主机:Gentoo Linux 11.2 with linux kernel 3.0.6
2、mtd_part结构体信息
3、mtd_partition描述mtd具体分区结构
关键字:ARM-Linux驱动 MTD 驱动分析
引用地址:ARM-Linux驱动--MTD驱动分析(一)
硬件平台:FL2440(S3C2440)with linux kernel 2.6.35
MTD(memory technology device内存技术设备) 在硬件和文件系统层之间的提供了一个抽象的接口,MTD是用来访问内存设备(如:ROM、flash)的中间层,它将内存设备的共有特性抽取出来,从而使增加新的内存设备驱动程序变得更简单。MTD的源代码都在/drivers/mtd目录中。
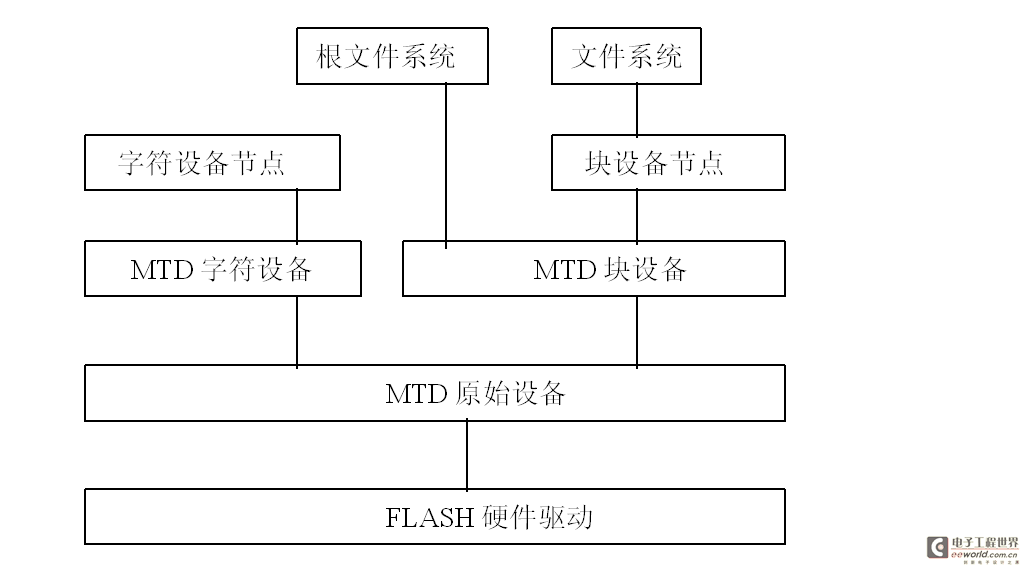
MTD中间层细分为四层,按从上到下依次为:设备节点、MTD设备层、MTD原始设备层和硬件驱动层。MTD中间层层次结构图如下:

从上图可以看出,原始设备是MTD字符设备和MTD块设备的抽象。
MTD设备层、MTD原始设备层和Flash硬件驱动层之间的接口关系如下图:

下面首先分析下MTD原始层设备
1、mtd_info数据结构
- struct mtd_info {
- u_char type;//内存技术类型,例如MTD_RAM,MTD_ROM,MTD_NORFLASH,MTD_NAND_FLASH,MTD_PEROM等
- uint32_t flags;//标志位
- uint64_t size; // Total size of the MTD//MTD设备的大小
- /* "Major" erase size for the device. Naïve users may take this
- * to be the only erase size available, or may use the more detailed
- * information below if they desire
- */
- uint32_t erasesize;//最小的擦除块大小
- /* Minimal writable flash unit size. In case of NOR flash it is 1 (even
- * though individual bits can be cleared), in case of NAND flash it is
- * one NAND page (or half, or one-fourths of it), in case of ECC-ed NOR
- * it is of ECC block size, etc. It is illegal to have writesize = 0.
- * Any driver registering a struct mtd_info must ensure a writesize of
- * 1 or larger.
- */
- uint32_t writesize;//编程块大小
- uint32_t oobsize; // Amount of OOB data per block (e.g. 16)//oob(Out of band)块大小
- uint32_t oobavail; // Available OOB bytes per block//每块的可用的oob字节
- /*
- * If erasesize is a power of 2 then the shift is stored in
- * erasesize_shift otherwise erasesize_shift is zero. Ditto writesize.
- */
- unsigned int erasesize_shift;
- unsigned int writesize_shift;
- /* Masks based on erasesize_shift and writesize_shift */
- unsigned int erasesize_mask;
- unsigned int writesize_mask;
- // Kernel-only stuff starts here.
- const char *name;
- int index;
- /* ecc layout structure pointer - read only ! */
- struct nand_ecclayout *ecclayout;//eec布局结构
- /* Data for variable erase regions. If numeraseregions is zero,
- * it means that the whole device has erasesize as given above.
- */
- int numeraseregions;//擦除区域个数,通常为1
- struct mtd_erase_region_info *eraseregions;//擦除区域的区域信息地址
- /*
- * Erase is an asynchronous operation. Device drivers are supposed
- * to call instr->callback() whenever the operation completes, even
- * if it completes with a failure.
- * Callers are supposed to pass a callback function and wait for it
- * to be called before writing to the block.
- */
- int (*erase) (struct mtd_info *mtd, struct erase_info *instr);//函数指针,erase函数的功能是将一个erase_info加入擦除队列
- /* This stuff for eXecute-In-Place */
- /* phys is optional and may be set to NULL */
- int (*point) (struct mtd_info *mtd, loff_t from, size_t len,
- size_t *retlen, void **virt, resource_size_t *phys);//point函数功能是允许片内执行(XIP)
- /* We probably shouldn't allow XIP if the unpoint isn't a NULL */
- void (*unpoint) (struct mtd_info *mtd, loff_t from, size_t len);//unpoint函数与point函数相反,是禁止片内执行(XIP)
- /* Allow NOMMU mmap() to directly map the device (if not NULL)
- * - return the address to which the offset maps
- * - return -ENOSYS to indicate refusal to do the mapping
- */
- //如果不是NULL,则允许无MMU单元的地址映射,返回偏移地址
- unsigned long (*get_unmapped_area) (struct mtd_info *mtd,
- unsigned long len,
- unsigned long offset,
- unsigned long flags);
- /* Backing device capabilities for this device
- * - provides mmap capabilities
- */
- struct backing_dev_info *backing_dev_info;
- //MTD设备的读写函数
- int (*read) (struct mtd_info *mtd, loff_t from, size_t len, size_t *retlen, u_char *buf);
- int (*write) (struct mtd_info *mtd, loff_t to, size_t len, size_t *retlen, const u_char *buf);
- /* In blackbox flight recorder like scenarios we want to make successful
- writes in interrupt context. panic_write() is only intended to be
- called when its known the kernel is about to panic and we need the
- write to succeed. Since the kernel is not going to be running for much
- longer, this function can break locks and delay to ensure the write
- succeeds (but not sleep). */
- int (*panic_write) (struct mtd_info *mtd, loff_t to, size_t len, size_t *retlen, const u_char *buf);
- //用于MTD设备的OBB数据读写
- int (*read_oob) (struct mtd_info *mtd, loff_t from,
- struct mtd_oob_ops *ops);
- int (*write_oob) (struct mtd_info *mtd, loff_t to,
- struct mtd_oob_ops *ops);
- /*
- * Methods to access the protection register area, present in some
- * flash devices. The user data is one time programmable but the
- * factory data is read only.
- */
- int (*get_fact_prot_info) (struct mtd_info *mtd, struct otp_info *buf, size_t len);
- int (*read_fact_prot_reg) (struct mtd_info *mtd, loff_t from, size_t len, size_t *retlen, u_char *buf);
- int (*get_user_prot_info) (struct mtd_info *mtd, struct otp_info *buf, size_t len);
- int (*read_user_prot_reg) (struct mtd_info *mtd, loff_t from, size_t len, size_t *retlen, u_char *buf);
- int (*write_user_prot_reg) (struct mtd_info *mtd, loff_t from, size_t len, size_t *retlen, u_char *buf);
- int (*lock_user_prot_reg) (struct mtd_info *mtd, loff_t from, size_t len);
- /* kvec-based read/write methods.
- NB: The 'count' parameter is the number of _vectors_, each of
- which contains an (ofs, len) tuple.
- */
- int (*writev) (struct mtd_info *mtd, const struct kvec *vecs, unsigned long count, loff_t to, size_t *retlen);
- /* Sync */
- //MTD设备的同步函数
- void (*sync) (struct mtd_info *mtd);
- /* Chip-supported device locking */
- //芯片的加锁和解锁
- int (*lock) (struct mtd_info *mtd, loff_t ofs, uint64_t len);
- int (*unlock) (struct mtd_info *mtd, loff_t ofs, uint64_t len);
- /* Power Management functions */
- //支持电源管理函数
- int (*suspend) (struct mtd_info *mtd);
- void (*resume) (struct mtd_info *mtd);
- /* Bad block management functions */
- //坏块管理函数
- int (*block_isbad) (struct mtd_info *mtd, loff_t ofs);
- int (*block_markbad) (struct mtd_info *mtd, loff_t ofs);
- struct notifier_block reboot_notifier; /* default mode before reboot */
- /* ECC status information */
- struct mtd_ecc_stats ecc_stats;//ECC状态信息
- /* Subpage shift (NAND) */
- int subpage_sft;
- void *priv;//私有数据指针
- struct module *owner;
- struct device dev;
- int usecount;//记录用户的个数
- /* If the driver is something smart, like UBI, it may need to maintain
- * its own reference counting. The below functions are only for driver.
- * The driver may register its callbacks. These callbacks are not
- * supposed to be called by MTD users */
- //驱动回调函数
- int (*get_device) (struct mtd_info *mtd);
- void (*put_device) (struct mtd_info *mtd);
- };
2、mtd_part结构体信息
- /* Our partition linked list */
- static LIST_HEAD(mtd_partitions);//分区链表
- /* Our partition node structure */
- //分区结构信息
- struct mtd_part {
- struct mtd_info mtd;//mtd_info数据结构,会被加入mtd_table中
- struct mtd_info *master;//该分区的主分区
- uint64_t offset;//该分区的偏移地址
- struct list_head list;//分区链表
- };
3、mtd_partition描述mtd具体分区结构
- /*
- * Partition definition structure:
- *
- * An array of struct partition is passed along with a MTD object to
- * add_mtd_partitions() to create them.
- *
- * For each partition, these fields are available:
- * name: string that will be used to label the partition's MTD device.
- * size: the partition size; if defined as MTDPART_SIZ_FULL, the partition
- * will extend to the end of the master MTD device.
- * offset: absolute starting position within the master MTD device; if
- * defined as MTDPART_OFS_APPEND, the partition will start where the
- * previous one ended; if MTDPART_OFS_NXTBLK, at the next erase block.
- * mask_flags: contains flags that have to be masked (removed) from the
- * master MTD flag set for the corresponding MTD partition.
- * For example, to force a read-only partition, simply adding
- * MTD_WRITEABLE to the mask_flags will do the trick.
- *
- * Note: writeable partitions require their size and offset be
- * erasesize aligned (e.g. use MTDPART_OFS_NEXTBLK).
- */
- struct mtd_partition {
- char *name; /* identifier string 分区名*/
- uint64_t size; /* partition size 分区大小*/
- uint64_t offset; /* offset within the master MTD space 偏移地址*/
- uint32_t mask_flags; /* master MTD flags to mask out for this partition */
- struct nand_ecclayout *ecclayout; /* out of band layout for this partition (NAND only)*/
- };
上一篇:ARM-Linux驱动--MTD驱动分析(二)
下一篇:ARM-Linux移植攻略--yaffs2 Partially written block xxx detected 问题解决
推荐阅读最新更新时间:2024-03-16 14:51
S3C2440 (4.3寸)LCD驱动程序之层次分析(十六)

在上一节LCD层次分析时,得出写个LCD驱动入口函数,需要以下4步: 1)分配一个fb_info结构体:framebuffer_alloc(); 2)设置fb_info; 3)设置硬件相关的操作; 4)使能LCD,并注册fb_info:register_framebuffer(); 本节需要用到的函数: 函数dma_alloc_writecombine():(分配显存) void * dma_alloc_writecombine(struct device *dev, size_t size, dma_addr_t *handle, gfp_t gfp);//分配DMA缓存区给现存 //返回值为:申请到
[单片机]

Mini2440 DM9000 驱动分析(二)
在真正的开始分析dm9000 driver的probe之前,首先来看看dm9000 驱动中几个十分重要的结构 1、dm9000_driver static struct platform_driver dm9000_driver = { .driver = { .name = dm9000 , .owner = THIS_MODULE, .pm = &dm9000_drv_pm_ops, }, .probe = dm9000_probe, .remove = __devexit_p(dm9000_drv_remove), }; dm9000_driver是platform_driver结构体变量,其中
[单片机]
基于S3c2440的I2C驱动与测试程序追踪交叉分析
VMware虚拟机+Fedora10, 硬件平台TQ2440, 内核2.6.30.4 对应的驱动程序豁然开朗, 然后自己添加了一些dev_dbg后, 对于不理解的地方也有了一定的参考提示, 记录下来与大家分享。 测试程序如下: /*i2c_test.c * hongtao_liu */ #include #include #include #include #include #include #include #include #define I2C_RETRIES 0x0701 #define I2C_ TI MEOUT 0x0702 #define I2C_RDWR 0x0707 /*********定义struct i
[单片机]
1W大功率LED驱动电源电路分析
大功率发光二极管比日光灯具有更高的发光效率和使用寿命。人们应根据实际使用方式另外加装散热器。目前,国产3W发白光的LED零售价为15元,但由于3W大功率LED质量还不够可靠,暂不宜使用。5W大功率LED只有进口货,每只售价高达60元,仅适用于特殊要求的灯光工程之中,最适合人们家里作照明用的就是国产1W发光二极管。 鉴于大功率发光二极管工作电压仅为3V,通过全桥整流将220V交流电变成直流电,在全桥上的电压降约为1.8V,只驱动一只发光二极管工作的电能利用效率仅为60%。必须把3只以上发光二极管串联起来工作,才能使总的电能利用效率超过80%。 根据3基色合成白光原理,将红、绿、蓝3只1W大功率发光二极管串联起来工作
[电源管理]
电驱动关键技术分析 电驱动系统结构及原理
电机驱动低速高扭、扭矩波动小,因此悬置布置时不用追求高的解耦率,重点考虑限位、抗扭作用; 从外特性上对比来看,电机驱动相比内燃机驱动,扭矩响应速度快、峰值扭矩作用区间宽,在特殊路况下容易出现动态冲击事件,产品的耐久、强度需要特殊考虑; 传统车工作转速区间比较集中,而新能源车相对较宽,需要在很宽的转速范围内考虑共振等NVH问题。
[嵌入式]
电动汽车驱动方式优缺点技术分析
电动汽车相对传统汽车具有能量转换效率高、噪声小、零排放等优点,同时由于电动机的带载性和宽调速特性,可去掉离合器和变速箱等机械装置,使结构简化,维护、保养方便。在当今能源、环境双重问题的推动下,世界主要汽车生产国都以前所未有的力度发展电动汽车产业,科研人员对电动汽车的研发也获得了绝佳机遇。因此,电动汽车正在开创汽车产业的新格局,它将成为汽车工业发展的主要方向。 驱动电机作为电动汽车的核心部件,其好坏对电动汽车的动力性、经济性、安全性都有重要影响。但汽车驱动电机有别于其它工业电机,电机驱动系统不仅受汽车结构尺寸的影响,同时还要满足复杂工况下的运行条件。因此,除了要求驱动电机效率高、质量小、功率密度大、尺寸小、可靠性好及成本低的特点
[嵌入式]
MapPtrToProcess 用法 WINCE驱动分析3
以使用下面的应用程序代码测试这个driver,使用evc编译。
#include windows.h
#include Windev.h
#include stdio.h
#include "objbase.h"
#include "initguid.h"
#include "foo.h"
//char data1 ;
int WinMain(void)
{
HANDLE hnd;
COPY_STRUCT cs ;
int i;
//static char data1 ;
auto char data1 ;
auto char
[嵌入式]
Teledyne LeCroy 发布电机驱动分析仪
在8通道、12bit高精度示波器上的针对三相电机驱动的功率分析能力 Chestnut Ridge, NY, February 4, 2015 -力科(Teledyne LeCroy)发布了MDA800系列电机驱动分析仪(MDA),该设备将三相功率分析仪的静态(稳态)计算能力,独特的动态三相电源和电机的机械分析功能与高带宽(1 GHz)的控制系统结合为一台仪器。 电机驱动器分析仪(MDA)搭载于HDO8000示波器平台上。该平台标配8个输入通道(16个数字通道可选),拥有12位垂直分辨率,2.5 GS/ s的实时采样率,高达1 GHz的带宽和高达250 Mpts的单通道采集存储。拥有一整套完整的串行触
[测试测量]
 华中数控系统装调与实训
华中数控系统装调与实训 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月14日历史上的今天
厂商技术中心
随便看看




 京公网安备 11010802033920号
京公网安备 11010802033920号