在无刷直流电机伺服控制系统中,无位置传感器的位置检测是关键。无位置传感器具有体积小、精度高、可靠性好、易于维护等优点,在伺服系统中得到广泛的应用。常用的转子位置检测法有反电动势法、磁链估计法、卡尔曼滤波等技术,比较成熟和常用的是反电动势检测技术。他是通过测量三相端电压,检测反电势过零点得到转子相位信号进行换相。但是在低速的情况下,由于噪声的干扰,反电动势的幅值相对于噪声信号小,不易检测出反电动势,从而引起电机失步。自适应噪声抵消法是以噪声干扰信号为处理对象,利用噪声信号和原始被测信号不相关的特点,自适应地调整滤波器的传递特性,将噪声干扰抑制或者非常大的衰减,提高信号传输中的信噪比。而自适应LMS滤波算法计算简单,易于实时信号处理,运用广泛。因此本文提出基于自适应噪声抵消技术的反电动势检测法,以中心点作为干扰信号,端电压作为带干扰信号的信号源,利用信号源和噪声干扰不相关的特性,提炼出反电动势而获得过零点进行位置检测。
1设计原理
1.1 自适应噪声基本原理
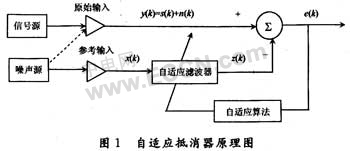
信号源被传送到信号传感器,会附加不相关的噪声n(k),合并的信号为y(k)=s(k)+n(k)进入抵消器。噪声传感器的输出x(k)经参数可调的数字滤波器后送入抵消器产生的输出信号x(k),根据两噪声信号相关和信号噪声独立的特性,利用自适应算法调节数字滤波器的参数,使得输出信号z(k)逼近信号源迭加的噪声n(k),这样抵消器的输出信号e(k)逼近被测信号s(k)。如图1所示。
1.2 自适应滤波算法
自适应滤波采用的最优准则有最小均方误差准则、最小二乘准则、最大信噪比准则、最大似然准则、统计检测准则以及一些改进的最优准则。这里可以采用最小均方差误差准则。
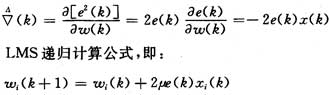
LMS算法是用瞬时功率梯度代替均方误差梯度矢量的方法,即:
迭代算法步骤如下:
(1)初始化,选定初始权值ω(k)。
(2)计算k时刻滤波器的输出为z(k)=ωT(k)x(k)。
(3)抵消器误差输出e(n)e(k)=y(k)-z(k)。
(4)下一时刻权向量更新为w(k+1)=ω(k)+2μe(k)x(k)。
(5)k=k+1,跳转到步骤(2),重复迭代,直到算法收敛。
算法稳定性取决于两个因素,自适应步长参数μ和自相关矩阵R。算法收敛件是0<μ<1/λmax,λmax是相关矩阵R的最大特征值,权值向量趋近最佳维纳解。μ的取值和滤波器的阶数成反比,根据滤波器的阶数取不同的步长,可以保证较好的处理结果。另一个指标参数Ψ衡量稳态失调量,定义为平均超调均方误差和最小均方误差之比。失调近似表示为![]() ,Ψ和μ成正比。当滤波器阶数一定时,μ的大小控制着算法的收敛速度和达到稳态的失调量的大小。收敛速度和失调量是一对矛盾,选用较大的μ,有较快的收敛速度,但是由于大的卢值相应的信噪比小,会导致较大的失调量;过渡过程出现振荡,不能收敛。μ取值过小信噪比大,但收敛速度会很慢,所以取值要折中。
,Ψ和μ成正比。当滤波器阶数一定时,μ的大小控制着算法的收敛速度和达到稳态的失调量的大小。收敛速度和失调量是一对矛盾,选用较大的μ,有较快的收敛速度,但是由于大的卢值相应的信噪比小,会导致较大的失调量;过渡过程出现振荡,不能收敛。μ取值过小信噪比大,但收敛速度会很慢,所以取值要折中。
1.3 无刷直流电机无位置检测
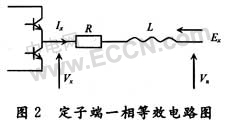
如图2所示,Vx为某一相对地端电压,三相绕组星型连接,Vn为中心点对地电压,EX是反电动势,R,L,IX分别为相电阻、相电感和相电流。绕组等效电路方程为:

对于星型两相导通,三相电流之和等于0,导通两相反电动势大小相等,方向相反,在未导通相反电势过零瞬间,将三个方程相加得到:
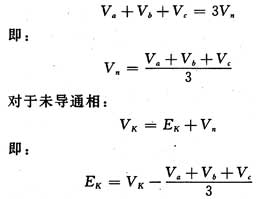
由上式可以很容易检测到反电势过零点,移相30°即可得到换相点。低速时反电势淹没在噪声信号中不易检测。运用噪声抵消技术,将中心点Vn作为噪声源,端电压Vk为信号源,经自适应滤波器处理后,噪声输出在幅值和相位上逼近Vn,和VK相减输出反电势。
2 计算机仿真分析及性能分析
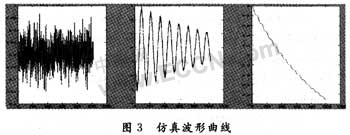
运用Matlab对自适应滤波器进行模拟仿真,可以很容易地观察波形,为此笔者编制相应程序,得到输入信号源波形曲线、权矢量迭代曲线和输出误差波形曲线。
这里信号源采用正弦波混合高斯白噪声,正弦波信号s=sin*(0.05*n),干扰噪声randn(1,2^10)呈(0,1)正态分布,横坐标迭代1 024个数据点,步长参数μ取0.001,FIR阶数取10,可以完全模拟无刷直流电的端电压和中心点电压信号。
从仿真结果看出,在第一幅仿真曲线表示的原始信号中,正弦信号完全掩盖在噪声信号中,很难用通用的滤波方法提取出来。采用LMS的自适应FIR滤波方法后,在第二幅曲线图中,可以得到噪声抵消后有用的正弦信号波形曲线。输出e(n)经过一段时间振荡幅值逐渐减小,接近期望正弦信号。第三幅权矢量变化图中,随着e(n)收敛,W逐渐趋向最佳滤波系数W0。
3 自适应滤波器的DSP实现
TMS230LF240X系列芯片是TI公司生产的24X系列定点DSP产品,具有处理性能好,外设集成度高、程序存储量大、A/D转换速度快、I/O口资源丰富等优点,性能优越、功耗小、成本低,可以对电机进行高效实用的数字化控制。这里利用DSP的部分模块完成自适应LMS噪声抵消功能。
3.1 整体框图
该芯片ADC采样通道数最多可以是16个转换通道,因此可以采样三相端电压和中心点电压四路模拟量。从图4看出,参考输入有两个主通道,分别接电机非导通端电压信号端和中心点信号端,经初步低通滤波后送人DSP的A/D模块,离散成数字输入量进行信号处理。转换结束后,经低通滤波器平滑信号后将转换后的信号存放在该通道相应的寄存器中。
要实现系数的迭代,可以采用循环寻址的方式,用RPT指令可以实现。首先初始化B模块、ARk寄存器,累加器。B1块存放权系数ωi(n),采样信号x(n-N+1)放在B0里,块长N为滤波器的阶数。AR0指向ωi(n)地址,AR1指向x(n-N+1)地址,AR2指向期望信号y(n)。用MPYA将两部分数据乘积结果加到累加器。用RPT重复执行存放指令N-1次,程序寄存器指针指向下一个采样信号值,更新累加器值。
4 结语
自适应噪声抵消系统是基于自适应滤波原理的扩展,在数字语音信号处理中可以有效地提取适用的语音信号,有效降噪,提高信号处理质量。本文将这一思想运用到电机的噪声处理中,结合端电压检测法,将反电动势提炼出来。仿真结果表明自适应噪声抵消法能有效去噪,使得电机在启动和低速运转时也能正常检测,方案简单可行。基于LMS算法存在收敛特性和失调量受步长影响,最优步长不太容易确定,因此可以采用NLMS、RLS等改进的LMS算法,效果更加理想。
上一篇:2010年全球传感器市场将超600亿美元
下一篇:电流传感器在控制和保护门进系统中的应用
推荐阅读最新更新时间:2024-03-30 21:27

 全相位数字信号处理方法及MATLAB实现
全相位数字信号处理方法及MATLAB实现 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用





- Vishay 推出新款精密薄膜MELF电阻,可减少系统元器件数量,节省空间,简化设计并降低成本
- 芯原推出新一代高性能Vitality架构GPU IP系列 支持DirectX 12和先进的计算能力
- NXP 2.5亿美元收购Aviva,但车载SerDes领域依然处于战国时期
- 应对 AI 时代的云工作负载,开发者正加速向 Arm 架构迁移
- 沉浸式体验漫威宇宙,英特尔锐炫显卡为《漫威争锋》提供Day 0支持
- 艾迈斯欧司朗与法雷奥携手革新车辆内饰,打造动态舱内环境
- 《嵌入式-STM32开发指南》第二部分 基础篇 - 第7章DMA(HAL库)
- 【“源”察秋毫系列】DC-DC电源效率测试,确保高效能与可靠性的关键步骤
- NVIDIA 推出高性价比的生成式 AI 超级计算机
- Mapbox与Arm合作推出虚拟主机 加速软件定义汽车导航




 京公网安备 11010802033920号
京公网安备 11010802033920号