最近做用430结果被BT定时器折腾了。BT定时器和以前接触过的AVR的普通定时器不太一样。以前的定时器都是计数到FF然后产生溢出中断。而BT定时器不一样。
关键字:MSP430 定时器 中断时间
引用地址:MSP430 basic timer 基本定时器中断时间的计算

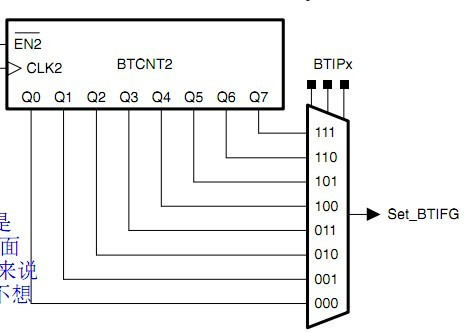
BT定时器是在相应的选择位产生进位的情况下产生中断的。比如说,如果我们选中BTIPx为001的话,那么BTCNT2中的数据为 0x00,0x01,0x02,0x03然后在0X04的时候,也就是在Q1向Q2进位的时候产生中断。而且不管高位的数据,这个例子中Q3-Q7中的数据没有任何影响。
上一篇:MSP430 位操作C语言编程
下一篇:单片机MSP430学习笔记
推荐阅读最新更新时间:2024-03-16 15:05
单片机定时器/计数器基本原理

本文主要学习定时器/计数器的基本概念。首先从日常生活中的计数和定时的概念入手,来理解定时器/计数器功能的实现逻辑。一个比较重要的知识点是溢出,当定时器/计数器计满时,会产生 溢出 的动作,进而产生中断。同时,还可以进一步了解实现定时或计数的三种主要的方法。 一、定时/计数的基本概念 定时和计数是日常生活和生产中最常见和最普遍的问题。 定时器和计数器功能基本上都是使用相同的逻辑实现的,而且这两个功能都包含输入的计数信号,本质上都是对脉冲计数。计数器用来计数并指示在任意间隔内输入信号(事件)的个数,而定时器则对规定间隔内输入的信号个数进行计数,用来指示经历的时间。 在单片机中,定时/计数器作定时功能用时,对机器周期计数(由单片机的
[单片机]

msp430单片机的ds18b20测温度c程序
#include msp430x16x.h #define DS18B20_DIR P2DIR #define DS18B20_IN P2IN #define DS18B20_OUT P2OUT #define DS18B20_DQ BIT3 //定义DS18B20的接口 #define DS18B20_DQ_2 BIT4 //定义另一个DS18B20的接口 // DS18B20 ROM命令宏定义 #define ReadRom 0x33 #define MatchRom
[单片机]
msp430f149单片机+4*4键盘+1602程序
调试好的msp430f149接4*4键盘代码 单片机源程序如下: #include msp430x14x.h #include 1602.h #define uchar unsigned char #define uint unsigned int #define key_DIR P5DIR #define key_OUT P5OUT #define key_IN P5IN uchar keymap ={0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15}; uchar i,j; uchar checkkey(void) { return(key_IN^0xf0); } uchar getk
[单片机]
STM32F103系列的单片机定时器详解
STM32F103系列的单片机一共有11个定时器,其中: 2个高级定时器 4个普通定时器 2个基本定时器 2个看门狗定时器 1个系统嘀嗒定时器 8个定时器分成3个组; TIM1和TIM8是高级定时器 TIM2-TIM5是通用定时器 TIM6和TIM7是基本的定时器 这8个定时器都是16位的,它们的计数器的类型除了基本定时器TIM6和TIM7都支持向上,向下,向上/向下这3种计数模式 计数器三种计数模式 向上计数模式:从0开始,计到arr预设值,产生溢出事件,返回重新计时 向下计数模式:从arr预设值开始,计到0,产生溢出事件,返回重新计时 中央对齐模式:从0开始向上计数,计到arr产生溢出事件,然后向下计数,计数到1以后,又产
[单片机]
【MSP430】捕获模式测量信号占空比
代码来自2016北斗杯,用于测量空气pm2.5,该传感器通过测量信号的占空比估计颗粒浓度 (1)TimerB设置,工作在捕获模式: void TimerB_Init(){ TBCCTL0&=~(CCIS1+CCIS0); // 捕获源为P4.0,即CCI0A(也是CCI0B) TBCCTL0|=CM_2+SCS+CAP; //下降沿捕获,同步捕获,工作在捕获模式 TBCCTL0|=CCIE; //允许捕获比较模块提出中断请求 TBCTL|=ID_3; TBCTL|=TBSSEL_2; //选择时钟MCLK TBCTL|=TBCLR;
[单片机]
51 机器周期 时钟周期 晶振频率 定时器初值计算
背景:51单片机引出的概念。 1 机器周期 在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段,每一阶段完成一项工作。例如,取指令、存储器读、存储器写等,这每一项工作称为一个基本操作。完成一个基本操作所需要的时间称为机器周期(如单片机中 计数器 完成加1这个过程也是一个机器周期)。一般情况下,一个机器周期由若干个S周期(时钟周期)组成。通常用内存中读取一个指令字的最短时间来规定CPU周期,(也就是 计算机通过内部或外部总线进行一次信息传输从而完成一个或几个微操作所需要的时间)),它一般由12个时钟周期组成。 2 时钟周期 时钟周期=1秒/晶振频率,晶振频率的值即为时钟频率的值。因此单
[单片机]
利用555定时器构成白光LED电压调节器的方法
本文以一个555定时器为主要器件构成电压调节电路(如图所示),用来控制一个或多个白光LED。定时器IC1与R1、R2、C2构成了可复位非稳态多谐振荡器。 首次输入电压V S 后,D1将使存储电容器C1充电直到其电压略低于V S 。最初,晶体管Q2处于截止状态,IC1的复位输入为高电平,输出端(OUTPUT)为高电平,以让电流能经过R1给C2充电。 这段时间内,R4拉动放电端(DISCHARGE)导通晶体管Q1,电感L1中的电流I L 开始斜线增大。由于Q1饱和,因此D3和LED都处于反向偏压状态。 当C2的电压超过IC1中管脚6的极限电压(THRESHOLD)时,输出端(OUTPUT)与放电端(DISCHARGE)都变为低电平
[工业控制]
 独辟蹊径品内核: Linux 内核源代码导读
独辟蹊径品内核: Linux 内核源代码导读 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月13日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号