段式液晶由于其功耗低、价格便宜在很多家电中得到广泛的应用,其驱动其实并不复杂,大多是情况下都是用HT1621B进行驱动。
关键字:HT1621B 段式液晶模块 驱动应用
引用地址:基于HT1621B段式液晶模块的驱动应用
HT1621是128 点内存映象和多功能的LCD驱动器HT1621 的软件配置特性使它适用于多种LCD应用场合包括LCD模块和显示子系统用于连接主控制器和HT1621的管脚只有4 或5 条HT1621 还有一个节电命令用于降低系统功耗。
在使用HT1621进行驱动时,首先得根据订做的液晶进行原理设置。驱动液晶实际上就是往HT1621的内部寄存器中写数据,至于数据如何去驱动液晶我们可以不去理会它。下面也一款订做的液晶为例进行说明:

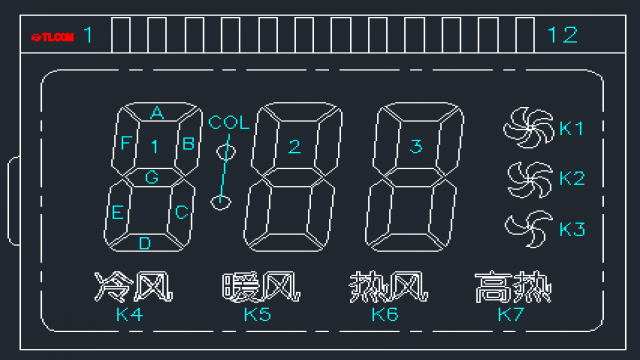
资源分配如下,3个数码管每个数码管由7段组成,还有3个风速图标,4个温度图标和一个冒号图标。

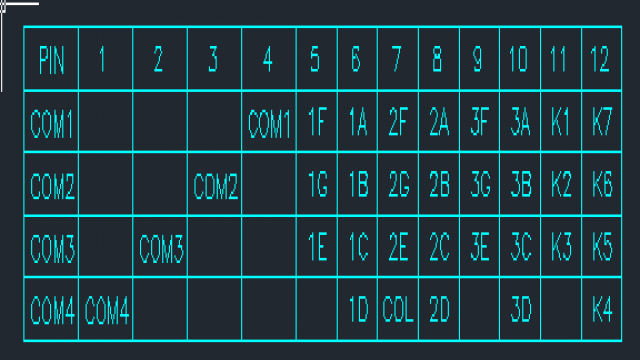
我们知道HT1621是由4个COM口和18个Seg接口构成,COM口的连接和简单,直接对应连接即可,而Seg可以根据你的PCB布局、连线的方便等进行选择性连接。
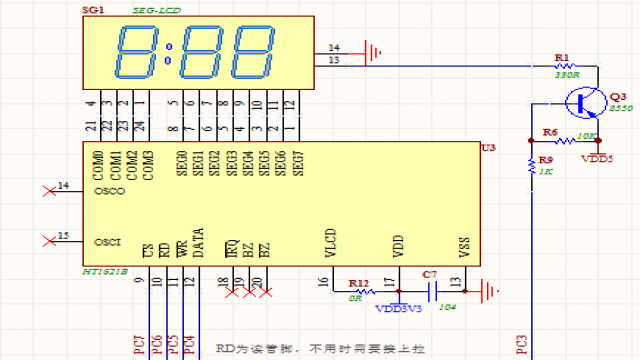
在这里我们可以COM口对应连接,Seg端口按照顺序连接5~12脚,得到的图纸如下:


有了这个原理图,后面我们就可以设计驱动程序了,在设计驱动程序之前,必须认识到一个问题,段式液晶是由很多段或者图标、点构成,从而构成的显示图 案。而这些多、图标、点都是由HT1621的寄存器中的位组成的,所以,如果驱动程序按照位进行控制,将给我很大的方便和灵活。
但是我们知道,除了C51提供位操作为,其他单片机并不提供位操作的定义方式,但是,基本上所有的编译器都提供位段的定义方式,所以下面我们将使用位段进行定义:
由原理图和液晶资料我们可以看出,Seg0对应第一个数码管的F、G、E三段,Seg1对应第一个数码管的A、B、C、D四段。而第二个数码管和第三个数码 管的每一段顺序与第一个相同。所以,我们可以使用与第一个数码管相同的结构体进行三个数码管的定义,当然有时候每个数码管的每一段顺序并不一定相同,这个 是由段式液晶在设计时的走线确定的。如果每一个数码的顺序不同,我们就得分别定义其结构体了。
typedef union
{
struct
{
u8 DA : 1; //
u8 DB : 1; //
u8 DC : 1; //
u8 DD : 1; //
u8 Rcv : 4; //
} BtL;
struct
{ //
u8 DF : 1; //
u8 DG : 1;
u8 DE : 1; //
u8 DO : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_SEG;
在这里,我们把同一个数码管的7段定义在一个结构体中,如果使用F、G、E三个段式,我们使用BtH这个变量,如果使用A、B、C、D四段时,我们使用 BtL这个变量。当然,我们也可以把这两个分开定义。由于第二个数码管多了个冒号,同样把其放入BtH变量中,第一个和第三个数码管中没有使用这个位,不 用即可。
typedef union
{
struct
{
u8 K1 : 1; //
u8 K2 : 1; //
u8 K3 : 1; //
u8 Rcv : 5; //
} BtL;
struct
{
u8 K7 : 1; //
u8 K6 : 1; //
u8 K5 : 1; //
u8 K4 : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_ICN;
用同样的方法定义剩余的图标,获得上面的结构体。由此我们看出,每个寄存器实际上只使用了前面4个位,后面的4个位没有使用,保留。
typedef struct
{
HTB_SEG Seg0;
HTB_SEG Seg1;
HTB_SEG Seg2;
HTB_SEG Seg3;
HTB_SEG Seg4;
HTB_SEG Seg5;
HTB_ICN Seg6;
HTB_ICN Seg7;
} HTB_RAM;
HTB_RAM HTBRam;
最后我们把使用的8个寄存器分别使用上面的结构体变量进行定义,前面6个为数码管,后面2个为图标。有了这个结构体,后面定义一个变量用于操作每个数码管。
数码管显示驱动如下,从0~9通过控制每一段形成字符:
/**************************************************************************************
* FunctionName : HTB_SegVal()
* Description : 数码管填值
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SegVal(HTB_SEG *pSg1, HTB_SEG *pSg2, u8 dat)
{
switch (dat)
{
case 0: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 0; break;
case 1: pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case 2: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 0; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case 3: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case 4: pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 5: pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 6: pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 7: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case 8: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 9: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 0: pSg2->BtL.DA = 0; pSg2->BtL.DB = 0; pSg2->BtL.DC = 0; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
default:break;
}
}
/**************************************************************************************
* FunctionName : HTBColon()
* Description : 冒号
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBColon(OS_SWT swt)
{
HTBRam.Seg2.BtH.DO = (swt > 0) ? 1 : 0;
}
/**************************************************************************************
* FunctionName : HTBTemStl()
* Description : 温度
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBTemStl(u8 stl)
{
HTBRam.Seg7.BtH.K4 = 0;
HTBRam.Seg7.BtH.K5 = 0;
HTBRam.Seg7.BtH.K6 = 0;
HTBRam.Seg7.BtH.K7 = 0;
switch (stl)
{
case 0: HTBRam.Seg7.BtH.K4 = 1; break;
case 1: HTBRam.Seg7.BtH.K5 = 1; break;
case 2: HTBRam.Seg7.BtH.K6 = 1; break;
case 3: HTBRam.Seg7.BtH.K7 = 1; break;
default : break;
}
}
/**************************************************************************************
* FunctionName : HTBWndStl()
* Description : 风速
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBWndStl(u8 stl)
{
HTBRam.Seg6.BtL.K1 = 0;
HTBRam.Seg6.BtL.K2 = 0;
HTBRam.Seg6.BtL.K3 = 0;
switch (stl)
{
case 0: HTBRam.Seg6.BtL.K3 = 1; break;
case 1: HTBRam.Seg6.BtL.K2 = 1; break;
case 2: HTBRam.Seg6.BtL.K1 = 1; break;
default : break;
}
}
{
struct
{
u8 DA : 1; //
u8 DB : 1; //
u8 DC : 1; //
u8 DD : 1; //
u8 Rcv : 4; //
} BtL;
struct
{ //
u8 DF : 1; //
u8 DG : 1;
u8 DE : 1; //
u8 DO : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_SEG;
在这里,我们把同一个数码管的7段定义在一个结构体中,如果使用F、G、E三个段式,我们使用BtH这个变量,如果使用A、B、C、D四段时,我们使用 BtL这个变量。当然,我们也可以把这两个分开定义。由于第二个数码管多了个冒号,同样把其放入BtH变量中,第一个和第三个数码管中没有使用这个位,不 用即可。
typedef union
{
struct
{
u8 K1 : 1; //
u8 K2 : 1; //
u8 K3 : 1; //
u8 Rcv : 5; //
} BtL;
struct
{
u8 K7 : 1; //
u8 K6 : 1; //
u8 K5 : 1; //
u8 K4 : 1; //
u8 Rcv : 4; //
} BtH;
} HTB_ICN;
用同样的方法定义剩余的图标,获得上面的结构体。由此我们看出,每个寄存器实际上只使用了前面4个位,后面的4个位没有使用,保留。
typedef struct
{
HTB_SEG Seg0;
HTB_SEG Seg1;
HTB_SEG Seg2;
HTB_SEG Seg3;
HTB_SEG Seg4;
HTB_SEG Seg5;
HTB_ICN Seg6;
HTB_ICN Seg7;
} HTB_RAM;
HTB_RAM HTBRam;
最后我们把使用的8个寄存器分别使用上面的结构体变量进行定义,前面6个为数码管,后面2个为图标。有了这个结构体,后面定义一个变量用于操作每个数码管。
数码管显示驱动如下,从0~9通过控制每一段形成字符:
/**************************************************************************************
* FunctionName : HTB_SegVal()
* Description : 数码管填值
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SegVal(HTB_SEG *pSg1, HTB_SEG *pSg2, u8 dat)
{
switch (dat)
{
case 0: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 0; break;
case 1: pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case 2: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 0; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case 3: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 1; break;
case 4: pSg2->BtL.DA = 0; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 5: pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 6: pSg2->BtL.DA = 1; pSg2->BtL.DB = 0; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 7: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
case 8: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 1; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 9: pSg2->BtL.DA = 1; pSg2->BtL.DB = 1; pSg2->BtL.DC = 1; pSg2->BtL.DD = 1;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 1; pSg1->BtH.DG = 1; break;
case 0: pSg2->BtL.DA = 0; pSg2->BtL.DB = 0; pSg2->BtL.DC = 0; pSg2->BtL.DD = 0;
pSg1->BtH.DE = 0; pSg1->BtH.DF = 0; pSg1->BtH.DG = 0; break;
default:break;
}
}
/**************************************************************************************
* FunctionName : HTBColon()
* Description : 冒号
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBColon(OS_SWT swt)
{
HTBRam.Seg2.BtH.DO = (swt > 0) ? 1 : 0;
}
/**************************************************************************************
* FunctionName : HTBTemStl()
* Description : 温度
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBTemStl(u8 stl)
{
HTBRam.Seg7.BtH.K4 = 0;
HTBRam.Seg7.BtH.K5 = 0;
HTBRam.Seg7.BtH.K6 = 0;
HTBRam.Seg7.BtH.K7 = 0;
switch (stl)
{
case 0: HTBRam.Seg7.BtH.K4 = 1; break;
case 1: HTBRam.Seg7.BtH.K5 = 1; break;
case 2: HTBRam.Seg7.BtH.K6 = 1; break;
case 3: HTBRam.Seg7.BtH.K7 = 1; break;
default : break;
}
}
/**************************************************************************************
* FunctionName : HTBWndStl()
* Description : 风速
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBWndStl(u8 stl)
{
HTBRam.Seg6.BtL.K1 = 0;
HTBRam.Seg6.BtL.K2 = 0;
HTBRam.Seg6.BtL.K3 = 0;
switch (stl)
{
case 0: HTBRam.Seg6.BtL.K3 = 1; break;
case 1: HTBRam.Seg6.BtL.K2 = 1; break;
case 2: HTBRam.Seg6.BtL.K1 = 1; break;
default : break;
}
}
图标的驱动如上,其实就是根据需要修改每一个寄存器位,这个寄存器修改后,我们还必须得传递给HT1621更新显示,才能真正实现显示的驱动:
/**************************************************************************************
* FunctionName : HTB_SendBitMsb()
* Description : 发送发送多位[高位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitMsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
(dat & 0x80) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat <<= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendBitLsb()
* Description : 发送多位[低位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitLsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
(dat & 0x01) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat >>= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendCmd()
* Description : 发送命令
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendCmd(u8 cmd)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0x80, 3); // 前面3位命令代码
HTB_SendBitMsb(cmd, 9); // 后面10位: a5~a0[RAM地址]+d3~d0[RAM数据]
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
/**************************************************************************************
* FunctionName : HTBSendNDat()
* Description : 发送N数据
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBSendNDat(u8 addr, u8 *pDat, u8 cnt, u8 bitNum)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0xA0, 3); // 前面3位命令代码
HTB_SendBitMsb(addr<<2, 6); // a5~a0[RAM地址]
for (u8 i=0; i
HTB_SendBitLsb(*pDat++, bitNum); // RAM数据
}
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
上面的函数是通过按位传递的方式把数据发给HT1621,并不复杂,这里就不相信介绍了:
typedef enum
{
HTB_CMD_BIAS = 0x29, // 0B:0010 abXc -ab控制占空比,-c控制偏压
HTB_CMD_SYSEN = 0x01, //
HTB_CMD_LCDOFF = 0x02, //
HTB_CMD_LCDON = 0x03, //
} HTB_CMD;
最后,我们可以看出,在修改了全局变量后,在把更新的数据传递给驱动芯片就可以了,非常简单方便灵活,这个示例让我们充分了解和使用位段进行位控制是非常方便。
/**************************************************************************************
* FunctionName : HTB_SendBitMsb()
* Description : 发送发送多位[高位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitMsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
(dat & 0x80) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat <<= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendBitLsb()
* Description : 发送多位[低位在前]
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendBitLsb(u8 dat, u8 cnt)
{
for (u8 i=0; i
(dat & 0x01) ? GPIO_WriteHigh(HTB_DT_PORT, HTB_DT_PIN) :
GPIO_WriteLow(HTB_DT_PORT, HTB_DT_PIN);
dat >>= 1;
GPIO_WriteLow(HTB_WR_PORT, HTB_WR_PIN);
HTB_DelayUs(3);
GPIO_WriteHigh(HTB_WR_PORT, HTB_WR_PIN);
}
}
/**************************************************************************************
* FunctionName : HTB_SendCmd()
* Description : 发送命令
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTB_SendCmd(u8 cmd)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0x80, 3); // 前面3位命令代码
HTB_SendBitMsb(cmd, 9); // 后面10位: a5~a0[RAM地址]+d3~d0[RAM数据]
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
/**************************************************************************************
* FunctionName : HTBSendNDat()
* Description : 发送N数据
* EntryParameter : None
* ReturnValue : None
**************************************************************************************/
void HTBSendNDat(u8 addr, u8 *pDat, u8 cnt, u8 bitNum)
{
GPIO_WriteLow(HTB_CS_PORT, HTB_CS_PIN);
HTB_SendBitMsb(0xA0, 3); // 前面3位命令代码
HTB_SendBitMsb(addr<<2, 6); // a5~a0[RAM地址]
for (u8 i=0; i
HTB_SendBitLsb(*pDat++, bitNum); // RAM数据
}
GPIO_WriteHigh(HTB_CS_PORT, HTB_CS_PIN);
}
上面的函数是通过按位传递的方式把数据发给HT1621,并不复杂,这里就不相信介绍了:
typedef enum
{
HTB_CMD_BIAS = 0x29, // 0B:0010 abXc -ab控制占空比,-c控制偏压
HTB_CMD_SYSEN = 0x01, //
HTB_CMD_LCDOFF = 0x02, //
HTB_CMD_LCDON = 0x03, //
} HTB_CMD;
最后,我们可以看出,在修改了全局变量后,在把更新的数据传递给驱动芯片就可以了,非常简单方便灵活,这个示例让我们充分了解和使用位段进行位控制是非常方便。
上一篇:基于STM8S的Atomthreads低功耗的深度思考
下一篇:USART模块接收中断的问题处理
推荐阅读最新更新时间:2024-03-16 15:10
二相步进电机驱动芯片TA8435H及其应用
摘要:TA8435H是东芝公司推出的一款单片步进电机专用驱动芯片。文中介绍了该芯片的特点、引脚功能和工作原理,给出了采用89C51和82C53作为控制核心驱动步进电机的具体电路和相关程序代码。
关键词:步进电机;TA8435H;细分驱动;82C53;89C51
1 主要特点
TA8435H是东芝公司生产的单片正弦细分二相步进电机驱动专用芯片,TA8435H可以驱动二相步进电机,且电路简单,工作可靠。该芯片还具有以下特点:
●工作电压范围宽(10V~40V);
●输出电流可达1.5A平均和2.5A峰值;
●具有整步、半步、1/4细分、1/8细分运行方式可供选择;
●采用脉宽调制式斩波驱动方式;
●具有正/反
[应用]
中文点阵液晶显示驱动器RA8816及其应用

液晶显示器由于它具有功耗低、体积小、重量轻、显示的信息量大,能显示各种类型的信息,如字符、图形(包括汉字、曲线、表格等),正越来越广泛地应用于各个领域,尤其是在便携设备中,更是占据着绝对主流的地位。 对于简单的信息显示,通常用段码式LCD驱动器,如盛群的HT1621等。而对于复杂的信息显示,则必须由点阵式LCD驱动器来驱动,最常见的点阵式LCD驱动器中,有不带中文字库的东芝LCD驱动器T6963 ,也有带中文字库的矽创LCD驱动器ST7920 。对于较大的应用系统,由于系统通常有足够大的存储空间,可以将中文字库放在系统的存储空间中,因此常选用不带中文字库的LCD模块;对于较小的应用系统,系统控制器本身的存储空间有限,且运行速
[电源管理]

电动汽车分布式电机驱动测试系统研究与应用
电动汽车分布式电机驱动测试系统研究与应用 摘要: 提出了一种基于CAN总线、GPIB总线和以太网的分布式电机驱动测试系统,并给出了系统网络拓扑图,详细说明其硬件构建和Labview下的软件实现,给出了系统误差分析结果。 关键词 :电动汽车;测试系统;GPIB;CAN;以太网 引言 随着能源和环境问题日益受到重视,电动汽车以其清洁无污染、能量效率高、低噪声、能源多样化等优点研究发展迅速。电动汽车作为一种交通工具,工作环境复杂多变,其电机驱动系统需要满足可靠性高、效率高、调速性能好、造价低等性能要求。因此电动汽车的电机驱动系统测试是一项重要研究内容。 电机驱动系统包括电机及其控制器,系统测试中需
[工业控制]
Ampleon为5G NR和4G LTE宏基站应用提供紧凑型多级Doherty MMIC驱动器
Ampleon为5G NR和4G LTE宏基站应用提供紧凑型多级Doherty MMIC驱动器,借此扩展无隔离器的6GHz以下产品线 荷兰奈梅亨 – 埃赋隆半导体(Ampleon)利用先进的LDMOS晶体管技术,推出了B11G3338N80D推挽式3级全集成Doherty射频晶体管——该晶体管是GEN11 Macro驱动器系列的载体产品,涵盖所有6GHz以下频段。这种高效的多频段器件覆盖3.3至3.8GHz的频率范围,可实现下一代大功率和具有市场领先效率的宏基站。 该驱动器产品系列采用PQFN 12×7mm²封装,集成了主路和辅路器件、输入功分器、输出功率合成器和每个部分的预匹配。器件的推挽式配置无需级间隔离器,集成的前置
[网络通信]
2016年上半年,LTE整合驱动智能手机应用处理器增长
Strategy Analytics手机元器件技术服务发布的最新报告《2016年Q2智能手机应用处理器市场份额:LTE 应用处理器驱动智能手机应用处理器增长》指出,全球智能手机应用处理器市场规模在2016年上半年同比增长3%,达到100亿美元。 Strategy Analytics的研究指出,2016年上半年,高通、联发科、苹果、三星LSI和展讯包揽了全球智能手机应用处理器市场的收益前五名。尽管竞争激烈,但高通依然表现出色,以39%的收益份额成为智能手机应用处理器市场的第一;联发科以23%的收益份额紧随其后;苹果以15%的收益份额排名第三。Strategy Analytics预计,2016年上半年64位应用处理器占智能手机应用处理器
[手机便携]
安森美半导体推出消费应用的高能效同步整流驱动器
安森美半导体(ON Semiconductor,美国纳斯达克上市代号:ONNN)扩充产品系列,配合下一代电源系统设计。NCP4303A和NCP4303B是全功能同步整流控制器及驱动器集成电路(IC),用于ATX电源、平板电视、大功率交流-直流(AC-DC)适配器和游戏机等应用中的开关电源(SMPS)。它们的独特特性为开关电源次级端整流提供高效及灵活的方案。
安森美半导体AC-DC电源转换产品业务部经理Christophe Warin说:“在提升电源能效方面,工程师们面临着比以前更大的压力。NCP4303产品系列提供独特的特性,如我们的专利MOSFET寄生电感补偿技术。这特性为优化同步整流系统能效提
[电源管理]
PT6312 VFD驱动原理与应用分析
PT6312原理与应用分析 硬件结构: VFD即真空荧光显示屏,其结构和原理可参考 单片机 音响技术网 -VFD应用指南资料,里面详细介绍了VFD的原理结构,应用等等。 VFD显示高贵华丽,常应用在DVD,高档的功率放大器,电磁炉,电冰箱等电器产品中用于用户操作显示。而与各种VFD显示配套的驱动常用PT6312,PT6311芯片,驱动芯片的硬件结构主要由扫描信号发生器、串行通信接口、控制模块、显示存储器、按键扫描值寄存器、通用输入寄存器、LED驱动器、VFD段/位驱动器等构成。本文着重讲述PT6312即VFD驱动的 单片机 编程应用。首先认识下PT6312连接VFD的电路原理框图如图1所示。 图(1) PT6311电路图 由
[单片机]
液晶驱动电路在智能电网系统中的应用
通用液晶驱动器可以应用在早期的电子计量式电表中,随着我国智能电网的发展,对液晶驱动电路也提出了新的应用要求。 通用液晶驱动电路主要是飞利浦的PCF8566和PCF8576,以PCF8576为例,该电路因为有级联功能,可以满足更多段位的显示驱动要求,正好可以用在电子计量式电表中作为显示驱动芯片。 通用显示驱动电路可以满足一般的段位显示的液晶驱动的要求,该显示方法较为简便。但是对于智能电网这样的工业级应用,有很多指标需要加强,主要包括:1. 整机的ESD水平要求达到15KV;2. 对上电模式和各种不同的输出要求较高;3. 符合绿色环保要求,电路功耗越低越好。 另外智能电网国网单相表的技术要求液晶显示段数在13
[电源管理]
 工业机器人应用基础 (张宪民 杨丽新 黄沿江)
工业机器人应用基础 (张宪民 杨丽新 黄沿江) 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章







更多热门文章
更多每日新闻
- PC产业驶入创新超车道,英特尔蓉城撬动AI新引擎
- 与产业聚力共赢,英特尔举行新质生产力技术生态大会
- “新”享5G-A万兆网络前沿体验 高通携手产业伙伴亮相第二届链博会
- 英飞凌推出符合ASIL-D标准的新型汽车制动系统和电动助力转向系统三相栅极驱动器 IC
- 南芯科技推出80V升降压转换器,持续深耕工业储能市场
- 法雷奥与罗姆联合开发新一代功率电子领域
- 贸泽电子开售能为电动汽车牵引逆变器提供可扩展性能的 英飞凌HybridPACK Drive G2模块
- 德州仪器新型 MCU 可实现边缘 AI 和先进的实时控制, 提高系统效率、安全性和可持续性
- 瑞萨推出高性能四核应用处理器, 增强工业以太网与多轴电机控制解决方案阵容
- 研华全新模块化电脑SOM-6833助力5G路测设备升级
更多往期活动
- 答题有礼: 寻觅可靠的触控、手势控制解决方案?快来认识新一代AVR DA单片机
- TI 工业知识挑战赛番外篇!
- KOL实战分享|无刷直流电机(BLDC)的驱动及控制方法
- 深入剖析恩智浦LPC1000处理器
- NXP微控制器电路板,针对USB Type C接口设计,评测创意有奖征集,晒心得更有多重好礼!
- 答题赢好礼|ADI技术直通车第1期
- 【最后1天】MPS 有奖倾诉|说出哪些年让你头大的电感应用问题,赢【颈部按摩仪、智能音箱】
- TI 工业月,灵感不设限!深度挖掘工业设计的痛点和难点,读专题填问卷赢好礼!
- 有奖直播:基于GaN 的高频(1.2MHz)高效率 1.6kW 高密度临界模式 (CrM) 图腾柱功率因数校正 (PFC)转换器的应用介绍
- 手机答题抽奖啦:Microchip高端千兆以太网专题知识
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号