1 引言
人们生活以及工业生产经常涉及到液位和流量的控制问题,例如饮料、食品加工,居民生活用水的供应,溶液过滤,污水处理,化工生产等多种行业的生产加工过程, 通常要使用蓄液池。蓄液池中的液位需要维持合适的高度,太满容易溢出造成浪费,过少则无法满足需求。因此,需要设计合适的控制器自动调整蓄液池的进出流量,使得蓄液池内液位保持正常水平,以保证产品的质量和生产效益。这些不同背景的实际问题都可以简化为某种水箱的液位控制问题。因此液位是工业控制过程中一个重要的参数。特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的生产效果。
传统的液位控制系统大多采用PLC和组态软件来实现,也有用单片机控制的系统,是所谓的实时测控系统。但是在实际生产中,绝大多数的工业对象的时间常数通常在秒级到分钟级的范围内。因此除了少数小时间常数的对象外,可以由计算机系统来直接安全、有效地完成连续生产中的过程自动控制任务。
现代计算机技术和信息技术的迅猛发展,冲击着国民经济的各个领域,也引起了测量仪器和测试技术的巨大变革。自从1986年美国国家仪器公司(National Instruments Corp,简称NI)提出虚拟仪器的概念以后,虚拟仪器由于其性价比、开放性等优势迅速地占领了市场。虚拟仪器技术最核心的思想,就是利用计算机的硬/软件资源,使本来需要硬件实现的技术软件化(虚拟化),以便最大限度地降低系统成本,增强系统的功能与灵活性[1]。基于软件在VI系统中的重要作用,NI提出了“软件就是仪器(The software is the instrument)”的口号。本文利用美国NI公司的LabVIEW开发的液位控制系统已经在实验室条件下对单容液位对象实施了自动控制,取得了较好的调节效果。
2 系统结构
2.1 控制对象
该系统为FESTO紧凑型过程控制实验装置,如图1所示。水箱B102为控制对象,水箱B101用于储水,执行装置是泵P101。

图1 液位控制系统实验装置示意图
2.2 控制原理
系统采用的数据采集卡为NI公司M系列的PCI6221多功能数据采集卡,具有16路单端输入通道或8路差分输入通道,采集速度最高为250K/s,分辨率为16位,两路模拟输出通道,最高转换速率为833K/s,分辨率为16位。此外还有两个32位的定时计数器,24路数字量输入输出通道,满足系统的控制要求。
利用超声传感器把液位信号变为0-10v的电压信号,经NI-6221数据采集卡的模拟输入通道采集到计算机,由LabVIEW编写的控制器根据实测信号和设定值发出控制信号,经NI-6221数据采集卡的模拟输出通道输出0-10v的信号控制泵的驱动器,从而改变泵的转速,达到控制液位的目的,系统组成结构如图2所示[2]。该系统的主要功能有:实时数据采集和显示,实时PID及其它算法控制和数据存储。

图2 计算机液位控制系统组成框图
3 系统软件设计
NI公司的LabVIEW是一种非常优秀的面向对象的图形化编程语言,是一个开放型的开发环境,它使用图标代替文本代码创建应用程序,拥有大量与其它应用程序通信的VI库。作为目前国际上主流的基于数据流的编译型图形编程环境,它可以把复杂、烦琐、费时的语言编程简化成用简单或图标提示的方法选择功能(图形),并用线条把各种图形连接起来的简单图形编程方式,使得不熟悉编程的工程技术人员都可以按照测试要求和任务快速设计出自己的程序和仪器面板,这大大提高了工作效率,减轻了科研和工程技术人员的工作量[1]。因此本设计选用LabVIEW作为开发语言。
3.1 软件结构
软件采用模块化设计[3],共分为7个模块:用户管理模块,参数设置模块,数据采集模块,工艺流程模块,实验项目模块,数据保存回放模块以及帮助模块。主要完成以下功能:
1)显示水箱的液位实时变化;
2)数据保存及历史数据分析;
3)液位的两点控制;
4)参数设置及修改;
5)测量并绘制水箱的阶跃相应曲线;
6)PID控制器以及滤波器的设计。
3.2 两点控制
当液位低于下限值时,泵开始工作,液位上升;当液位高于上限值时,泵停止工作,液位下降,使得液位一直处于一定的范围之内。液位的测量范围在20mm-300mm。
3.3 PID控制
常规的PID控制是从比例、积分、微分三个环节来实现对系统的控制的。PID控制模块采用PID工具包,利用它可以在LabVIEW环境下通过界面进行交互式的PID控制器的设计,充分利用了LabVIEW和NI的硬件无缝连接的特点,可以迅速搭建所需的控制系统。PID控制的程序如图3所示。

图3 PID模块的程序框图
4 实验控制结果及分析
4.1 两点控制结果
对液位进行两点控制试验结果如图4所示,较好的满足了控制的要求。

图4 两点控制实验结果
4.2 PID控制结果
由于液位控制系统的滞后效应较小,所以采用比例调节或比例积分调节两种调节规律。对于控制参数的选取,利用阶跃响应曲线法得到传递函数[5],结合MATLAB仿真得到控制参数指导试验[6]。经过反复试验在设定值为90mm-180mm范围内,最佳的参数为:,控制结果如图5所示,结果优于系统技术指标要求。
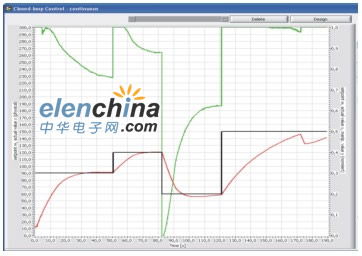
图5 实际的PID控制曲线()
5 结论
设计的虚拟仪器系统具有友好的人机界面,经过实际测试系统稳定可靠,控制响应速度快,曲线变化平稳,完全满足了液位控制要求,充分体现了虚拟仪器的特点。尤其是其扩展性很好,可以随时添加更加先进的控制算法以及其它如流量、压力控制功能,而且开发周期很短。本文设计的液位控制系统已经成功的应用于教学和实验中,取得了良好的调节效果。因此,该系统具有推广使用价值。
上一篇:基于双计算机的仿人机器人的视觉跟踪系统
下一篇:状态监控装置提供设备运行状态视窗
推荐阅读最新更新时间:2024-03-30 21:28

 控制系统仿真 (张袅娜 冯雷)
控制系统仿真 (张袅娜 冯雷) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号