段式液晶由于其功耗低、价格便宜在很多家电中得到广泛的应用,其驱动其实并不复杂,大多是情况下都是用HT1621B进行驱动。
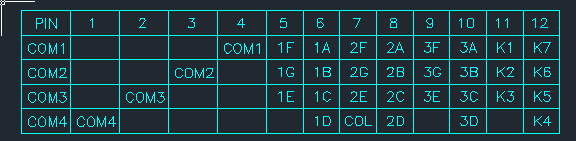
 我们知道HT1621是由4个COM口和18个Seg接口构成,COM口的连接和简单,直接对应连接即可,而Seg可以根据你的PCB布局、连线的方便等进行选择性连接。
我们知道HT1621是由4个COM口和18个Seg接口构成,COM口的连接和简单,直接对应连接即可,而Seg可以根据你的PCB布局、连线的方便等进行选择性连接。
关键字:段式液晶模块 驱动
引用地址:段式液晶模块的驱动
HT1621是128 点内存映象和多功能的LCD驱动器HT1621 的软件配置特性使它适用于多种LCD应用场合包括LCD模块和显示子系统用于连接主控制器和HT1621的管脚只有4 或5 条HT1621 还有一个节电命令用于降低系统功耗。
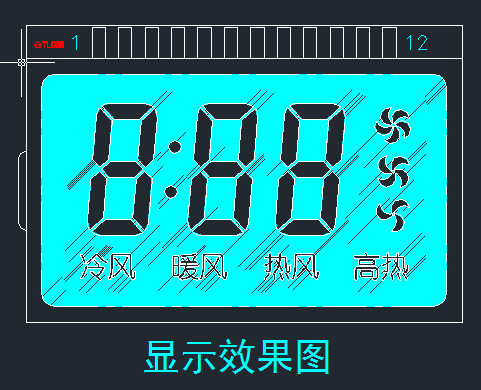
在使用HT1621进行驱动时,首先得根据订做的液晶进行原理设置。驱动液晶实际上就是往HT1621的内部寄存器中写数据,至于数据如何去驱动液晶我们可以不去理会它。下面也一款订做的液晶为例进行说明:

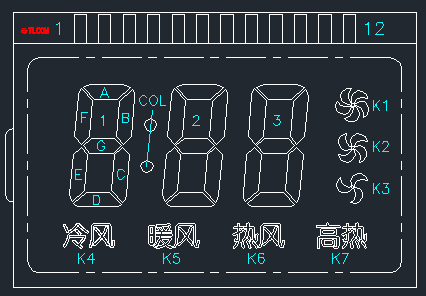
资源分配如下,3个数码管每个数码管由7段组成,还有3个风速图标,4个温度图标和一个冒号图标。


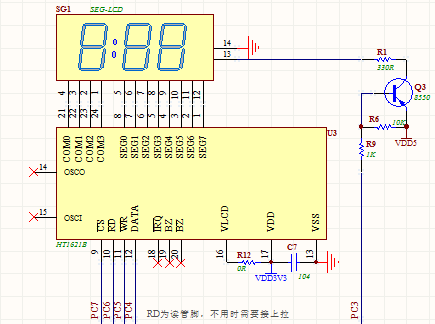
在这里我们可以COM口对应连接,Seg端口按照顺序连接5~12脚,得到的图纸如下:

有了这个原理图,后面我们就可以设计驱动程序了,在设计驱动程序之前,必须认识到一个问题,段式液晶是由很多段或者图标、点构成,从而构成的显示图案。而这些多、图标、点都是由HT1621的寄存器中的位组成的,所以,如果驱动程序按照位进行控制,将给我很大的方便和灵活。
但是我们知道,除了C51提供位操作为,其他单片机并不提供位操作的定义方式,但是,基本上所有的编译器都提供位段的定义方式,所以下面我们将使用位段进行定义:
由原理图和液晶资料我们可以看出,Seg0对应第一个数码管的F、G、E三段,Seg1对应第一个数码管的A、B、C、D四段。而第二个数码管和第三个数码管的每一段顺序与第一个相同。所以,我们可以使用与第一个数码管相同的结构体进行三个数码管的定义,当然有时候每个数码管的每一段顺序并不一定相同,这个是由段式液晶在设计时的走线确定的。如果每一个数码的顺序不同,我们就得分别定义其结构体了。
typedef union
{
struct
{
u8 DA : 1; //
u8 DB : 1; //
u8 DC : 1; //
u8 DD : 1; //
u8 Rcv : 4; //
} BtL;
struct
{ //
u8 DF : 1; //
u8 DG : 1;
u8 DE : 1; //
u8 DO : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_SEG;
在这里,我们把同一个数码管的7段定义在一个结构体中,如果使用F、G、E三个段式,我们使用BtH这个变量,如果使用A、B、C、D四段时,我们使用BtL这个变量。当然,我们也可以把这两个分开定义。由于第二个数码管多了个冒号,同样把其放入BtH变量中,第一个和第三个数码管中没有使用这个位,不用即可。
typedef union
{
struct
{
u8 K1 : 1; //
u8 K2 : 1; //
u8 K3 : 1; //
u8 Rcv : 5; //
} BtL;
struct
{
u8 K7 : 1; //
u8 K6 : 1; //
u8 K5 : 1; //
u8 K4 : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_ICN;
用同样的方法定义剩余的图标,获得上面的结构体。由此我们看出,每个寄存器实际上只使用了前面4个位,后面的4个位没有使用,保留。
typedef struct
{
HTB_SEG Seg0;
HTB_SEG Seg1;
HTB_SEG Seg2;
HTB_SEG Seg3;
HTB_SEG Seg4;
HTB_SEG Seg5;
HTB_ICN Seg6;
HTB_ICN Seg7;
} HTB_RAM;
HTB_RAM HTBRam;
最后我们把使用的8个寄存器分别使用上面的结构体变量进行定义,前面6个为数码管,后面2个为图标。有了这个结构体,后面定义一个变量用于操作每个数码管。
数码管显示驱动如下,从0~9通过控制每一段形成字符:
/**************************************************************************************
* FunctionName : HTB_SegVal()
* Description : 数码管填值
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SegVal(HTB_SEG *pSg1, HTB_SEG *pSg2, u8 dat)
{
switch (dat)
{
case '0': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 0; break;
case '1': pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case '2': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 0; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case '3': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case '4': pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case '5': pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case '6': pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case '7': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case '8': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case '9': pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case ' ': pSg2->BtL.DA = 0; pSg2->BtL.DB = 0; pSg2->BtL.DC = 0; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
default: break;
}
}
/**************************************************************************************
* FunctionName : HTBColon()
* Description : 冒号
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBColon(OS_SWT swt)
{
HTBRam.Seg2.BtH.DO = (swt > 0) ? 1 : 0;
}
/**************************************************************************************
* FunctionName : HTBTemStl()
* Description : 温度
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBTemStl(u8 stl)
{
HTBRam.Seg7.BtH.K4 = 0;
HTBRam.Seg7.BtH.K5 = 0;
HTBRam.Seg7.BtH.K6 = 0;
HTBRam.Seg7.BtH.K7 = 0;
switch (stl)
{
case 0: HTBRam.Seg7.BtH.K4 = 1; break;
case 1: HTBRam.Seg7.BtH.K5 = 1; break;
case 2: HTBRam.Seg7.BtH.K6 = 1; break;
case 3: HTBRam.Seg7.BtH.K7 = 1; break;
default : break;
}
}
/**************************************************************************************
* FunctionName : HTBWndStl()
* Description : 风速
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBWndStl(u8 stl)
{
HTBRam.Seg6.BtL.K1 = 0;
HTBRam.Seg6.BtL.K2 = 0;
HTBRam.Seg6.BtL.K3 = 0;
switch (stl)
{
case 0: HTBRam.Seg6.BtL.K3 = 1; break;
case 1: HTBRam.Seg6.BtL.K2 = 1; break;
case 2: HTBRam.Seg6.BtL.K1 = 1; break;
default : break;
}
}
图标的驱动如上,其实就是根据需要修改每一个寄存器位,这个寄存器修改后,我们还必须得传递给HT1621更新显示,才能真正实现显示的驱动:
/**************************************************************************************
* FunctionName : HTB_SendBitMsb()
* Description : 发送发送多位[高位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitMsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
{
(dat & 0x80) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat <<= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendBitLsb()
* Description : 发送多位[低位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitLsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
{
(dat & 0x01) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat >>= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendCmd()
* Description : 发送命令
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendCmd(u8 cmd)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0x80, 3); // 前面3位命令代码
HTB_SendBitMsb(cmd, 9); // 后面10位: a5~a0[RAM地址]+d3~d0[RAM数据]
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
/**************************************************************************************
* FunctionName : HTBSendNDat()
* Description : 发送N数据
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBSendNDat(u8 addr, u8 *pDat, u8 cnt, u8 bitNum)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0xA0, 3); // 前面3位命令代码
HTB_SendBitMsb(addr<<2, 6); // a5~a0[RAM地址]
for (u8 i=0; i
{
HTB_SendBitLsb(*pDat++, bitNum); // RAM数据
}
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
上面的函数是通过按位传递的方式把数据发给HT1621,并不复杂,这里就不相信介绍了:
typedef enum
{
HTB_CMD_BIAS = 0x29, // 0B:0010 abXc -ab控制占空比,-c控制偏压
HTB_CMD_SYSEN = 0x01, //
HTB_CMD_LCDOFF = 0x02, //
HTB_CMD_LCDON = 0x03, //
} HTB_CMD;
最后,我们可以看出,在修改了全局变量后,在把更新的数据传递给驱动芯片就可以了,非常简单方便灵活,这个示例让我们充分了解和使用位段进行位控制是非常方便。
上一篇:MSP430F5529的IO口管脚的中断学习笔记
下一篇:单片机开关机的实现
推荐阅读最新更新时间:2024-03-16 15:00
关于ISA设备的驱动程序转换为PCI设备的Windows驱动程序设计
摘要: 本文主要针对已经研制好的ISA设备通过加上一个简单的PCI接口芯片便能正常工作在PCI模式下,实现由ISA扩展板到PCI扩展板的转换。这时我们必须重新编写设备的驱动程序才能使设备在Windows/Nt操作系统下正常工作。这里主要给出Windows下的解决方案和程序实例。 关键词: ISA设备驱动程序 PCI设备驱动程序 IRQ PCI配置空间 随着计算机和通信技术的高速发展,ISA总线在速度、功能上已经成为系统的瓶颈,而功能更强大的PCI总线成为首选。这时对现有的ISA设备稍加设计就可在PCI总线下工作就显得非常总要,但我们必须重新编写
[应用]
为什么还在使用继电器驱动汽车电机?

随着汽车电气系统中更小更智能的集成电路(IC)的出现,是时候开始正视房间里的“大象”了:为什么我们仍然使用继电器控制汽车天窗、窗玻璃升降装置、电动锁、后行李箱盖提升装置、记忆座椅、压缩机以及车上的各种泵?虽然,继电器价格亲民且易于设计,但是由于它们的使用寿命有限且体积较大,因此它们的功能对于现代电机应用来说稍显笨重。对于一个安静、小型而安全的解决方案而言,固态IC是汽车电机控制应用的最佳选择。 解决方案尺寸 让我们比较两种解决方案,如图1所示的是具有相同的电压和电流额定值的典型继电器解决方案及等效固态解决方案。 图1:继电器解决方案与固态解决方案 仅针对解决方案尺寸,固态8mm×8mm四方扁平无引线(QFN)和两个
[汽车电子]

Intersil新型大电流MOSFET栅极驱动器
2008 年 5 月 16 日 , Intersil 公司今天宣布,推出高频 6A 吸入电流同步( sink synchronous ) MOSFET 栅极驱动器 ISL6615 和 ISL 6615A 。这些新器件有助于为系统安全提供更高的效率、灵活性和更多的保护功能。 Intersil 公司此次推出的新型驱动器增加了栅极驱动电流( UGATE 的流出和吸入栅极驱动电流为 4A , LGATE 的吸入和流出电流则分别为 6A 和 4A ),可以缩短栅极电压上升、下降时间。这将最大限度地降低开关损耗并改善效率
[新品]
臭氧电源驱动保护电路的设计与实现
摘要:介绍了臭氧逆变电源的整体设计和IGBT对驱动电路的设计要求,指出了用EXB841直接驱动IGBT时存在的问题和不足,提出了应用ExB84l设计驱动电路的改进用法,并将优化电路成功应用于臭氧电源中。关键词:臭氧电源;IGBT;EXB841 O 引言 用介质阻挡放电法(DBD法)的大功率臭氧发生设备已广泛应用于自来水、泳池水处理以及污废水的深度处理,在提高生活用水质量和环境保护领域起着越来越重要的作用。臭氧发生设备的关键技术是用IGBT实现的高压逆变电源,而IGBT的可靠驱动与保护是高性能电源的重要保障。JGBT专用驱动芯片EXB841,具有正负偏压、过流检测、故障保护和软关断等主要功能特征,在300A容量以下的IGBT驱动中得到
[电源管理]
3款LED显示屏驱动芯片比较
LED显示屏作为一项高科技产品引起了人们高度重视,采用计算机控制,将光、电融为一体的大屏幕智能显示屏已经应用到很多领域。LED显示屏的像素点采用LED发光二极管,将许多发光二极管以点阵方式排列起来,构成LED阵列,进而构成LED屏幕。通过不同的LED驱动方式,可得到不同效果的图像。因此驱动芯片的优劣,对LED显示屏的显示质量起着重要的作用。
LED驱动芯片可分为通用芯片和专用芯片。通用芯片一般用于LED显示屏的低端产品,如户内的单、双色屏等。最常用的通用芯片是74HC595,具有8位锁存、串一并移位寄存器和三态输出功能。每路最大可输出35mA 电流(不是恒流)一般IC厂家都可生产此类芯片。
由于LED电流特性器件,即在饱和
[嵌入式]
STM32直流电机启动(一)驱动电路的介绍
驱动电路 典型的H桥驱动电路如下: 要使电机旋转只需导通对角线上的两个三极管即可,如导通Q1,Q4,关闭Q2,Q4即可驱动电机正转; 若想电机反向转动,即导通三极管Q2,Q3,关闭Q1,Q4。 此时电路图可简化为如下所示: 但当我们直接导通一个半桥上的Q1,Q3(或Q2,Q4)时,电源被短接,由于三极管电阻很小,此时流过三极管的电流很大,非常容易烧坏三极管,因此实际运用中一定不能导通同一个半桥上的三极管。 但是在实际情况中,三极管导通/关闭和电路中的其它原件操作都存在一定延时的,因此不能简单的认为,只需要同时将Q1,Q4导通,Q2,Q3关闭即可驱动电机; 为避免上述情况的发生,一般有如下两种方式: 1.硬件上采
[单片机]
s3c2410触摸屏驱动(2.6内核)分析
s3c2410触摸屏驱动驱动不是很多,在此把它贴出来然后加上必要的注释: #include linux/config.h #include linux/errno.h #include linux/kernel.h #include linux/module.h #include linux/slab.h #include linux/input.h #include linux/init.h #include linux/serio.h #include linux/delay.h #include asm/io.h #include asm/irq.h #include asm/arch/regs-adc
[单片机]
触摸屏驱动程序的设计和实现
式设备触摸屏按其技术原理可分为五类:矢量压力传感式、电阻式、电容式、红外线式和表面声波式。其中电阻式触摸屏在嵌入式系统中用的较多,电阻式触摸屏可分为四线、五线、七线等几种。一般来说,WinCE触摸屏驱动的设计和实现有以下几个步骤:
(1)配置和初始化触摸屏
触摸屏驱动在初始化过程会调用TouchPanelEnable函数,该函数调用的DDSI函数为DdsiTouchPanelEnable和 DdsiTouchPanelDisable。这两个DDSI接口函数是驱动实现的关键所在,分别用于打开和关闭触摸屏硬件。但是为了降低功耗,这两个函数其实可以不真正操作硬件,而只是实现软件上的控制。
同时,在初始化时
[嵌入式]
 汽车维修基础训练丛书:教你认识汽车电子控制器
汽车维修基础训练丛书:教你认识汽车电子控制器 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章







更多热门文章
更多每日新闻
更多往期活动
11月25日历史上的今天
厂商技术中心




电子工程世界版权所有
京B2-20211791
京ICP备10001474号-1
电信业务审批[2006]字第258号函
 京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2024 EEWORLD.com.cn, Inc. All rights reserved