所示。高频臂上管S3的开关由载波与调制波相比较决定,载波幅值大于调制波则开通,载波幅值小于调制波则关断,除去死区时间,高频臂上管S3与高频臂下管S4的开关完全互补。这样即可得到SPWM规律的高频臂开关信号,实现逆变器的正弦波输出。
3 过零点振荡分析
图3为双边SPWM控制方法在过零点附近的SPWM示意图。图中E1理论上为跟基准(电压波形)同相位的误差信号,由于在电压环和电流环两个环节中存在积分环节,实际的误差信号E2会与基准信号相差一个相位。图3中SPWM1是理论上的高频臂上管(S3)的驱动信号,SPWM2则是实际的高频臂上管(S3)的驱动信号。
1)to~t1区间 由图3可以看到,在to~t1.区间,由于给定的低频臂信号为高电平l,对应主电路低频臂下管(S2)导通,图3中SPWM对应的高频臂上管(S3)的驱动信号,当误差信号(E1或E2)大于三角波,比较器输出高电平,小于则输出低电平,以此获得SPWM1或SPWM2。由图3可以知道在to~t1区间,输出正弦波由正逐渐变为O。由于E2滞后于理想的误差信号E1,,在t1时刻正
半波向负半波转变时E2会大于E1,造成的影响就是过零点附近实际的占空比SPWM2要大于SPWM1。理论上此时的正弦波输出逐步减小到零,到零后再进行低频臂的切换,而事实上并不是降到零就会进行低频臂的切换。
2)t1"t2区间 实际的输出误差信号E2滞后于E1一个相位,在该相位内,误差信号E2为正,始终大于调制波信号,因此高频臂上管(S3)始终开通,下管(S4)始终关断。在该时段内,SPWM偏离了正弦波调制的规律,因此输出也就无法维持正弦波规律。这个时段与控制环的参数有关,一般在数百μs左右,表现为正弦波在过零点有一个振荡。
4 过零点振荡的观察结果
以一个单极性双边SPWM控制的110v/25Hz逆变器为例。电流环的输出如图4所示,在过零点处有一个很明显的振荡。将该振荡展开,如图5所示,CHl为电流环输出,CH2为低频臂信号。可见在低频臂切换后,电流环的输出会有一个过冲,这个过冲会达到运放的饱和值,持续时间100"200μs。这个控制信号过冲在逆变输出中的表现为过零点有一个过冲,从正向到负向的切换表现为向下的过冲,负向到正向的切换表现为一个向上的过冲,大为影响了输出波形的平滑性。逆变输出过零点的观察结果如图6。过冲的峰值达到了22V,相对于110V的峰值电压156V,扰动相对值为14%。由实验观察可以比较出,电压环在低频臂切换点的响应很微弱,不足以造成大的振荡。由于电流环则因为其快速反应的特性,出现了饱和现象,而电流环的输出直接送至PWM发生器,因此会直接反映在逆变器的输出上。
5 解决方案
由上面的分析可知,对于单极性SPWM全桥逆变器,由于它的电流环和电压环都存在积分环节,因此,误差信号相对于给定信号不可避免存在一个延迟,这个延迟在非零点附近不会对系统的输出造成影响。但是,在过零点附近,由于单极性SPWM需要换向,积分环节的延迟就会造成一个振荡。这是由控制系统本身缺陷所致,若要消除该振荡,就需要改进控制系统,以消除积分环节延迟的影响。
图7所示为电流环积分电容上的电压,在低频臂切换后出现了一个过冲。这是因为在切换点电流环的快速切换,需要运放在大约100"200μs里传递一个较大的能量,而积分电容吸收了这部分能量,造成运放的输出端不能快速地跟踪这个转换。因此,如果在切换点使电流环在约1001μs的时段内由积分环节变为比例环节,将会有效地避免这个充放电过程,从而避免丁运放输出点的过冲,也避免了逆变器过零点的振荡。
图8提出了一种解决过零点振荡的调整电路方案。在该过零点调整电路中引入了G1、G2信号(低频臂的上下桥臂的驱动信号),它们在低频臂上下桥臂切换时发出一个约100μs的脉冲,这个脉冲开通光耦,将电流环上的积分电容短路,实现了切换阶段的比例环节。
6 实验结果
如图9所示,在加入过零点调整电路后,电流环的输出中消除了过零点的过冲。如图10所示,逆变器的输出在过零点消除了振荡现象,相对于未加过零点凋整电路,逆变器过零点非常平滑。
7 结语
单极性双边SPWM控制方式的全桥逆变器,因为控制环路的积分延时效应造成过零点的明显振荡,可以通过修改过零点阶段的电流控制环特性来消除积分效应,使得逆变器输出过零点波形平滑,提高了逆变器的输出质量。实验结果表明该方案切实可行。
上一篇:开关稳压电源
下一篇:一种实用的BOOST电路
 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术 HCMP96850SID
HCMP96850SID
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
- 英飞凌推出符合ASIL-D标准的新型汽车制动系统和电动助力转向系统三相栅极驱动器 IC
- 南芯科技推出80V升降压转换器,持续深耕工业储能市场
- 法雷奥与罗姆联合开发新一代功率电子领域
- 贸泽电子开售能为电动汽车牵引逆变器提供可扩展性能的 英飞凌HybridPACK Drive G2模块
- Vishay推出采用eSMP®系列SMF(DO-219AB)封装的全新1 A和2 A Gen 7 1200 V FRED Pt®超快恢复整流器
- Littelfuse推出高性能超级结X4-Class 200V功率MOSFET
- 恩智浦发布首个超宽带无线电池管理系统解决方案
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号