本文将介绍一种应用于寻迹小车的分布式控制系统的设计方法,该系统可对电机模块、传感器模块和灯控模块进行分布式控制。这样设计是为该系统将来从寻迹小车到真车进行移植提供方便。
此寻迹小车模型采用7.5V电池驱动,通过改变PWM占空比调速。小车可以在不完全确定的道路环境下,通过自我判断,对周围环境进行探测,并做出相应的反应(如左拐弯、右拐弯和改变速度等)。目前用在机器人上的多为价格较贵的超声波传感器和红外传感器等,本设计采用价格便宜的反射式光耦传感器来完成对周围环境的感知。此外,小车还具有良好的导航系统。
系统结构
本系统采用分布式结构,如图1所示。因为在车身控制系统中控制对象多而且分散,若采用点对点的集中控制方式,控制模块与被控对象之间就需要大量连接电缆,会导致车内布线复杂且制造和安装困难,并存在故障隐患。分布式系统结构可以根据控制对象的位置来设计控制模块,从而缩短了控制对象与控制模块之间的距离。各模块间通过LIN总线来通信,该方式仅需要一根线作为通信线。此外,分布式系统结构还可降低单板的静态电流,增加单板的稳定性。
根据系统功能要求和结构特点,本控制系统被分成主控模块和三个子模块(传感器模块、电机控制模块和灯控模块)。其中主控模块主要检测车身主体部分控制开关的状态,并根据这些控制开关的状态实现相应的控制策略,然后将控制命令通过CAN总线和LIN总线发送给相应的子模块,之后根据各子模块反馈的负载状态判断是否存在故障,若有故障则报警显示。同时,CAN总线接收上层CAN网络的某些信息。主控制模块的微控制器采用了可靠性高、抗干扰能力强的汽车专用芯片XC164CS,其内部集成了CAN的控制器。图2是主控制模块的硬件原理图。
电机控制模块中的微控制器采用的也是XC164CS,这是由于该系列微控制器中都有相应的单元可以实现对电机的控制,相当方便。本设计使用了两路电机控制小车的后轮驱动和前轮转向。对直流电机的驱动和控制采用了电机控制接口芯片TLE6209,它的内部集成了一个H型桥式电路,用来驱动电机,实现电机的四象限运行,分别对应正转、正转制动、反转和反转制动。16位微控制器XC164CS通过内部的CAPCOM模块产生一个10kHz的PWM信号给TLE6209,触发H桥电路。
3 传感器模块的设计
传感器模块中采用了微控制器XC866,主要用来采集8个传感器的值,传送给主控制板的XC164CS进行处理,然后产生相应的策略改变PWM占空比对驱动和转向电机做出相应的控制。同时,还要完成对通信模块数据的发送和接收,其硬件框图如图3所示。
系统通信
小车的各个电子控制单元之间通过LIN总线和CAN总线连接。
本系统中CAN收发器采用了TLE6250G,电机信息的传输需要高速的数据传输率(200Kb/s)以达到实时控制电机的要求。CAN的数据发送速率高达1Mb/s,可工作于只接收模式和空闲模式,具有优良的EMC特性和各种保护功能;而LIN总线因为数据传输率较低以及从确保高安全性能的角度来考虑并不合适。
使用CAN、LIN结合的网络结构可以兼顾CAN总线实时性强、可靠性高、通信速率快、互操作性好、灵活性高和LIN网络结构简单、成本低的特点,更好地搭建汽车的网络系统。
本系统采用了TLE6258系列LIN总线收发器,它作为介于协议控制器和物理总线之间的接口,特别适合在汽车和工业应用的LIN系统中用来驱动总线,且可用于标准的ISO9141系统。TLE6258提供空闲模式以减少电流损耗,通过在总线上发送唤醒帧,可把主机或从机从空闲模式唤醒,返回到正常的操作模式。图4是本系统的LIN总线硬件电路图。
软件设计
系统中各个ECU通过CAN总线发送接收命令,实现相互通信,从而实现数据的共享等。软件设计基于DAVE和KEIL软件编写,程序主要由CAN初始化、发送数据和接收数据三部分组成,如图5所示。
本设计方案可实现分布式车身控制系统的基本功能,且结构简单、成本低。此外,这一设计思想同样也适用于真车的控制。汽车电子技术的不断进步,将促使CAN、LIN和正在发展的更高速、具有容错性的总线技术有机组合,构成安全、舒适,更满足人们需求的汽车网络。(end)
关键字:寻迹小车中 分布式控制系统 XC164CS
引用地址:一种寻迹小车中分布式控制系统的设计与应用
此寻迹小车模型采用7.5V电池驱动,通过改变PWM占空比调速。小车可以在不完全确定的道路环境下,通过自我判断,对周围环境进行探测,并做出相应的反应(如左拐弯、右拐弯和改变速度等)。目前用在机器人上的多为价格较贵的超声波传感器和红外传感器等,本设计采用价格便宜的反射式光耦传感器来完成对周围环境的感知。此外,小车还具有良好的导航系统。
系统结构
本系统采用分布式结构,如图1所示。因为在车身控制系统中控制对象多而且分散,若采用点对点的集中控制方式,控制模块与被控对象之间就需要大量连接电缆,会导致车内布线复杂且制造和安装困难,并存在故障隐患。分布式系统结构可以根据控制对象的位置来设计控制模块,从而缩短了控制对象与控制模块之间的距离。各模块间通过LIN总线来通信,该方式仅需要一根线作为通信线。此外,分布式系统结构还可降低单板的静态电流,增加单板的稳定性。
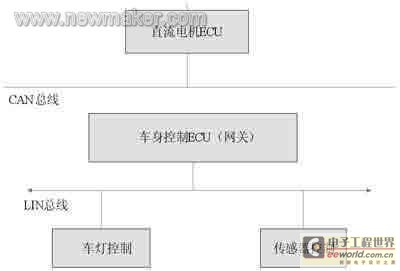
图1 分布式车身控制系统结构图
根据系统功能要求和结构特点,本控制系统被分成主控模块和三个子模块(传感器模块、电机控制模块和灯控模块)。其中主控模块主要检测车身主体部分控制开关的状态,并根据这些控制开关的状态实现相应的控制策略,然后将控制命令通过CAN总线和LIN总线发送给相应的子模块,之后根据各子模块反馈的负载状态判断是否存在故障,若有故障则报警显示。同时,CAN总线接收上层CAN网络的某些信息。主控制模块的微控制器采用了可靠性高、抗干扰能力强的汽车专用芯片XC164CS,其内部集成了CAN的控制器。图2是主控制模块的硬件原理图。

图2 主控制器模块硬件原理图
电机控制模块中的微控制器采用的也是XC164CS,这是由于该系列微控制器中都有相应的单元可以实现对电机的控制,相当方便。本设计使用了两路电机控制小车的后轮驱动和前轮转向。对直流电机的驱动和控制采用了电机控制接口芯片TLE6209,它的内部集成了一个H型桥式电路,用来驱动电机,实现电机的四象限运行,分别对应正转、正转制动、反转和反转制动。16位微控制器XC164CS通过内部的CAPCOM模块产生一个10kHz的PWM信号给TLE6209,触发H桥电路。
3 传感器模块的设计
传感器模块中采用了微控制器XC866,主要用来采集8个传感器的值,传送给主控制板的XC164CS进行处理,然后产生相应的策略改变PWM占空比对驱动和转向电机做出相应的控制。同时,还要完成对通信模块数据的发送和接收,其硬件框图如图3所示。

图3 传感器模块硬件框图
系统通信
小车的各个电子控制单元之间通过LIN总线和CAN总线连接。
本系统中CAN收发器采用了TLE6250G,电机信息的传输需要高速的数据传输率(200Kb/s)以达到实时控制电机的要求。CAN的数据发送速率高达1Mb/s,可工作于只接收模式和空闲模式,具有优良的EMC特性和各种保护功能;而LIN总线因为数据传输率较低以及从确保高安全性能的角度来考虑并不合适。
使用CAN、LIN结合的网络结构可以兼顾CAN总线实时性强、可靠性高、通信速率快、互操作性好、灵活性高和LIN网络结构简单、成本低的特点,更好地搭建汽车的网络系统。
本系统采用了TLE6258系列LIN总线收发器,它作为介于协议控制器和物理总线之间的接口,特别适合在汽车和工业应用的LIN系统中用来驱动总线,且可用于标准的ISO9141系统。TLE6258提供空闲模式以减少电流损耗,通过在总线上发送唤醒帧,可把主机或从机从空闲模式唤醒,返回到正常的操作模式。图4是本系统的LIN总线硬件电路图。

图4 串行通信/LIN总线硬件电路
软件设计
系统中各个ECU通过CAN总线发送接收命令,实现相互通信,从而实现数据的共享等。软件设计基于DAVE和KEIL软件编写,程序主要由CAN初始化、发送数据和接收数据三部分组成,如图5所示。

图5 主程序流程图
本设计方案可实现分布式车身控制系统的基本功能,且结构简单、成本低。此外,这一设计思想同样也适用于真车的控制。汽车电子技术的不断进步,将促使CAN、LIN和正在发展的更高速、具有容错性的总线技术有机组合,构成安全、舒适,更满足人们需求的汽车网络。(end)
上一篇:基于CAN通信的卡车语音报警器的设计
下一篇:基于串行通信的车载信息采集系统的设计
推荐阅读最新更新时间:2024-03-16 13:32
分布式智能火灾报警控制系统设计
摘 要: 给出了一种分布式智能火灾报警控制系统的设计方法、系统软硬件的组成和实现。系统设计中采用多CPU的并行处理方式和智能数据处理方法,实现了系统的实时、准确报警和可靠的联动控制,利用现场总线CAN实现控制器的联网。实践表明,系统可靠性高、灵活性强、人机界面友好。
关键词:智能 火灾报警 微控制器网络CAN总线
智能型火灾报警控制系统是一个集信号检测、传输、处理和控制于一体的控制系统,代表了当今火灾报警系统的发展方向。随着科学技术的迅猛发展以及国内外经济的迅速增长,市场上迫切需要一种容量大、性能优越、可靠性高、便于安装、使用和维修的智能型火灾报警控制系统。
本文给出了
[应用]
寻迹小车中分布式控制系统的设计
本文将介绍一种应用于寻迹小车的分布式控制系统的设计方法,该系统可对电机模块、传感器模块和灯控模块进行分布式控制。这样设计是为该系统将来从寻迹小车到真车进行移植提供方便。
此寻迹小车模型采用7.5V电池驱动,通过改变PWM占空比调速。小车可以在不完全确定的道路环境下,通过自我判断,对周围环境进行探测,并做出相应的反应(如左拐弯、右拐弯和改变速度等)。目前用在机器人上的多为价格较贵的超声波传感器和红外传感器等,本设计采用价格便宜的反射式光耦传感器来完成对周围环境的感知。此外,小车还具有良好的导航系统。
系统结构
本系统采用分布式结构,如图1所示。因为在车身控制系统中控制对象多而且分散,若采用点对点的集中控制方式,控制模块与
[应用]
基于SERCOS总线的机器人分布式控制系统
随着我国经济的持续增长和科技的进步,机器人技术得到了迅速发展。从一般的工业生产,如装配、焊接,到特殊的应用领域,如医疗、太空等,机器人在现代社会的各个方面得到了广泛的应用。目前对机器人的性能要求越来越高,不仅要具有快速的响应特性,较高的跟踪精度,而且应该有良好的通用性和扩展性,为此,对机器人控制系统提出了越来越高的要求。 SERCOS(Serial Real-time Communication System)总线是一种开放式的运动控制总线,其接口协议已经成为用于开放式运动控制的国际标准。这种总线具有完全开放的通讯结构、严格的同步机制和极佳的抗干扰能力,在恶劣的环境下能够可靠的实现对多轴运动的实时同步控制,适应了机器人技术的发展。
[嵌入式]
 新能源接入智能电网的逆变控制关系技术
新能源接入智能电网的逆变控制关系技术 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章







更多热门文章
更多每日新闻
更多往期活动
- 我与BeagleBone 有个约会!
- 【评论有礼!】Sleepace RestOn 智能睡眠监测仪拆解
- ST直播主题:高度灵活的、易用的、可定制化的协议栈--BlueNRG-LP 协议栈介绍
- 《瑞萨电子低功耗MCU实战手册》来了,快去下载赢取好礼!
- 您的无人机安全吗?使用电路保护应对安全隐患
- 【EEWORLD第三十六届】2012年03月社区明星人物揭晓!
- 下载赢礼 | 雅特生 PMBus 接口非隔离数字 DC-DC 转换器
- 挑战四月 恩智浦MCU开发体验搜集令!
- 有奖直播:使用 NI CompactDAQ 和 LabVIEW构建基于传感器的测试系统
- 【报名赢小米手环、膳魔师保温杯等好礼】罗德与施瓦茨HDMI 1.4b/2.1 接口测试
11月22日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号