软件的可靠性一直是一个关键问题。任何使用软件的人都可能会经历计算机死机或程序跑飞的问题,这种情况在嵌入式系统中也同样存在。由于单片机的抗干扰能力有限,在工业现场的仪器仪表中,常会由于电压不稳、电弧干扰等造成死机。在水表、电表等无人看守的情况下,也会因系统遭受干扰而无法重启。为了保证系统在干扰后能自动恢复正常,看门狗定时器(Watchdog Timer)的利用是很有价值的。
1 看门狗的作用
看门狗定时器是一个计数器,基本功能是在发生软件问题和程序跑飞后使系统重新启动。看门狗计数器正常工作时自动计数,程序流程定期将其复位清零,如果系统在某处卡死或跑飞,该定时器将溢出,并将进入中断。在定时器中断中执行一些复位操作,使系统恢复正常的工作状态,即在程序没有正常运行期间,如期复位看门狗以保证所选择的定时溢出归零,使处理器重新启动。
2 看门狗问题及相关实验
现今市面上流行的一些单片机,多嵌有内部WDT,如TI的MSP430系列,Philips的P87XXX和P89XXX系列,Microchip的PIC列,Atmel的AT89SXX系列和Holtek公司的Htxxx系列。但是这些内部看门狗在工作时,多存在一定的误差。一些工程师在设计的过程中,由于忽略了这一点,导致系统出现异常。MSP430系列单片机是美国德州仪器公司(TI)近几年开发的新一代单片机,该系列是一款16位、具有精简指令集、超低功耗的全新概念混合型单片机。在众多单片机系列中,由于它具有极低的功耗、丰富的片内外设和方便灵活的开发手段,已成为一颗耀眼的新星。其内部自带看门狗及复位电路,理论上如果程序跑飞,可用看门狗将其复位。但在实际使用过程中,发现看门狗的作用并非万无一失,以下实验证明了这一点。
实验电路如图1所示。

实验程序清单:
#include
void main(void){
P1DIR l=OxOf; //设置P1.2~P1.O为输出
for(;;){
volatile unsigned int i;
WDTCTL=WDTPW+ WDTCNTCL;
//复位WDT计数器
PIOUT==OxOt; //P1.0~P1.2相互异或
i=5000; //延时
d0(i--);
while(i!=O);
}
}[page]
上述实验启动后,如果程序正常运行,LED会闪烁。缺省时,MSP430的看门狗是允许状态,所运行的程序会不断地访问看门狗。理论上,这个系统是不会发生启动失败的,因为即使启动失败,看门狗也应该在数百毫秒内启动,复位整个系统。基于这种思想,对单片机的复位进行测试。K2断开,用K1连续产生。Reset信号,测试看门狗使系统重启的成功率。K2闭合,则reset端高电平,理论上K1不能有效产生复位脉冲,观察看门狗是否起作用。
3 实验结果与分析
实验结果如下:K2断开,连续开关K1,上电重启系统,平均155次失败1次(LED不闪),即看门狗失效概率0.6%;K2闭合,连续开关K1,平均18次失败1次(LED不闪),且一旦失败,将连续失败下去,看门狗无效率占到了约5.5%。
另外,当采用同样具有内置看门狗的其他系列单片机替代实验中的MSP430,启动程序段作相应修改时,实验结果仍大致相同,这说明具有内置看门狗的单片机面临的问题是相同的。经分析可能有如下原因:
①由于看门狗的时钟不独立,计数时钟与系统为同一分频链路,因此看门狗不能在系统出现问题时有效运作。
②由于时钟可用软件设置,启动失败时,开机时钟可能处于空档,没有时钟看门狗不能生效。
③有些看门狗需要用软件设置或启动,因此启动失败后,初始化程序没有激活,CPU可能跳转到随机代码,使看门狗被禁止。这样的看门狗是需要有可靠的上电复位作保证的,因此,从理论上讲,原设计存在着不合理性。基于上述分析,采用片外看门狗专用芯片TPS3823由独立的分频振荡电路提供计数脉冲。实验电路如图2所示。
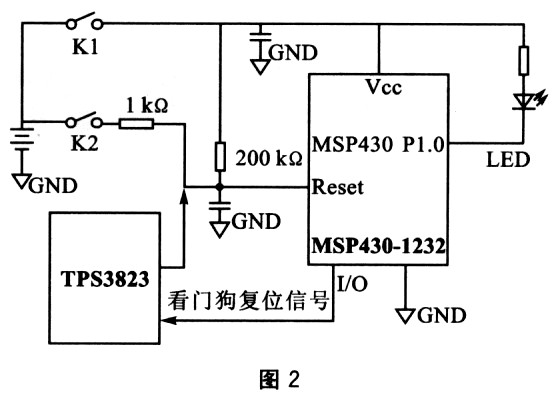
上述电路中,TPS3823输出定时溢出信号给Reset端。程序段中,CPU要不断地通过I/O口输出喂狗信号,使看门狗计数器清零。在此电路中重复上述试验中K1、K2的相同动作,系统重启成功率达到100%。
结 语
未来的内置看门狗必须有独立可靠的时钟。系统上电后,看门狗即为允许状态,无需软件设置,它只能被外部硬件跳线或内部熔丝(fuse)所禁止。目前,如果要求设计可靠性较高的嵌入式系统,外置看门狗是必须考虑的。内置看门狗的另一问题是系统复位后,程序应判断是由Reset端正常上电复位,还是程序跑飞看门狗所致,由此确定现场数据是否应该保留。这也是在看门狗应用中所应考虑的。
关键字:MSP430 单片机 WDT
引用地址:
MSP430单片机中的WDT研究
推荐阅读最新更新时间:2024-03-16 13:21
MSP430 串口初始化,及串口操作
#include msp430x14x.h /* 关于UART0串口的配置,及操作函数说明 */ /* 一、uart0初始化*/ void uart0_idev_init(void) { P3SEL |= BIT4 + BIT5; // 1. 选择P3.4和P3.5做UART0通信端口 ME1 |= UTXE0 + URXE0; // 2. 使能USART0的发送和接受 UCTL0 |= CHAR; // 3. 选择8位字符 UTCTL0 |= SSEL0; // 4. 选择时钟源, ACLK :SSEL0 //
[单片机]
单片机液晶显示程序
单片机液晶显示程序 硬件电路:51最小系统,没有采用总线方式,直接的I/O形式,包括矩阵键盘,1602液晶,一个数码管,LED4个,蜂鸣器等. //单片机液晶秒表计算器完整修改版本 可以实现两种功能的切换,其他功能自行对照代码研究。4*4矩阵键盘,第一排前三列是实现小时分钟秒的加.第二排前三列是实现小时分钟秒的减.当然还可以通过设置矩阵键盘的键值,来实现加减乘除四则运算,由数码管显示参与运算的数字以及最终的运算结果 #include reg51.h #include stdio.h #include stdlib.h #include intrins.h #include absacc.h #d
[单片机]
FFT算法在单片机中的使用&&LCD12864驱动
本次创新基金我是要做一个简易的频谱仪,核心就是要进行一个FFT运算。大家知道,如果采用DSP芯片效果那是相当好的。但由于项目资金以及时间不够等情况,我采用的是ATMEL公司的AVR单片机,这款单片机的FLASH存储和内存比51单片机犀利得多。 由于采用的是12864液晶,也就是一个横128点竖64点的一个点阵,因而采用128点FFT运算已然够了,因为即使得到再多的数据也无法在液晶上可视化显示出来。本文是基于128点FFT运算。 程序如下: #include iom16v.h #include macros.h #include math.h #define N 128 #define PI 3.141592653589 #de
[单片机]
单片机 液体点滴控制
//==============================200700821=================// //====================从机滴速测量========================// #include reg52.h //====================数据类型定义========================// #define Uchar unsigned char #define Uint unsigned int //====================常量定义============================// Uchar t; Uchar p; U
[单片机]
M8单片机串口通讯监听(使用PROTEUS串口仿真GSM模块AT指令通讯)
实现监听(使用PROTEUS串口例子)V1.0 M8单片机仿真原理图如下 单片机源程序如下: //////////////////////////////////////////////////////////////////////////////// // ICC-AVR application builder : 6-25 下午 06:02:39 // Target : M8 // Crystal: 3.6864Mhz // Author: Anwarye // Title: Detcetaphone ///////////////////////////////////////////////////////////
[单片机]

AVR单片机的优越性
什么是AVR单片机?AVR单片机有什么优点?为什么要选择AVR单片机? AVR单片机是ATMEL公司研制开发的一种新型单片机,它与51单片机、PIC单片机相比具有一系列的优点: 1:在相同的系统时钟下AVR运行速度最快; 2: 芯片内部的Flsah、EEPROM、SRAM容量较大; 3:所有型号的Flash、EEPROM都可以反复烧写、全部支持在线编程烧写(ISP); 4:多种频率的内部RC振荡器、上电自动复位、看门狗、启动延时等功能,零外围电路也可以工作; 5:每个IO口都可以以推换驱动的方式输出高、低电平,驱动能力强; 6:内部资源丰富,一般都集成AD、DA模数器;PWM;SPI、USART、TWI、I2C通信口;丰富的中断源
[单片机]
意法半导体推出STM32数控电源微控制器
让云端应用设计变得更节能环保,STM32F334集成高分辨率定时器等先进功能,为数字功率转换应用带来高能效。
中国,2014年8月6日 ——横跨多重电子应用领域、全球领先的半导体供应商意法半导体(STMicroelectronics,简称ST;纽约证券交易所代码:STM)推出最新的数控电源微控制器(STM32F334),为推动数字经济增长的云计算技术进一步提高能效。
今天的数字基础设施耗电量巨大。在全球大约286,000千兆瓦时(GWh) 的年用电量中,仅数字中心一种产业就占据约1.3%。根据Uptime Institute机构的能源利用率(PUE, Power Usage Effective
[电源管理]
8051单片机供水系统水位控制的硬件电路设计
供水系统水位控制原理 下图是水塔水位控制原理图。图中虚线表示允许水位变化的上下限。在正常情况下,应保持水位在虚线范围之内,为此,在水塔的不同高度安装固定不动的三根金属棒,以感知水位变化情况。其中A棒处于下限水位以下,C棒处于上限水位,B棒在下限水位处。A棒接+5V电源,B棒、C棒各通过一个电阻与模拟地相连。 水塔由电机带动水泵供水,单片机控制电机转动以达到对水位控制的目的。供水时,水位上升,当达到上限时,由于水的导电作用,B棒、C棒连通+5V电源,因此,b、c两端均为高电平“1”状态。这时,应停止电机和水泵的工作,不再给水塔供水。 当水位降到下限时,B棒、C棒都不能与A棒导通,因此,b、c两端均为“0”状态。这时,应启动电机,
[单片机]

 单片机创新实践应用.
单片机创新实践应用. 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术












 京公网安备 11010802033920号
京公网安备 11010802033920号