根据世界卫生组织公布的数据,全世界目前有3 000多万人目盲,其中约有18%是中国人。针对盲人行动不便的情况,本文介绍了一种基于超声相控阵的盲人避障系统。
本文综合超声波的导盲设计,采用超声相控阵技术对障碍物进行探测,核心控制器件STM32为ST公司推出的基于CORTEX内核的32位MCU,具有丰富的外设和强大的数据处理能力。通过它对外围电路的控制,及其强大的信号处理能力,实瑰障碍物的探测以及环境的判断。
1 系统组成及原理
本设计是利用意法半导体有限公司推出的基于CORTEX 内核的高性能 32 位 MCU,STM32F103RBT6为核心硬件。多个超声探头按照一定规则组成的超声相控阵,通过芯片与探头及外围电路共同组成的信号发送与识别系统完成导盲避障功能。系统工作原理方框示意图如图1所示。
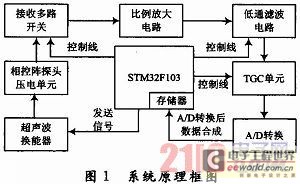
系统采用超声相控阵以多发一收的形式完成障碍探测。具体方案如下:超声信号的工作频率是40 kHz,首先STM32F103RBT6 MCU产生40 kHz的方波信号,工作时各个探头按照预定的延迟时间依次发送5个周期的方波信号。根据不同的延时时间,超声相控阵发出的信号能够在前方9个点实现不同情况的聚焦。这9个点分布于超声相控阵前方的左、中、右3个方向上,每个方向有上、中、下3个点。其中左右以及上下方向的偏转角度设为30°。聚焦深度为1.5 m。信号从发射到在聚焦点返回,所需时间约为8.8 ms。所以发送完信号后经过8 ms的延迟,打开接收通道的开关,开始接收回波信号。由于回波比较微弱,所以先将信号进行放大,将其放大为单片机能够识别的信号。经A/D转换后进行存储,之后进行相关的信号分析与处理工作,从而实现相控阵扫描。
2 超声相控阵的介绍
超声相控阵换能器由多个相互独立的压电晶片组成阵列,按照一定的规则和时序用电子系统控制激发各个晶片单元,来调整焦点的位置和聚焦的方向。相控阵换能器最显著的特点是可以灵活、便捷而有效地控制声束形状和声压分布。其声束角度、焦柱位置、焦点尺寸及位置在一定范围内连续、动态可调。无需声透镜便可实现声束聚焦,从而可以灵活有效地控制声束,实现区域扫描探测;相控阵技术能够实现理想的声束聚焦;采用同样幅度的电压驱动每个阵元,聚焦区域的实际声场强度远大于常规的超声波技术;在分辨力、信噪比、障碍检出率等方面有明显的优越性。[page]

3 超声相控阵的相位延时及发射
相位延时是超声相控阵技术的核心。为了实现超声相控阵的聚焦、偏转等功能,各个阵元应按照不同的相位来发射信号。现有的技术能将相位延时精度做到5ns以内。考虑到导盲对聚焦精度的要求不是太高,本设计采用STM32的定时器实现延时,也能够满足设计要求的精度。另一方面STM32芯片的价格也比较低,适于本项目对低成本产品的定位需求。
本设计采用的是TCF40-18TR1型传感器。这是一款压电陶瓷式收发同体超声波传感器。其中心频率为40 kHz,发射声压在10 V。设计中采用软件的方法产生频率为40 kHz超声信号。STM32F103RBT6包含1个高级定时器和3个通用定时器。通用定时器时钟可由下列时钟源提供:内部时钟、外部时钟、内部触发输入。此处采用APB1外设时钟,频率为36 MHz。可编程通用定时器的主要部分是一个16位计数器和与其相关的自动装载寄存器。通用定时器包含4个独立通道,每个通道都可用于输入捕获、输出比较、PWM和单脉冲输出模式。这里分别将通用定时器TIM2和TIM3的4个独立通道设置成输出比较模式,以产生40 kHz的方波信号。信号经GPIO口输出到超声波换能器放大,再由超声波传感器的探头发出。
4 回波信号的接收部分
超声信号经反射回到探头位置,探头接收到的回波信号一般在毫伏量级。先经过两级的比例放大将信号幅度放大到几百毫伏。比例放大采用的是美国TexasInstruments公司的OPA2725运算放大器,OPA2725具有两个通道,支持单电源供电,轨到轨输出,具有20 MHz的增益带宽。本设计中比例放大由两级运放组成。将收到的回波信号加到同相端和地之间,在反相输入端引入电压负反馈。
信号经比例放大后幅度增大至几百毫伏,此时的信号已经夹杂一定的高频噪声,由于回波信号中的有用信号都集中在40 kHz左右这一频段,所以选用低通滤波电路滤除高频干扰信号。为了得到完整的障碍物信息,低通滤波电路的截止频率即为超声波信号的频率的5倍即200 kHz。低通滤波后的信号再经过一级时间增益(TGC)放大之后进行A/D转换,并存入单片机的存储器中,以进行相关的信号分析。
5 回波信号处理与分析
对应不同的障碍物和地形,系统收到回波的波形和时间都会有区别。根据这2个条件可以实现对障碍物和地形的判断。这里用到1个由N个探头组成的线阵。探头分别编号为1,2,…,N-1,N。当遇到如图3所示障碍物时,相控阵在中间的焦点碰到障碍物接收到的回波,应该是N路声波在焦点处的叠加;而在左右两边聚焦点处由于没有碰到障碍物,所以不会有叠加后的波形返回。以上2种情况收到的波形分别如图4和图5所示。如果碰到沟壑类的障碍物时,如图6所示,这里假设编号N-1探头接收回波信号,当人走到a处时,相控阵聚焦在c点,此时焦点到探头N-1的距离为l,则超声波从探头N-1发射到聚焦点返回探头的时间为t=2l/c,c为空气中超声波的速度。当人走到b点时,相控阵聚焦在d点,这时在d处不会有聚焦后的波形返回,只能是各路超声波在沟壑底面发生反射。仍以编号N-1探头为例,从发射到接收到回波的时间应为t’=![]() ,△l为聚焦点到到沟壑的长度。从上面的分析可以看出,当相控阵的位置从a移动到b,系统收到的回波波形以及接收到波形的时间均发生了明显变化,从而为判断地形提供了可靠依据。
,△l为聚焦点到到沟壑的长度。从上面的分析可以看出,当相控阵的位置从a移动到b,系统收到的回波波形以及接收到波形的时间均发生了明显变化,从而为判断地形提供了可靠依据。

[page]


6 结语
本文介绍了一种基于STM32的超声相控阵导盲系统,主要涉及到系统的硬件设计部分以及超声相控阵识别几种障碍的方法。对于不同的障碍物和地形环境能够得到不同的回波信号,对不同的回波信号进行分析,能够得出不同的漳碍物的特征,从而对障碍做出正确的判断。现阶段国内很多盲人仍然以拐杖提供的触觉感知作为行动的参考,如能在拐杖上面安装本文所介绍的这样一部超声相控阵的导盲装置,必然能给盲人的行动带来极大的方便。
上一篇:基于STM32的全彩LED显示屏系统的设计
下一篇:STM32中采用DMA实现方波的产生和捕获
推荐阅读最新更新时间:2024-03-16 13:04

 ARM Cortex-M0权威指南(中文)
ARM Cortex-M0权威指南(中文)
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号