摘要:由于异步电机软启动过程中非线性时变的特点,采用传统的PID控制方法难以达到理想的控制效果。为了大大减小交流电机启动过程中的电流,在此结合智能控制理论,设计出一种新型的模糊PID软启动控制器。通过对电流大小进行控制,优化了系统的控制效果,实现了交流电机恒流软启动控制。最后通过Matlab仿真,证实了该系统具有良好的动静态性能,达到了平稳启动的目的,具有有效性和广泛应用性。
关键词:软启动;模糊控制;异步电动机;Matlab
0 引言
异步电机以其优良的性能及无需维护的特点,在工农业中得到广泛应用。三相异步电机的启动方法很多,比如直接启动、自耦降压启动、延边三角形启动等等。对于风机泵类等恒功率负载,如果在额定电压下直接启动三相异步电机,启动电流非常大(一般为Ie的5~8倍),易引起电网电压下降,同时影响电网上其他用电设备的正常运行,这对于电机本身来讲,冲击电流造成局部温升过大,降低电机寿命,给机械系统带来强大的机械冲力,冲击电流会以电磁波的形式干扰电气仪表的正常运行。因此宜采用软启动的方法。
1 模糊PID软启动电路的结构及原理
模糊PID复合控制方法最大的优点是不依赖于被控对象精确的数学模型,适合于非线性、强耦合、不确定性的电机软启动复杂系统。异步电机软启动主回路结构见图1,利用三对反并联的单向晶闸管来实现交流调压,晶闸管调压的控制方式采用相位控制,用来改变晶闸管的相位角α,得到不同的电压(频率不变),从而实现电机的平稳启动。
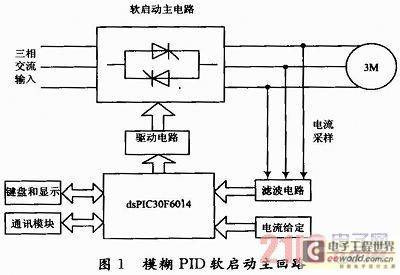
交流电机定子电流经过滤波后与启动电流给定值一起作为模糊PID调节器的输入信号。dsPIC30F6014型单片机首先计算出启动电流设定值与反馈电流的偏差和偏差的变化率,然后以电流及电流的偏差作为输入量,经过模糊化后进行模糊推理,最后将模糊推理结果通过解模糊后作为输出调节量。解模糊调节器输出的触发信号,送至驱动电路,由触发角决定每个周期触发脉冲的产生时刻,从而调节晶闸管的输出电压,从而起到限制启动电流,减小冲击转矩的作用。
2 控制系统设计
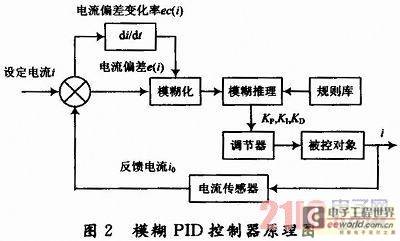
人们运用模糊数学的基本理论和方法,把规则的条件和操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊PID控制。模糊PID控制器以误差e和误差变化率ec作为输入,利用模糊控制规则在线对PID的3个参数进行调整,以满足不同时刻的e和ec对PID参数自整定的要求。模糊PID控制器的基本结构如图2所示。在交流电机软启动的过程中,通过检测启动电流i设定值的偏差,以及偏差的变化率,这两种检测信号作为模糊PID控制器的两个输入,分别用e(kt),ec(kt)表示,输出为KP,KI,KD,再通过反模糊化,经过调节器输出控制晶闸管的导通角,调整电压的输出,进而达到电机平稳软启动的要求。
(1)模糊化
在电机软启动控制器系统中设计模糊PID控制器时,采用双输入/三输出模式的Fuzzy控制器结构。分别用e(kT),ec(kT)表示,输出为KP,KI,KD。为了方便描述,定义如下:

式中:T为采样时间;I(kT)为启动电流给定值;I0(kT)为第k个采样时刻的电流输出。
(2)数据库的建立
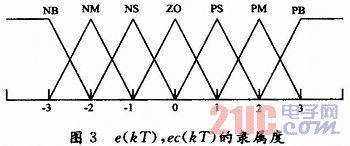
设e(kT),ec(kT)的论域为:X={-3,-2,-1,0,1,2,3},在其论域上取7个变量NB,NM,NS,ZO,PS,PM,PB。对变量e(kt),ec(kt)采用均匀分布的高斯三角隶属函数,如图3所示。图3中e(kT),ec(kT)的隶属度。
(3)规则库和模糊推理
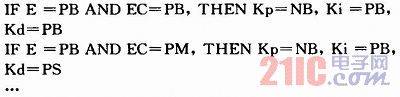
模糊控制器的规则库是基于专家知识或手动操作人员长期积累的经验,根据各参数的规则表进行模糊推理。模糊推理如下:
(4)解模糊
输出量为KP,KI,KD,其论域、语言变量e(kT),ec(kT)一样,此处采用加权平均解模糊的方法,即:
式中:U(kT)为清晰化值;Ui(kT)为模糊控制器输出;μc(Ui(kT))为对应于Ui(kT)的隶属度。
(2)数据库的建立
设e(kT),ec(kT)的论域为:X={-3,-2,-1,0,1,2,3},在其论域上取7个变量NB,NM,NS,ZO,PS,PM,PB。对变量e(kt),ec(kt)采用均匀分布的高斯三角隶属函数,如图3所示。图3中e(kT),ec(kT)的隶属度。
(3)规则库和模糊推理
模糊控制器的规则库是基于专家知识或手动操作人员长期积累的经验,根据各参数的规则表进行模糊推理。模糊推理如下:
(4)解模糊
输出量为KP,KI,KD,其论域、语言变量e(kT),ec(kT)一样,此处采用加权平均解模糊的方法,即:
式中:U(kT)为清晰化值;Ui(kT)为模糊控制器输出;μc(Ui(kT))为对应于Ui(kT)的隶属度。
关键字:PID
引用地址:
一种新的模糊PID控制在电机软启动中的仿真
推荐阅读最新更新时间:2024-03-30 21:47
PID控制电机分析
PID控制电机是指通过PID控制器来控制电机的转速、位置或者转矩等参数,实现对电机的精确控制。PID控制器是一种基于误差的控制算法,其通过不断调节控制信号,使输出信号接近期望值,从而实现对系统的控制。 在控制电机中,PID控制器通常用来控制电机的转速或者位置。具体来说,PID控制器的输入是电机的误差信号,即期望值与实际值之间的差值,输出是电机的控制信号,例如电压或者电流。PID控制器通过对误差信号进行比例、积分和微分处理,来实现对电机控制信号的调节 具体地说,比例项 $K_p$ 用来控制控制信号与误差信号之间的比例关系,增大比例增益可以提高电机的响应速度,但也可能导致超调和不稳定。积分项 $K_i$ 用来消除系统的稳态误差
[嵌入式]
基于PID控制粉尘浓度测量仪的实现
摘要:为了扩大粉尘测量仪的测量范围,采用一种自适应的测量方法,即根据被测环境粉尘的浓度自动调节传感器的接收灵敏度,并结合相应的软件算法,使高、低浓度的粉尘都能得到有效测量。在设计过程中运用PID算法对测量过程进行控制,使测量仪在运行中进行实时调节,以降低测量数据的振荡。通过对烟雾释放出粉尘的浓度测量,运用Matlab对测量数据进行拟合,得到了平滑的响应曲线。实测结果表明,该方法有效地扩大了测量范围,使测量范围达到了0.01~48 mg/m3。 关键词:自适应;粉尘测量;PID;数字滤波 随着我国现代工业的发展,空气中粉尘的污染越来越严重,这一污染严重危害着人类健康,因此粉尘浓度的测量在治理环境污染,保护人类健康领域
[工业控制]
DCS及PLC控制系统中PID的运算及应用
现在国内外一些著名的品牌厂家几乎论断的整个工业自动化控制领域,如:国外的有艾默生、西门子;国内的有:浙大中控、和利时等,那么在这些控制系统中最常规的 PID 控制是怎么实现的,他们又是怎么进行编程组态得到的PLD运算的,本文就常规的PID及起模块进行总结以及应用做个简单的介绍: 一、DCS及PLC控制系统中PID的运算 1 指令解说 l 上式T为梯形图时间继电器周期输出,在此引为采样及调节周期。 l S1为设定的目标值,又称给定值 l S2为实际测定值。 l S3为PID控制参数的起始参数单元,控制参数占用S3后续的25个D数据寄存器。具体说明如下: S3+0: TS 采样时间 设定为K1(1T)
[嵌入式]
自己整的PID程序(C51,增量式PID)
void PID(void) { //调差量 VW88 , 电压反馈量VW50,pid运算反馈量:VW10,pid给定:VW700 int VW700,VW50; //0-32768~+32768 int VW500,VW502,VW504,VW506; long VW530,VW538; int VW526,VW522,VW524; uchar Kp=7; //P 取值0-20 书:20 PLC试验得3\1\7 uchar Ki=4; //I 取值0-20 书:01 uchar Kd=4 ; //D 取值0-10 书:18 VW700=GeiDin; //给定 最大1100 VW50
[单片机]
数字PID控制的原理
数字PID控制的原理 自从计算机和各类微控制器芯片进入控制领域以来,用计算机或微控制器芯片取代模拟 PID控制电路组成控制系统,不仅可以用软件实现 PID 控制算法,而且可以利用计算机和微控制器芯片的逻辑功能,使 PID 控制更加灵活。将模拟PID 控制规律进行适当变换后,以微控制器或计算机为运算核心,利用软件程序来实现 PID 控制和校正,就是数字(软件)PID 控制。 由于数字控制是一种采样控制,它只能根据采样时刻的偏差值来计算控制量,因此需要对连续 PID 控制算法进行离散化处理。对于实时控制系统而言,尽管对像的工作状态是连续的,但如果仅在离散的瞬间对其采样进行测量和控制,就能够将其表示成离散模型,当采样周期
[嵌入式]

增量式pid控制 单片机源程序
单片机源程序如下: #include reg51.h #include intrins.h #include absacc.h #include define.h #include delay.h #include da0832.h #include DS18B20_5.h #include lcd1602.h #include zlg.h #define PMAX 100 #define PMIN 0 typedef struct { char kp,ki,kd; int e2,e1,e0; long pa,vpa; }mypid; mypid p1; int final_tem,cur
[单片机]
小型PLC控制系统常用的参数及PID指令汇总
一、 参数使用说明
S1:目标值(SV)
S2:测定值(PV)
S3:参数 D:输出值(MV) 32位指令名称为DPID 其16位之
S3参数表如下所示:参数代号 参 数 名 称 数 值 范 围
S3 取样时间(Ts) 1~2000(%sec)
S3+1 比例增益(KP) 0~30000(%)
S3+2 积分增益(KI) 0~30000(%)
S3+3 微分增益(KD) 0~30000(%)
S3+4 动作方向(Dir) 0~2
S3+5 偏差量(E)不作用范围 0~32767
S3+6 输出值(MV)饱和上限 -327
[嵌入式]
PID系统校正方法简介
一、重温一下系统结构 以炉温控制系统为例,仔细观察一下其原理图及框图。思考一下:哪些环节可以随时更改或者说容易调整? 应该容易理解:对于一个已经搭建成型的系统,其中某些模块或者环节基本上就难以再修改了,除非重建。例如上面这个炉温控制系统,其中的燃油炉、混合器、已铺设好的各个管路、阀门及驱动阀门的电机等,更换或者重建的成本是比较高的。 再换一个角度,对于一个控制工程师,不可能所有东西都是自己设计制作的,例如上面炉温控制系统中,传感器、电机、阀门、管道、混合器、燃油炉等基本都是在市场上选购的。这些模块的特性是相对固定的,较难改动。 但是放大器电路(可能包含软、硬件)是控制工程师设计的,那么是可以根据系统整体性能要求去调整改变的。
[嵌入式]







 控制系统仿真 (张袅娜 冯雷)
控制系统仿真 (张袅娜 冯雷) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号