最近由于有些时间,于是想起了做一个PID设计,在网上收集了不少关于PID控制的理论,于是计划用mega16L做一个PID测试程序,发现一些意想不到的误差,不知各位同仁是否有遇到与我的类似的现象:我定义了一个PID结构体,在初始化的时候无法把每个元素的初始化值设置为0(见下面的仿真图),而且,PID结构体中的部分参数是应该不变的,在整个PID运算中,但是不应该变化的参数却在PID运算发生了变化,不知道是什么原因,到现在也无法查出原因。有兴趣的朋友可以一起参与讨论或有经验的朋友 给与相关帮助,谢谢!
详细的代码和仿真情况如下:(我的硬件系统是本站的min Mega16/32 + JTAG ICE)
关键字:AVR ATMega16 PID 控制算法
引用地址:基于AVR ATMega16 的PID 控制算法程序
详细的代码和仿真情况如下:(我的硬件系统是本站的min Mega16/32 + JTAG ICE)
- #include "config.h"
- struct _PID
- {
- float PVn; //反馈信号变量
- float SPn; //设定值
- float Mn; //PID运算结果
- float Kc; //比例系数
- float Ts; //采样时间(ms)
- float Ti; //积分时间(ms)
- float Td; //微分时间(ms)
- float Mx; //积分项调整参数
- float PVn_1;//前一次反馈变量
- float MPn; //比例项的结果值
- float MIn; //积分项的结果值
- float MDn; //微分项的结果值
- };
- struct _PID *myPID;
- void init_myPID(void);
- void init_ports(void);
- void init_device(void);
- float MPn_value(struct _PID *PID);
- float MIn_value(struct _PID *PID);
- float MDn_value(struct _PID *PID);
- float Mx_value(struct _PID *PID);
- float Mn_value(struct _PID *PID);
- void main (void)
- {
- init_device();
- init_myPID();
- myPID->SPn = 155.5;
- myPID->Kc = 13.2;
- myPID->Ts = 0.2;
- myPID->Ti = 600.0;
- myPID->Td = 0.0;
- myPID->PVn = 108.2;
- while(1)
- {
- myPID->MPn = MPn_value(myPID);
- myPID->MDn = MDn_value(myPID);
- myPID->Mx = Mx_value(myPID);
- myPID->MIn = MIn_value(myPID);
- myPID->Mn = Mn_value(myPID);
- myPID->PVn_1 = myPID->PVn;
- }
- }
- /******************************************************************************/
- void init_myPID(void)
- {
- myPID->PVn = 0.0;
- myPID->SPn = 0.0;
- myPID->Mn = 0.0;
- myPID->Kc = 0.0;
- myPID->Ts = 0.0;
- myPID->Ti = 0.0;
- myPID->Td = 0.0;
- myPID->Mx = 0.0;
- myPID->PVn_1 = 0.0;
- myPID->MPn = 0.0;
- myPID->MIn = 0.0;
- myPID->MDn = 0.0;
- }
- //------------------------------------------------------------------------------
- void init_ports(void)
- {
- PORTA = 0x00; //If ADC Function was be used,the PORTA could`t set bit 1
- DDRA = 0x00; //the port set input mode.
- PORTB = 0x00;
- DDRB = 0x00;
- PORTC = 0x00; //m103 output on
ly - DDRC = 0x00;
- PORTD = 0x00;
- DDRD = 0x00;
- }
- //------------------------------------------------------------------------------
- void init_device(void)
- {
- CLI();
- init_ports();
- MCUCR = 0x00; //Set Power control(State:Close)
- GICR = 0x00; //Set boot guide(State:Close).
- SEI(); //re-enable interrupts
- //all peripherals are now initialized
- }
- // 计算 比例项的值
- //------------------------------------------------------------------------------
- float MPn_value(struct _PID *PID)
- {
- float myMPn = 0.0;
- myMPn = PID->Kc *( PID->SPn - PID->PVn);
- return myMPn;
- }
- //计算积分项的值
- //------------------------------------------------------------------------------
- float MIn_value(struct _PID *PID)
- {
- float myMIn = 0.0;
- myMIn = PID->Kc*(PID->Ts/PID->Ti)*(PID->SPn - PID->PVn) + PID->Mx;
- return myMIn;
- }
- //计算微分项的值
- //------------------------------------------------------------------------------
- float MDn_value(struct _PID *PID)
- {
- float myMDn = 0.0;
- myMDn = PID->Kc * (PID->Td/PID->Ts) * (PID->PVn_1 - PID->PVn);
- return myMDn;
- }
- //计算PID的结果
- //------------------------------------------------------------------------------
- float Mn_value(struct _PID *PID)
- {
- float myMn = 0.0;
- myMn = PID->MPn + PID->MIn + PID->MDn;
- return myMn;
- }
- //计算积分项的调整值
- //------------------------------------------------------------------------------
- float Mx_value(struct _PID *PID)
- {
- float myMx = 0.0;
- if(PID->Mn > 1.0)
- {
- myMx = 1.0 - (PID->MPn + PID->MDn);
- }
- else if(PID->Mn < 0.0)
- {
- myMx = -(PID->MPn + PID->MDn);
- }
- return myMx;
- }

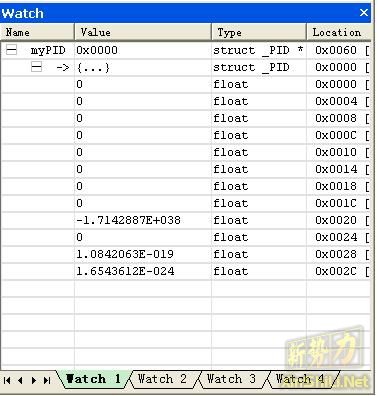
运行到PID初始化函数:void init_myPID(void)时的仿真结果如下:无法全部初始化为0

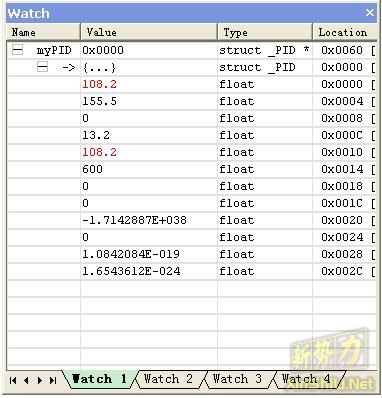
运行到:
myPID->SPn = 155.5;
myPID->Kc = 13.2;
myPID->Ts = 0.2;
myPID->Ti = 600.0;
myPID->Td = 0.0;
myPID->PVn = 108.2;
重新赋值后,部分参数Ts并不为0.2
上一篇:AVR ISP下载线在AVR Studio环境下的下载方法
下一篇:avr中断使用例子
推荐阅读最新更新时间:2024-03-16 15:10
基于AVR微控制器的蓄电池充放电控制器的设计

摘要: 针对539CH-1型Ni-Cd电池,提出一种基于 AVR 微控制器的蓄电池充、放电控制器。该控制器以Mega16L为核心,根据上位机的命令控制蓄电池的充、放电电流值以及放电电阻的接入时机。 关键词: 蓄电池; AVR 微控制器;TLV5638;电源控制 引言 蓄电池是飞行器电源系统中重要的组成部分,蓄电池的性能直接影响飞行器的安全。因此,正确维护、保养蓄电池就成为一项十分重要的工作。539CH-1型Ni-Cd蓄电池是法国SAFT公司生产的碱性蓄电池,该电池包含20个单体电池,额定电压24V,额定容量53Ah。波音737客机即采用该型蓄电池。 充电和放电是该电池维护、保养中的主要工作。由于该电池为Ni-Cd
[单片机]

应用AVR单片机制作电子打铃仪的思路
AVR具有512个字节的片内EEPROM,利用它可以记录事先设定的打铃时间(如果每个时间条需要2个字节,则存储的时间条可以200多个),然后将AVR制作成电子钟,在某个时间内,扫描并取出片内存储的时间条,与当前时间进行对比,如果吻合,则打铃。 下面是打铃仪(成熟产品)的具体设计思路: 1、硬件方面:用有备用电池供电的日历芯片DS1302作电子钟的标准时间,AVR外置I2C存储器,LED作状态和时间显示,四至五个轻触开关作控制,输出采用无触点方案。供电:12V直流/220V两用,没有市电自动转换12V蓄电池供电。 控制开关的分配:时分调整2个,功能转换1个,存储或显示记录打铃点1个,备用1个。 2、软件方面:从存储
[单片机]
PID控制的原理及常用口诀总结
PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元比例P(proportion)、积分单元 I(integration)和微分单元D(differentiation)组成。PID控制器作为最早实用化的控制器已有近百年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。 1.PID常用口诀:
参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差
[嵌入式]
基于AVR单片机和EM4094射频卡读写基站的多协议读写器的设计
引言 射频识别(RFID)是利用无线方式对电子数据载体(电子标签)进行识别的一种新兴技术。与接触式IC卡和条形码识别等系统比较,它有着巨大的优势。利用射频识别技术,能有效实现对数量大、分布区域广的信息进行智能化管理,达到高效快捷运作的目的,特别是在第二代身份证、物流、交通航运、自动收费、超市、门禁系统管理、服务领域等方面有着广泛的应用前景。随着我国国民经济的快速发展,国内RFID行业也正经历着深刻的变革。 RFID系统一般是由读写器、射频卡、应用软件来组成。其中读写器的设计是至关重要的,它决定了系统的稳定性和准确性。 除了要求其能支持一系列协议、标准和收发器外,对读写器可能还有其它功能性方面的要求,如高性能、防冲突、远/近感应距离
[单片机]
AVR单片机的RTOS-AVRX应用
简介:AVRX是一个不错的RTOS,最显著的特点就是内核小,速度快,编译后大概只需500~700字节,且基本的调度功能一个也不少。由于其代码公开,结合不同型号AVR单片机的特性,可以在此基础上进行系统的裁减和扩展,使之能达到更好的效果,本文为AVR嵌入式系统的应用提供了借鉴。 引言 随着技术的发展,嵌入式系统的设计及应用对人们的生活产生了很大的影响,并将逐渐改变人们未来的生活方式,在特定的操作系统上开发应用程序,可以使开发人员忽略掉很多底层硬件细节,使得应用程序调试更方便、易于维护、开发周期缩短并且降低开发成本,因而嵌入式操作系统深得开发人员的青睐。 AVR微处理器是Atmel公司开发的8位嵌入式RISC处理器,它具有
[单片机]
LCD1602高手使用详解
前面总算走完了对AVR MEGA16这块单片机的一些基本的应用方式了,这时候大家对AVR的一些内部资源比如定时器,ADC,最主要的IO口的使用方式应该有了一个虽比较粗浅但是却比较形象的认识了。这节我们来看使用单片机的另外一大主题,就是用单片机来实现芯片控制。 在前面的数码管显示一文中,就已经涉及到了用单片机来控制芯片为我们工作,CEPARK AVR开发板,为了达到增强驱动能力和节省IO口的作用,运用了移位寄存器74HC595来驱动两个四位八段数码管,是一个十分有创意的设计。但是前面的内容重心还是集中于对AVR的IO口的控制,所以,我们从这节开始要正式逐渐深入的接触各种芯片了。 先做个引子。单片机是一种微控制器,本身内部集成了数
[单片机]
爱特梅尔成立深圳大学–Atmel AVR微控制器实验室
爱特梅尔公司(Atmel® Corporation) 宣布,基于企业与高校联手培养合格工程师的共同目标,深圳大学–Atmel AVR微控制器实验室于2010年4月29日正式挂牌成立,成为爱特梅尔公司在中国地区的11个AVR微控制器大学实验室之一。该实验室将承担机电与控制工程学院本科生微控制器的实践教学,并作为深圳大学机电与控制工程学院的科研实践基地,成为推动双方长远发展、更好合作的开端。 深圳大学–Atmel AVR微控制器实验室成立暨揭牌仪式于4月29日在深圳大学科技楼3号报告厅举行。深圳大学副校长阮双琛教授、深圳大学教务处处长徐晨教授、深圳大学设备处副处长张红兵教授、机电与控制工程学院院长徐刚教授、机电与控制工程
[单片机]
基于AVR单片机的ISP1362OTG设计
0 引言 随着PDA、移动电话、数码相机、打印机等消费类产品的普及,用于这些设备与电脑、或设备与设备之间的高速数据传输技术越来越受到人们的关注。以往以计算机为核心的数据传输结构,非常不利于USB,总线在嵌入式行业的应用,也不适用于野外作业,而OTG技术的推出则可实现在没有PC的情况下,设备与设备之间的数据传输,它拓展了USB技术的应用范围。本文采用的设计方案是基于Philips公司的ISP1362 OTG控制芯片,参照最新的USB OTG技术规范,设计了一种遵循USB协议的主/从机系统。 1 ISP1362芯片的内部结构 Philips公司的ISP1362是一款符合USB 2.0总线协议的接口芯片,内部有
[单片机]
 交流伺服电机及其控制 (寇宝泉,程树康编著)
交流伺服电机及其控制 (寇宝泉,程树康编著) 基于rp2040的智能信息牌源码
基于rp2040的智能信息牌源码 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章







更多热门文章
更多每日新闻
更多往期活动
11月13日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号