引 言
嵌入式系统的核心是嵌入式微处理器和嵌入式操作系统。早期的嵌入式系统硬件核心是各种类型的8位和16位单片机;而近年来32位处理器以其高性能、低价格,得到了广泛的应用。近年来,又出现了另一类数据密集处理型芯片DSP。DSP由于其特殊的结构、专门的硬件乘法器和特殊的指令,使其能快速地实现各种数字信号处理及满足各种高实时性要求。随着现代嵌入式系统的复杂度越来越高,操作系统已成为嵌入式系统不可缺少的部分。免费的嵌入式操作系统,如Linux等,随着自身不断的改善,得到了飞速的发展。Linux是一个免费的、强大的、可信赖的、具有可伸缩性与扩充性的操作系统。Linux实现了许多现代化操作系统的理论,并且支持完整的硬件驱动程序、网络通信协议与多处理器的架构,其源码的公开更有利于操作系统嵌入式应用。
基于上述分析,笔者开发了基于ARM和DSP芯片的双核嵌入式系统。系统充分利用了ARM和DSP的各自特点,既可以使用ARM和DSP芯片进行协同开发,也可以利用ARM或DSP进行独立开发。操作系统选用了Linux,以利于充分发挥系统的效能。
1 系统的总体设计
由于ARM芯片的控制性能较强,在嵌入式系统中ARM主要用于控制和少量的数据处理。这样,一方面要求CPU要低功耗和有足够的时钟频率来运行操作系统,以满足便携式的要求;另一方面也要求其有足够种类的接口,以利于性能的扩展。基于以上考虑,在开发平台中选用HY7202作为CPU。
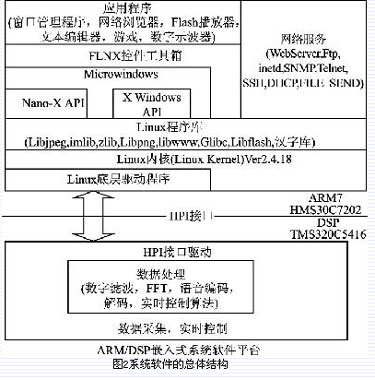
DSP作为数据运算部分,可以充分发挥其对数字信号处理的独特优势。TI公司的C54xx系列16位定点DSP以其高性价比普遍应用于各类通信、便携式应用当中。考虑到对数字视频和数字图像等大数据吞吐量应用场合的处理要求,选用TI公司的TMS320C5416芯片。其时钟频率最高可达到206 MHz,系统总体框图如图1所示。
 系统软件平台结构如图2所示,软件平台分ARM部分和DSP部分,以及ARM和DSP的接口软件设计部分。ARM部分以Hynix公司PATCH的ARM Linux Version 2.4.18为操作系统,并在此基础之上移植Linux标准库GLIBC、LIBJPG、LIBPNG、IMLIB、LIBWWW、LIBFLASH及汉字库。图形界面以Microwindows 0.9及其控件库FLNX提供嵌入式图形界面平台。系统平台具有强大的网络通信功能,通过平台WEBSERVER、FTP、TELNET、INETD等网络工具和应用程序能方便地开发基于Internet的网络终端、远程控制、远程数据采集、远程数据处理产品。在应用程序层上,系统平台集成窗口管理程序,全中文化网络浏览器(支持HTML、XML),Flash播放器(支持Flash4、Flash5、Flash6),文本编辑器,游戏等用于PDA开发,机顶盒上网解决方案,以及可用于嵌入式数据采集、处理的虚拟示波器等。
系统软件平台结构如图2所示,软件平台分ARM部分和DSP部分,以及ARM和DSP的接口软件设计部分。ARM部分以Hynix公司PATCH的ARM Linux Version 2.4.18为操作系统,并在此基础之上移植Linux标准库GLIBC、LIBJPG、LIBPNG、IMLIB、LIBWWW、LIBFLASH及汉字库。图形界面以Microwindows 0.9及其控件库FLNX提供嵌入式图形界面平台。系统平台具有强大的网络通信功能,通过平台WEBSERVER、FTP、TELNET、INETD等网络工具和应用程序能方便地开发基于Internet的网络终端、远程控制、远程数据采集、远程数据处理产品。在应用程序层上,系统平台集成窗口管理程序,全中文化网络浏览器(支持HTML、XML),Flash播放器(支持Flash4、Flash5、Flash6),文本编辑器,游戏等用于PDA开发,机顶盒上网解决方案,以及可用于嵌入式数据采集、处理的虚拟示波器等。
 DSP部分通过提供完整的HPI驱动程序(DSP部分)及通信协议,通过增加相应数据处理程控制算法程序,利用HPI并行接口与主机ARM通信进行数据交换,可用于各种实时处理,控制领域。
此外,DSP和ARM可以各自作为独立的系统使用,它们均有完整的子系统软件。子系统之间联系的核心是DSP器件本身带有的HPI接口。
2 ARM和DSP的通信接口设计
(1) DSP的HPI口介绍
HPI是TMS320C54X等芯片提供的一种并行端口,专门用于DSP和外部主机并行通信。HPI接口有标准HPI接口和增强型HPI接口。对于C5416和C5420DSP器件,它们的主机接口为增强型主机接口。标准HPI接口是一个8位总线接口,通过2个8位字节组合在一起形成1个16字。增强型HPI接口分8位和16位两种。8位增强型主机接口和标准HPI接口操作时序一样,主要区别在于标准型只能访问2 KB专用RAM,而增强型可以访问DSP的整个RAM区。16位增强型HPI接口采用16位总线,只要一个主机操作就能完成访问操作。
(2) HPI硬件连线
HMS30C7202与TMS320C5416接口电路如图3所示。系统将HPI接口所有控制寄存器、地址寄存器、数据寄存器统一编址,映射到HMS30C7202物理地址0X0C000000开始的I/O内存空间。
DSP部分通过提供完整的HPI驱动程序(DSP部分)及通信协议,通过增加相应数据处理程控制算法程序,利用HPI并行接口与主机ARM通信进行数据交换,可用于各种实时处理,控制领域。
此外,DSP和ARM可以各自作为独立的系统使用,它们均有完整的子系统软件。子系统之间联系的核心是DSP器件本身带有的HPI接口。
2 ARM和DSP的通信接口设计
(1) DSP的HPI口介绍
HPI是TMS320C54X等芯片提供的一种并行端口,专门用于DSP和外部主机并行通信。HPI接口有标准HPI接口和增强型HPI接口。对于C5416和C5420DSP器件,它们的主机接口为增强型主机接口。标准HPI接口是一个8位总线接口,通过2个8位字节组合在一起形成1个16字。增强型HPI接口分8位和16位两种。8位增强型主机接口和标准HPI接口操作时序一样,主要区别在于标准型只能访问2 KB专用RAM,而增强型可以访问DSP的整个RAM区。16位增强型HPI接口采用16位总线,只要一个主机操作就能完成访问操作。
(2) HPI硬件连线
HMS30C7202与TMS320C5416接口电路如图3所示。系统将HPI接口所有控制寄存器、地址寄存器、数据寄存器统一编址,映射到HMS30C7202物理地址0X0C000000开始的I/O内存空间。
 利用地址线RA\[3:0\]产生HPI访问所需的控制信号。A0与A1决定访问寄存器类型。A2决定访问的是第一个字节还是第二个字节:A2=0时,表示写入的数据为第一个字节;A2=1时,表示写入的数据为第二个字节。在HPI-8中所有地址线和控制线是在HDS1和HDS2的下降沿采样,而不是由HR/W决定,因此HR/W通过地址线A3表示当前操作是读还是写,而数据锁存信号由nRCS3和nRW0相与后共同产生。KSCAN[2]设置为HMS30C7202的PORTA中断输入脚,DSP通过中断方式与Linux底层HPI驱动程序通信。
3 ARM和DSP的通信接口驱动程序设计
Linux是Unix操作系统的一种变种。在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它和DOS或Window环境下的驱动程序有很大的区别。Linux驱动程序可以编译进内核,也可以模块形式动态地加入和卸载。Linux的这种特点可根据目标系统裁减内核,更适合于嵌入式系统。
(1) Linux驱动程序基本原理
在Linux中所有设备分为字符设备、块设备和网络设备三种,所有设备都看成普通文件,因此可以通过用操纵普通文件相同的系统调用来打开、关闭、读取和写入设备。系统中每个设备都用一种设备特殊文件来表示。
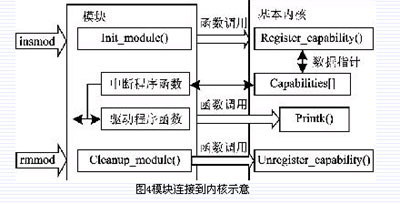
在Linux中,设备驱动程序是一组相关函数的集合。它包含设备服务子程序和中断处理程序,每个设备服务子程序只处理一种设备或者紧密相关的设备。其目的就是从与设备无关的软件中接受抽象的命令并执行。当执行一条请求时,具体操作是根据控制器驱动程序提供的接口,并利用中断机制去调用中断服务子程序配合设备来完成这个请求。设备程序利用结构file_operations与文件系统联系起来。在Linux下驱动程序装载如图4所示。
利用地址线RA\[3:0\]产生HPI访问所需的控制信号。A0与A1决定访问寄存器类型。A2决定访问的是第一个字节还是第二个字节:A2=0时,表示写入的数据为第一个字节;A2=1时,表示写入的数据为第二个字节。在HPI-8中所有地址线和控制线是在HDS1和HDS2的下降沿采样,而不是由HR/W决定,因此HR/W通过地址线A3表示当前操作是读还是写,而数据锁存信号由nRCS3和nRW0相与后共同产生。KSCAN[2]设置为HMS30C7202的PORTA中断输入脚,DSP通过中断方式与Linux底层HPI驱动程序通信。
3 ARM和DSP的通信接口驱动程序设计
Linux是Unix操作系统的一种变种。在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它和DOS或Window环境下的驱动程序有很大的区别。Linux驱动程序可以编译进内核,也可以模块形式动态地加入和卸载。Linux的这种特点可根据目标系统裁减内核,更适合于嵌入式系统。
(1) Linux驱动程序基本原理
在Linux中所有设备分为字符设备、块设备和网络设备三种,所有设备都看成普通文件,因此可以通过用操纵普通文件相同的系统调用来打开、关闭、读取和写入设备。系统中每个设备都用一种设备特殊文件来表示。
在Linux中,设备驱动程序是一组相关函数的集合。它包含设备服务子程序和中断处理程序,每个设备服务子程序只处理一种设备或者紧密相关的设备。其目的就是从与设备无关的软件中接受抽象的命令并执行。当执行一条请求时,具体操作是根据控制器驱动程序提供的接口,并利用中断机制去调用中断服务子程序配合设备来完成这个请求。设备程序利用结构file_operations与文件系统联系起来。在Linux下驱动程序装载如图4所示。
 (2) HPI驱动程序
HPI接口可用I/O端口方式,也可以用I/O存取方式。系统平台采用I/O存取方式,将HPI访问控制寄存器、数据寄存器、地址寄存器,映射到内存物理地址为0X0C000000开始的空间,通过访问存储器指令对HPI进行操作。HPI具体物理地址定义如下:
#defineHPI_BASE0X0C000000//HPI基地址
#define HPD_READ_LOWHPI_BASE+0X0012
//读数据寄存器第一字节
#define HPA_WRITE_HIGHHPI_BASE+0X000C
//写地址寄存器第二字节
在Linux下,类似Windows,程序不能直接访问物理地址。设备驱动程序是内核的一部分,它像内核中其他代码一样运行在内核模式,驱动程序如果出错就会使系统受到严重破坏,因此需要将物理地址映射到内核空间。在Linux下通过virtul_address=(u32)ioremap(HPI_BASE,HPI_LENGTH)实现。驱动程序主要结构如下:
struct file_operations hpi_fops={
owner:THIS_MODULE,
read: hpi_read,
write: hpi_write,
poll : hpi_poll,
open: hpi_open,
release: hpi_release,
};
HPI通信协议采用帧结构,由于增强型HPI接口允许访问DSP内部RAM所有空间,系统通信在DSP内部分配2 K字(16位)作为帧缓冲区,读写各1 K字,协议采用一位滑动窗口协议。帧格式如表1所列。
(2) HPI驱动程序
HPI接口可用I/O端口方式,也可以用I/O存取方式。系统平台采用I/O存取方式,将HPI访问控制寄存器、数据寄存器、地址寄存器,映射到内存物理地址为0X0C000000开始的空间,通过访问存储器指令对HPI进行操作。HPI具体物理地址定义如下:
#defineHPI_BASE0X0C000000//HPI基地址
#define HPD_READ_LOWHPI_BASE+0X0012
//读数据寄存器第一字节
#define HPA_WRITE_HIGHHPI_BASE+0X000C
//写地址寄存器第二字节
在Linux下,类似Windows,程序不能直接访问物理地址。设备驱动程序是内核的一部分,它像内核中其他代码一样运行在内核模式,驱动程序如果出错就会使系统受到严重破坏,因此需要将物理地址映射到内核空间。在Linux下通过virtul_address=(u32)ioremap(HPI_BASE,HPI_LENGTH)实现。驱动程序主要结构如下:
struct file_operations hpi_fops={
owner:THIS_MODULE,
read: hpi_read,
write: hpi_write,
poll : hpi_poll,
open: hpi_open,
release: hpi_release,
};
HPI通信协议采用帧结构,由于增强型HPI接口允许访问DSP内部RAM所有空间,系统通信在DSP内部分配2 K字(16位)作为帧缓冲区,读写各1 K字,协议采用一位滑动窗口协议。帧格式如表1所列。
 结语
本文介绍了使用ARM和DSP双CPU构成的双核嵌入式系统的硬件平台,以及源代码开放的Linux作为嵌入式系统中操作系统的方法,给出了系统设计的总体框图,详细介绍了ARM和DSP通信接口的设计。这一设计方法可以适用于大多数现代嵌入式系统的设计,有一定的实用价值。
结语
本文介绍了使用ARM和DSP双CPU构成的双核嵌入式系统的硬件平台,以及源代码开放的Linux作为嵌入式系统中操作系统的方法,给出了系统设计的总体框图,详细介绍了ARM和DSP通信接口的设计。这一设计方法可以适用于大多数现代嵌入式系统的设计,有一定的实用价值。
引用地址:ARM/DSP双核系统的通信接口设计
系统软件平台结构如图2所示,软件平台分ARM部分和DSP部分,以及ARM和DSP的接口软件设计部分。ARM部分以Hynix公司PATCH的ARM Linux Version 2.4.18为操作系统,并在此基础之上移植Linux标准库GLIBC、LIBJPG、LIBPNG、IMLIB、LIBWWW、LIBFLASH及汉字库。图形界面以Microwindows 0.9及其控件库FLNX提供嵌入式图形界面平台。系统平台具有强大的网络通信功能,通过平台WEBSERVER、FTP、TELNET、INETD等网络工具和应用程序能方便地开发基于Internet的网络终端、远程控制、远程数据采集、远程数据处理产品。在应用程序层上,系统平台集成窗口管理程序,全中文化网络浏览器(支持HTML、XML),Flash播放器(支持Flash4、Flash5、Flash6),文本编辑器,游戏等用于PDA开发,机顶盒上网解决方案,以及可用于嵌入式数据采集、处理的虚拟示波器等。
DSP部分通过提供完整的HPI驱动程序(DSP部分)及通信协议,通过增加相应数据处理程控制算法程序,利用HPI并行接口与主机ARM通信进行数据交换,可用于各种实时处理,控制领域。
此外,DSP和ARM可以各自作为独立的系统使用,它们均有完整的子系统软件。子系统之间联系的核心是DSP器件本身带有的HPI接口。
2 ARM和DSP的通信接口设计
(1) DSP的HPI口介绍
HPI是TMS320C54X等芯片提供的一种并行端口,专门用于DSP和外部主机并行通信。HPI接口有标准HPI接口和增强型HPI接口。对于C5416和C5420DSP器件,它们的主机接口为增强型主机接口。标准HPI接口是一个8位总线接口,通过2个8位字节组合在一起形成1个16字。增强型HPI接口分8位和16位两种。8位增强型主机接口和标准HPI接口操作时序一样,主要区别在于标准型只能访问2 KB专用RAM,而增强型可以访问DSP的整个RAM区。16位增强型HPI接口采用16位总线,只要一个主机操作就能完成访问操作。
(2) HPI硬件连线
HMS30C7202与TMS320C5416接口电路如图3所示。系统将HPI接口所有控制寄存器、地址寄存器、数据寄存器统一编址,映射到HMS30C7202物理地址0X0C000000开始的I/O内存空间。
利用地址线RA\[3:0\]产生HPI访问所需的控制信号。A0与A1决定访问寄存器类型。A2决定访问的是第一个字节还是第二个字节:A2=0时,表示写入的数据为第一个字节;A2=1时,表示写入的数据为第二个字节。在HPI-8中所有地址线和控制线是在HDS1和HDS2的下降沿采样,而不是由HR/W决定,因此HR/W通过地址线A3表示当前操作是读还是写,而数据锁存信号由nRCS3和nRW0相与后共同产生。KSCAN[2]设置为HMS30C7202的PORTA中断输入脚,DSP通过中断方式与Linux底层HPI驱动程序通信。
3 ARM和DSP的通信接口驱动程序设计
Linux是Unix操作系统的一种变种。在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它和DOS或Window环境下的驱动程序有很大的区别。Linux驱动程序可以编译进内核,也可以模块形式动态地加入和卸载。Linux的这种特点可根据目标系统裁减内核,更适合于嵌入式系统。
(1) Linux驱动程序基本原理
在Linux中所有设备分为字符设备、块设备和网络设备三种,所有设备都看成普通文件,因此可以通过用操纵普通文件相同的系统调用来打开、关闭、读取和写入设备。系统中每个设备都用一种设备特殊文件来表示。
在Linux中,设备驱动程序是一组相关函数的集合。它包含设备服务子程序和中断处理程序,每个设备服务子程序只处理一种设备或者紧密相关的设备。其目的就是从与设备无关的软件中接受抽象的命令并执行。当执行一条请求时,具体操作是根据控制器驱动程序提供的接口,并利用中断机制去调用中断服务子程序配合设备来完成这个请求。设备程序利用结构file_operations与文件系统联系起来。在Linux下驱动程序装载如图4所示。
(2) HPI驱动程序
HPI接口可用I/O端口方式,也可以用I/O存取方式。系统平台采用I/O存取方式,将HPI访问控制寄存器、数据寄存器、地址寄存器,映射到内存物理地址为0X0C000000开始的空间,通过访问存储器指令对HPI进行操作。HPI具体物理地址定义如下:
#defineHPI_BASE0X0C000000//HPI基地址
#define HPD_READ_LOWHPI_BASE+0X0012
//读数据寄存器第一字节
#define HPA_WRITE_HIGHHPI_BASE+0X000C
//写地址寄存器第二字节
在Linux下,类似Windows,程序不能直接访问物理地址。设备驱动程序是内核的一部分,它像内核中其他代码一样运行在内核模式,驱动程序如果出错就会使系统受到严重破坏,因此需要将物理地址映射到内核空间。在Linux下通过virtul_address=(u32)ioremap(HPI_BASE,HPI_LENGTH)实现。驱动程序主要结构如下:
struct file_operations hpi_fops={
owner:THIS_MODULE,
read: hpi_read,
write: hpi_write,
poll : hpi_poll,
open: hpi_open,
release: hpi_release,
};
HPI通信协议采用帧结构,由于增强型HPI接口允许访问DSP内部RAM所有空间,系统通信在DSP内部分配2 K字(16位)作为帧缓冲区,读写各1 K字,协议采用一位滑动窗口协议。帧格式如表1所列。
结语
本文介绍了使用ARM和DSP双CPU构成的双核嵌入式系统的硬件平台,以及源代码开放的Linux作为嵌入式系统中操作系统的方法,给出了系统设计的总体框图,详细介绍了ARM和DSP通信接口的设计。这一设计方法可以适用于大多数现代嵌入式系统的设计,有一定的实用价值。
上一篇:基于GPRS的SOCKET通信的应用研究
下一篇:基于脉冲同步的混沌保密通信系统
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 INA101SM-BSS3
INA101SM-BSS3










 京公网安备 11010802033920号
京公网安备 11010802033920号