0 引言
中央空调系统的设计是以室内空气参数为基本依据,通过对整个空调系统新风、回风的温度、湿度、送风风机运行状态、初效过滤段的压差等现场信号的采集,根据所设计的控制策略控制送风风机的变频调速、加湿器的加湿、冷、热水阀门的开度大小来达到设定的空气状态,且根据室内、外空气的状态(温度、湿度)确定系统的运行工况,在保证生产工艺的要求的前提下,使空调系统运行合理、安全、可靠、能耗低等,使控制效果达到最优。一般系统中的被控参数可设定为两个:室内温度和湿度。常规恒温恒湿中央空调系统是一个多输入、多输出的控制系统。因为回风温、湿度与室内温、湿度的变化情况有一致性,所以常把系统回风温、湿度作为被控参数,控制回路采用多个回路的PID控制。但由于空调系统传递滞后较大,且是一个干扰大、高度非线性、随机干扰因素多的系统,参数整定困难,一组整定好的参数只能在较小的范围内有较好的控制效果,当参数变化超过一定范围时,系统控制效果变差,致使普通PID控制难以满足要求。我们文章针对以上情况,结合航天科工集团某研究所光学加工楼新风系统自动控制项目,我们运用模糊控制技术,采用一种基于模糊控制规则的控制方法设计出恒温恒湿中央空调控制系统,具有超调小、调节迅速和上升时间短的特点,且具有很好的鲁棒性。
1 制冷空调系统模型
制冷空调的实际控制对象大多可用高阶的微分方程来描述。为了分析简便,我们常用低阶模型来近似描述控制对象的动态特性,只要能满足一定的控制精度。
在自动控制系统中一阶惯性环节定义的微分方程是一阶的,且输出响应需要一定的时间才能达到稳态值。因此中央空调系统中表冷器、电动水阀都可以近似的用一阶惯性环节来表示,而房间作为系统的控制对象,根据能量守恒定律,可建立控制对象房间的微分方程,它是一个二阶系统,但在工业控制中我们往往用纯迟延的一阶模型来代替,仿真结果表明,用带纯迟延的一阶模型来近似描述控制对象完全可以满足实际应用的要求。温度检测和变送环节也有一定的时间滞后,但和控制对象房间的时间常数相比,可以忽略不计,因此温度检测和变送环节可以近似用一阶比例环节来代替。
2 模糊温度控制器的设计
模糊控制(fuzzy control)是一种对系统控制的宏观方法,加入了控制规则,规则通常采用“IF-THEN”方式来表达实际控制中的专家知识和规则,其最大的特征是将专家的控制经验、知识表达成语言控制规则,用规则去控制目标系统,特别适用于那些数学模型未知的、复杂的、非线性系统进行控制。
模糊控制系统的结构如图1所示。
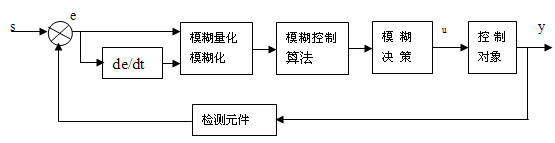
图1
设计模糊控制器的第一步是确定语言变量、语言值和隶属度函数。本文涉及的模糊控制器有两个输入信号和一个输出信号,分别为:
1) 输入语言变量之一,记为e,是温度设定值和回风温度的偏差,e=s-y。
2) 输入语言变量之二,记为de/dt是偏差的变化率。
3) 输出语言变量,记为u,是电动水阀的控制电压,单位为V,对应电动水阀的开度。
输入语言变量e的取值:{负大,负中,负小,零,正小,正中, 正大},表示符号 {NB,NM,NS,ZE,PS,PM,PB}。语言值隶属度函数选择三角形,如图2(a)所示。
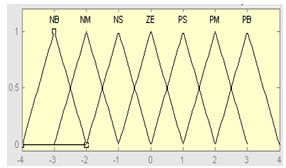
图2 a
输入语言变量de/dt的取值:{负大,负中,负小,零,正小,正中,正大},表示符号{NB,NM,NS,ZE,PS,PM,PB}。语言值隶属度函数选择三角如图2(b)所示。

图2 b
输出变量u的取值:{关闭,微开,小开,半开,小半开,大半开,全开},表示符号{CB,CM,CS,M,OS,OM,OB}。语言值隶属度函数选择梯形,如图2(c)所示。

图2 c
每个语言变量所取的语言值,所对应的语言值隶属函数都是交叉重叠的。初始设定时,可采用均匀等分的方式布置,然后再根据系统仿真或实际的控制结果进行合理的调整。
设计模糊控制器的第二步是引入模糊推断、逻辑实现和控制决策推断。而推断逻辑是由一组IF-THEN的控制规则组成的。这一组控制规则的形成来源于实际经验的总结。
从经验出发,用语言形式表达表达推理控制决策过程如下:
IF{温度设定值和回风温度偏差过大AND偏差有变大的趋势}THEN{电动水阀全开};
IF{温度设定值和回风温度偏差过小AND偏差有变小的趋势}THEN{电动水阀全闭};
类似于上述的一系列控制规则集中在控制规则表中。
在应用模糊控制器实际进行实时控制时,一定的偏差e和偏差变化率de/dt,对应的就有某一些IF-THEN控制规则生效,而这些生效的控制规则产生一个综合推断结论,并通过解模糊过程转换为一个确定的输出值,从而给定电动水阀的控制电压,对应于电动水阀的开度。我们应用了模糊逻辑的min-max合成运算获得综合推断控制决策,并通过mom法,进行解模糊,产生确定的控制调节作用。
3 系统仿真
MATLAB中的模糊逻辑工具箱提供了大量的对输入、输出变量进行模糊化(隶属度函数)的函数(总共提供了11种隶属度函数),可以很方便的完成对变量的模糊化。在模糊控制箱中只需给定输入、输出变量的隶属度函数即可完成对变量的模糊化。
3.1 输入、输出变量的模糊化
图3所示的模糊控制系统为双输入单输出系统,输入为偏差e和偏差的变化率,输出为u,我们可根据前边给定的输入、输出变量的隶属度函数,在模糊逻辑控制箱添加隶属度函数就可以完成模糊变量的模糊化过程。
3.2 模糊控制规则
MATLAB中的模糊逻辑工具箱提供了规则库,将模糊控制规则添加到规则库即可。模糊控制规则是设计一个模糊控制器的关键,该规则给定的好坏将直接影响到所设计的模糊控制器的性能好坏。
3.3 反模糊化
MATLAB中的模糊逻辑工具箱提供反模糊化方法(总共提供5种反模糊化方法,即centriod, bisector, mom, lom, som),我们选用其中的mom法,即可对所设计的模糊控制系统进行仿真。
3.4 仿真结果
通过上述工作,完成对模糊控制器的设计,在模糊控制系统仿真框图中加入模糊控制器,通过调用相应的模糊推理矩阵,即可对所设计的模糊控制系统进行仿真。
在仿真过程中可根据系统仿真或实际的控制结果调整输入、输出的隶属度函数,一直调整到理想的控制效果为止。
上述模糊控制系统的阶跃响应曲线如图3所示。为了分析比较,对上述系统的控制效果与传统的PID控制效果放在一个坐标系里。从系统仿真曲线看,PID控制器的系统响应曲线有超调,过渡时间比较长,而模糊控制器的系统响应曲线比较平稳,没有超调。
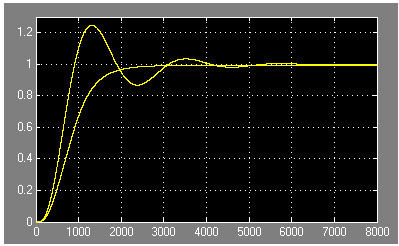
图3
4 结论
使用以上设计的模糊控制器,通过计算机实现实时控制。根据偏差和偏差变化值的大小,再利用模糊控制规则确定电动水阀的输出,从而取得了良好的控制效果,能实时地对温度进行监控,具有以下特点:
1)和普通PID控制器控制效果相比,采用模糊控制器后系统响应超调小,响应曲线平稳。
2)系统具有良好的响应速度、稳定性和精确性,且具有较强的鲁棒性。
3)由模糊控制规则确定的三个参数是动态变化的,更符合空调系统的控制特点。
所以说模糊控制器可以克服普通PID控制器的局限性,在中央空调自动控制中具有广泛的应用价值。
上一篇:基于CIEDE 2000的陶瓷砖小色差检测研究
下一篇:创新的带钢热处理解决方案
推荐阅读最新更新时间:2024-03-30 21:32

 高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著)
高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号