本文所设计的系统就是为了满足对各个设备的相关数据进行实时记录与及时分析这样的需求。本系统以S3C2410 为核心,采用linux 实时操作系统,结合嵌入式设备与网络技术的优点, 有可连接设备数量多,速度快,功能多及可扩展性强等优点,可完成大量电力设备的集中监控,显着提高用户自动化系统的可靠性,节约大量的人力物力。
基于S3C2410 的电力设备记录仪采用了功能强大的ARM920T 内核的芯片作为CPU,支持485,CAN,以太网3 种通信方式,采用液晶显示与触摸屏,大容量SD 卡存储单元。
1 系统的总体结构设计
系统的组成部分和主要功能如下:
1)上位机部分,主要负责远程的信息配置与数据采集,记录,与处理。
2)数据记录分析仪部分:主要负责现场的信息配置和数据记录与处理。
3)单片机系统:主要负责环境信息的采集,监控,处理。
2 系统的硬件设计
记录仪的硬件系统由核心板与主板2 部分构成。其中核心板主要负责CPU 与RAM 存储器,Flash 存储器等的搭建。
主板包括整个系统的电源部分, 以太网通信部分,CAN 通信部分,485 通信部分,串行通信部分,显示部分,数据存储部分,CPLD 部分等。核心板与主板通过双排插针的结构连接。
硬件设计的的结构图如图1 所示。

图1 记录仪结构图
2.1 核心板的设计
核心板主要由CPU S3C2410、内存SDRAM、闪存NANDFlash、晶振电路、启动配置电路等几部分构成。
CPU S3C2410A 的内部仅仅集成了4 k 大小的SRAM,用作系统程序的引导程序空间, 所以需要扩展一定容量的RAM,用来用作主程序的运行空间,数据及堆栈区。当系统启动时,CPU 首先从复位地址0x0 处读启动代码, 完成系统初始化后,程序代码一般都调入SDRAM 中运行,以提高系统的运行速度, 同时, 系统及用户堆栈, 运行数据也都放在SDRAM 中。SRAM 中的引导程序完成以后,会将操作系统镜像加载到SDRAM 中。本系统的SDRAM 由2 片HY57V561620T 构建成1 个32 位的SDRAM 存储结构。
HY57V561620T 是1 个268 435 456 位的CMOS SDRAM 芯片,能够很好地满足大容量高宽度的存储需求。
本系统中使用的Flash 为三星公司的K9F1208., 容量为64 MB, 采用块页式存储管理,8 个I/O 引脚充当数据,地址,命令的复用端口。
2.2 主板的设计
如上所述,主板负责整个系统的电源部分,以太网通信部分,CAN 通信部分,485 通信部分,串行通信部分,显示部分,数据存储部分,CPLD 部分等。
2.2.1 电源模块的设计
CPUS3C2410A 芯片的各个模块采取独立供电, 其中,内核在200 MHz 工作时, 工作电压是1.8 V, 在266 MHz 工作时,工作电压是2 V,存储器和I/O 的工作电压是3.3 V,所以本系统采用一个+5 V 的开关电源模块, 然后再分别将+5 V电压处理成3.3 V 电压和1.8 V 电压。其中3.3 V 电压是用低压差线性电压源通过+5 V 调整得到的。直流5 V 电压经外部接入,经过电源的滤波,输出平稳的,5 V 可用的电压,通过LM1117T 的调整可以得到可用的3.3 V 电压。最后在输出端接入一个100 μF 的钽电容, 来改善其瞬态响应和稳定性。
原理图如图2 所示。

图2 3.3 V 电压的实现
系统中的1.8 V, 是用线性电压调节器MIC5207 根据3.3 V转换而成的,其原理图如图3 所示。输出电压用于向CPU 的内核供电。在上图中,MIC5207 的3 脚接到CPU 的PWREN管脚, 通过PWREN 给MIC5207 一个电平, 可以控制MIC5207 的开关,从而可以将CPU 内核的电源关闭,使其进入掉电状态。MIC5207 的4 脚接入1 个470 pF 的旁路电容,其作用在于进一步降低噪音。其输出接入1 个470 pF 的滤波电容,进一步使输出更加平稳。
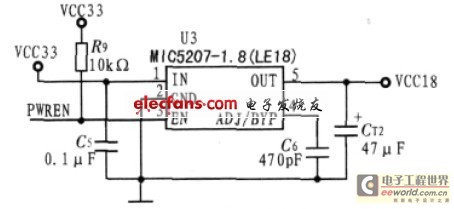
图3 1.8 V 电压的实现
2.2.2 通信模块的设计
本系统作为一个多功能的数据记录显示仪器, 提供485通信与CAN 通信与下位机采样模块连接。485 通信与CAN通信是工业现场比较常用的2 种模块。另外,系统还配置了以太网通信模块,便于将数据传送到上位机进行集中监控和管理。下面,就分别进行简单说明。
1) 485 通信模块的设计
485 通信模块原理图如图4 所示。

图4 485 通信模块原理图
常规的485 通信模块由电源隔离, 光耦电气隔离,RS-485 总线收发器与保护器构成。由于地回路的存在,通信回路与地之间存在电势差,在环境恶劣的场合尤为突出。电势差会在通信线之间形成共模电压。由于通信线之间对地阻抗不平衡,共模电压就会在通信线之间产生干扰电压,使通信的可靠性降低,严重情况下还会毁坏通信节点。电源隔离和光耦隔离的作用在于防止此情况发生,但是加入太多的隔离模块会使电路复杂化。在本系统中,采用集成的隔离485 收发器模块RSM485CHT,它集成了电源隔离,光耦电气隔离,总线收发器与总线保护器。这样降低了系统的复杂程度,又能有效地提高电路的抗干扰能力,传输速度和可靠性。还有效地减小了PCB 板的面积以及布线的复杂程度。
由于RSM485CHT 芯片的TXD,RXD,CON 的接口匹配电平是+5 V 电平,而CPU 的管脚电平是3.3 V,所以需要接入1 个总线电平转化器74LV4245A, 用来给3 V 器件和5 V器件提供接口。也可以选择与3.3 V 电平匹配的隔离模块RSM3485CHT。2)CAN 通信模块的设计
[page]
CAN 总线由BOSCH 公司开发,最先应用于汽车工业,为解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。它是一种多主方式的串行通信总线,有高的位速率,高的抗电磁干扰性,成本低,传输效率高,传输效率远,有可靠的错误处理和检错机制。因为CAN 总线有很好的实时性能,所以在汽车工业,航空工业,工业控制,安全防护能领域得到了广泛的应用。
CAN 总线发明以来,出现了许许多多的CAN 控制芯片,它们各有优势。本文所采用的控制芯片,是PHILIPS 公司的SJA1000T。SJA1000 是一种独立控制器,它增加了一种新的模式,可以支持CAN2.0B 协议。它是82C200 的替代品,相比于后者,它各方面的性能都有很大的提高,标识符由原来的11位扩展到29 位, 滤波方式由原来的单一方式改为单滤波和双滤波2 种方式,并且在出错处理,超载能力,以及接受滤波等方面有了很大的改进。
与485 通信模块相同,CAN 通信模块的设计仍然采用隔离模块CTM1050。CTM1050 作为物理总线与CAN 控制器之间的接口, 用于提高总线的差动发送能力与CAN 总线的差动接受能力。CTM1050 则采用了全灌封工艺, 内部集成了CAN 总线所必需的所有收发电路,完全电器隔离电路,隔离电压。很好地实现了系统的模块化设计,简化了电路的连接与维护。CAN 总线模块的原理图如图5 所示。

图5 CAN 通信模块原理图
如上图所示,CAN 总线通信模块由CAN 控制器SJA1000T 与集成收发控制器CTM1050 构成。CAN 收发器连接到CAN 总线, 负责控制从CAN 控制器到总线物理层或相反的逻辑电平信号,CAN 收发器的上一层是CAN 控制器,负责执行CAN 规范的中完整的协议, 通常用于报文缓冲和验收滤波。CAN 控制器的上一层是CPU。
SJA1000 支持2 种CPU 类型:80C51 和68**, 这一功能是通过配置MODE 引脚实现的,在本系统中,采用80C51 的INTEL 模式,另外,采用独立的外接晶振,来改善CAN 节点的EMC 性能。
3)以太网通信模块的设计
监控器中的以太网接口设计是为了通过组态软件与上位机通信,从而提高整个系统的自动化程度,增加可操作性。
以太网接口控制器主要包括MAC 和PHY 2 部分, 其中MAC 层控制作为逻辑控制比较容易承载处理器内部。没有集成MAC 控制器的嵌入式处理器, 更通用的方法是采用集成了MAC 控制器与PHY 的以太网控制器,本系统就是采取这种方法,以Host Bus 接口的控制器有很多,本系统采用的是Cirrus Logic 公司的CS8900[5]。
CS8900A 是一个真正的单片, 全双工的以太网控制器,它把所有需要的模拟电路和数字电路集成为一个完整的以太网电路,有以下几个模块组成:直接的ISA-bus 接口、接口缓冲内存、串行的EEPROM 接口、带有10ASE-T 端口和AUI端口的完整的模拟滤波器。
CS8900 可以设置为测试模式和休眠模式, 低电平有效,正常模式下把nTEXT 和nSLEEP 位置高位。CS8900A-CQ3是一个3.3 V 电平的芯片。,可以与S3C2410 直接连通。在本系统中, 在地址总线和CPU 之间与数据总线与CPU 之间都接入一个三态门,这样可以对总线进行有效的控制。另外,用CPLD 模块代替了普通常用的与非门电路,节省了CPU 的管脚,同时减小了电路板的体积。电路原理图如图6 所示。

图6 以太网模块原理图
系统的显示模块采用800×600 的液晶屏, 电阻式触摸屏,结构比较简单,由于篇幅所限在此不再赘述。
3 结论
本设计能将分散在各个工作现场的设备数据集中起来,能自己完成数据的集中显示,分析,对各单元设备的操作控制,还可以作为数据传输的中间站,将数据传输于上位机进行集中的检测与控制。在工业现场的网络中,能起到很关键的作用。另外,该系统通用性强,搭配不同的软件定义,可以应用于许多场合。
上一篇:一种32位MCU开发板的设计与实现
下一篇:基于嵌入式系统的多媒体音乐播放器
推荐阅读最新更新时间:2024-03-16 13:44

 软硬件融合 (黄朝波 著)
软硬件融合 (黄朝波 著) 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号