一开始,所有实验都是在神舟板上去完成,根本就没有发现RTC的问题。直到我们自己画板来后调试时,才发现STM32 RTC的外部时钟源存在问题。
实际测试,RTC效果还行,然后配合上位机隔一定的时间后同步时间基本上能够满足要求。
关键字:STM32 RTC时钟源 LSE
引用地址:STM32 RTC时钟源LSE
这也算是STM32的一个鸡肋,对于LSE外部晶振太过于苛刻,手册上要求使用6pf,这个规格的晶振市场上太少,鱼龙混杂,中招的高手菜鸟不在少数。我们自己的板也是如此,几经波折,反反复复尝试使用不同的规格的晶振,替换外部的电容,电阻都没有能让这个32.768K的LSE起振。但是又需要有RTC来提供时间,考虑的方法主要有2种,第一采用外部RTC时钟芯片,如DS1302。第二是使用内部其它的时钟源来提供RTC时钟。毫无疑问,目前板已经制好,添加时钟芯片肯定造成板上布局更改,还得重新打板,这里采用了第二种方法。
查看STM32的手册上时钟树,如下:
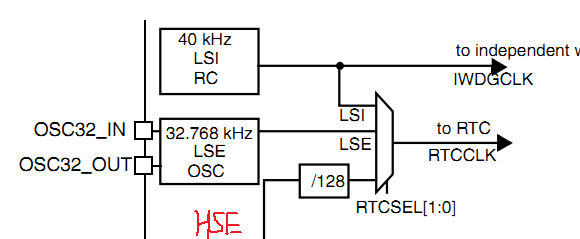
除去不能起振的外部低速LSE外,可供使用的只有LSI和HSE的128分频,LSI这个是内部的40KHz RC振荡器,频率在30~60KHz浮动,自然这个不能用于RTC计时,误差太大。
我们的板上配的是STM32F107这款芯片,外部高速晶振是25MHz的。128分频后频率为 25000000 / 128 = 195312.5 Hz,很显然这里也不能做到很精确,有小许误差。
然后设置RTC_PRL寄存器,写入195312这个分频值,便可以得到1Hz的频率。使用HSE作为RTC时钟,缺点就是无法在断开电源后使用后备电池进行供电,维持RTC的正常。下次需要上位机重新去设置时间。
代码大致如下:
- void RTC_Configuration(void)
- {
- u8 i = 0;
- /* Enable PWR and BKP clocks */
- /* PWR时钟(电源控制)与BKP时钟(RTC后备寄存器)使能 */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
- /* Allow access to BKP Domain */
- /*使能RTC和后备寄存器访问 */
- PWR_BackupAccessCmd(ENABLE);
- /* Reset Backup Domain */
- /* 将外设BKP的全部寄存器重设为缺省值 */
- BKP_DeInit();
- /* Enable LSE */
- /* 使能LSE(外部32.768KHz低速晶振)*/
- RCC_LSEConfig(RCC_LSE_ON);
- /* Wait till LSE is ready */
- /* 等待外部晶振震荡稳定输出 */
- TIM5_Init_Query(CALC_TYPE_MS); //ms 级别
- for (i = 0;i < 10;i++) //10次检测,如果LSE仍然没有起振,证明这玩意有问题,跳出循环
- {
- if (RCC_GetFlagStatus(RCC_FLAG_LSERDY) != RESET)
- break;
- TIM5_MS_CALC(1); //1ms延时
- }
- //while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET){}
- if (i == 10)
- {
- //RCC->CSR |= 0x1; //开启内部低速晶振
- //while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET);
- //RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI); //使用LSI提供RTC时钟
- //使用外部高速晶振 128分频
- RCC_RTCCLKConfig(RCC_RTCCLKSource_HSE_Div128);
- }else
- {
- /* Select LSE as RTC Clock Source */
- /*使用外部32.768KHz晶振作为RTC时钟 */
- RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
- }
- /* Enable RTC Clock */
- /* 使能 RTC 的时钟供给 */
- RCC_RTCCLKCmd(ENABLE);
- /* Wait for RTC registers synchronization */
- /*等待RTC寄存器同步 */
- RTC_WaitForSynchro();
- /* Wait until last write operation on RTC registers has finished */
- /* 等待上一次对RTC寄存器的写操作完成 */
- RTC_WaitForLastTask();
- /* Enable the RTC Second */
- /* 使能RTC的秒中断 */
- RTC_ITConfig(RTC_IT_SEC, ENABLE);
- /* Wait until last write operation on RTC registers has finished */
- /* 等待上一次对RTC寄存器的写操作完成 */
- RTC_WaitForLastTask();
- /* Set RTC prescaler: set RTC period to 1sec */
- /* 32.768KHz晶振预分频值是32767,如果对精度要求很高可以修改此分频值来校准晶振 */
- if (i != 10) //LSE不能正常
- RTC_SetPrescaler(32767); /* RTC period = RTCCLK/RTC_PR = (32.768 KHz)/(32767+1) */
- else
- RTC_SetPrescaler(195312); //25000000 / 128 = 195312.5,如果是8M / 128 = 62500,则这里应该填为62499
- /* Wait until last write operation on RTC registers has finished */
- /* 等待上一次对RTC寄存器的写操作完成 */
- RTC_WaitForLastTask();
- }
- void Init_RTC(void)
- {
- /* 以下if...else.... if判断系统时间是否已经设置,判断RTC后备寄存器1的值
- 是否为事先写入的0XA5A5,如果不是,则说明RTC是第一次上电,需要配置RTC,
- 提示用户通过串口更改系统时间,把实际时间转化为RTC计数值写入RTC寄存器,
- 并修改后备寄存器1的值为0XA5A5。
- else表示已经设置了系统时间,打印上次系统复位的原因,并使能RTC秒中断
- */
- if (BKP_ReadBackupRegister(BKP_DR1) != RTC_SEQ_ID)
- {
- /* Backup data register value is not correct or not yet programmed (when
- the first time the program is executed) */
- /* RTC Configuration */
- RTC_Configuration();
- /* Adjust time by values entred by the user on the hyperterminal */
- RTC_SetCounter(Time_Regulate(YEAR_BASE,01,01,0,0,0)); //2008-1-1 0:0:0
- /* 修改后备寄存器1的值为0XA5A5 */
- BKP_WriteBackupRegister(BKP_DR1, RTC_SEQ_ID);
- }else
- {
- /* Check if the Power On Reset flag is set */
- //RCC_GetFlagStatus(RCC_FLAG_PORRST) != RESET
- // printf("\r\n\n Power On Reset occurred....");
- /* Check if the Pin Reset flag is set */
- //else if (RCC_GetFlagStatus(RCC_FLAG_PINRST) != RESET)
- // printf("\r\n\n External Reset occurred....");
- if (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET)
- {
- //RCC->CSR |= 0x1; //开启内部低速晶振
- //while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET);
- //RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI); //使用LSI提供RTC时钟
- //RCC_RTCCLKConfig(RCC_RTCCLKSource_HSE_Div128);
- RTC_Configuration();
- }
- //printf("\r\n No need to configure RTC....");
- /* Wait for RTC registers synchronization */
- RTC_WaitForSynchro();
- /* Enable the RTC Second */
- RTC_ITConfig(RTC_IT_SEC, ENABLE);
- /* Wait until last write operation on RTC registers has finished */
- RTC_WaitForLastTask();
- }
- #ifdef RTCClockOutput_Enable
- /* Enable PWR and BKP clocks */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
- /* Allow access to BKP Domain */
- PWR_BackupAccessCmd(ENABLE);
- /* Disable the Tamper Pin */
- BKP_TamperPinCmd(DISABLE); /* To output RTCCLK/64 on Tamper pin, the tamper
- functionality must be disabled */
- /* Enable RTC Clock Output on Tamper Pin */
- BKP_RTCOutputConfig(BKP_RTCOutputSource_CalibClock);
- #endif
- /* Clear reset flags */
- RCC_ClearFlag();
- }
实际测试,RTC效果还行,然后配合上位机隔一定的时间后同步时间基本上能够满足要求。
万恶的LSE晶振,这东西简直不能忍受......
上一篇:stm32 ADC 非DMA方式
下一篇:用keil烧录stm32注意改地址
推荐阅读最新更新时间:2024-03-16 15:11
关于STM32串口的理解
总的来说,STM32单片机的串口还是很好理解的,编程也不算复杂。当然我更愿意希望其中断系统和51单片机一样的简单。 对于接收终端,就是RXNE了,这只在接收完成后才产生,在执行USART_ITConfig(USART1, USART_IT_RXNE, ENABLE)代码时不会进入ISR。但麻烦的就是发送有关的中断了:TXE或者TC,根据资料和测试的结果,TXE在复位后就是置1的,即在执行USART_ITConfig(USART1, USART_IT_TXE, ENABLE)后会立即产生中断请求。因此这造成一个麻烦的问题:如果没有真正的发送数据,TXE中断都会发生,而且没有休止,这将占用很大部分的C
[单片机]
STM32的窗口看门狗(WWDG)

一、窗口看门狗由从APB1时钟分频后得到时钟驱动。 通过可配置的时间窗口来检测应用程序非正常的过迟或过早操作。 窗口看门狗最适合那些要求看门狗在精确计时窗口起作用的程序。 二、什么是窗口看门狗? 窗口就是因为其喂狗时间是一个有上下限的范围内(窗口),你可以通过设定相关寄存器,设定其上限时间(下限固定)。喂狗的时间不能过早也不能过晚。 而独立看门狗限制喂狗时间在0-x内,x由相关寄存器决定。喂狗的时间不能过晚 三、窗口看门狗的好处 对于一般的看门狗,因为是在复位前的任意时刻刷新看门狗,但有可能程序跑乱了又跑回到正常的地方,或跑乱的程序正好执行了刷新看门狗操作,这样的情况下就检测不
[单片机]

基于STM32和CC2520的TinyOS移植方法
TinyOS系统以其组件结构模型、事件驱动、并发型等优点成为目前最受关注的无线传感器网络操作系统。但TinyOS不支持STM32和CC2 520芯片。因此在分析TinyOS基本原理、NesC编程语言实现机制及其编译过程的基础上,介绍了基于STM32和CC2520的TinyOS移植方法,完成了STM32的I/O组件、Timer组件、USART组件、SPI组件和CC2520芯片驱动的移植。在实现CC2520的基本通信功能基础上,实现简单MAC协议。最后测试了各组件的移植效果。实验测试结果表明,节点可以稳定可靠地通信。 无线传感器网络(Wireless Sensor Network,WSN)是一种应用相关的网络。需要对某些操
[单片机]
STM32开发板基础教程(七) - ADC with DMA
下面来讲一下STM32的ADC应用。 先闲扯一点其他事情,是我自己的理解。 STM32的优点在哪里? 除去宣传环节,细细分析。 STM32时钟不算快,72MHZ, 也不能扩展大容量的RAM FLASH, 同样没有DSP那样强大的指令集。 它的优势在哪里呢? ---就在快速采集数据,快速处理上。 ARM的特点就是方便。 这个快速采集,高性能的ADC就是一个很好的体现, 12位精度,最快1uS的转换速度,通常具备2个以上独立的ADC控制器, 这意味着, STM32可以同时对多个模拟量进行快速采集, 这个特性不是一般的MCU具有的。 以上高性能的ADC,配合相对比较块的指令集和一些特色的算法支持, 就构成了STM32在电机控制上的强大特
[单片机]
STM32之CAN详解
简介:bxCAN有3个主要的工作模式:初始化模式、正常模式和睡眠模式。 当bxCAN处于睡眠模式,软件必须对CAN_MCR寄存器的INRQ位置’1’并且同时对SLEEP位清’0’,才能进入初始化模式。 有2种方式可以唤醒(退出睡眠模式)bxCAN:通过软件对SLEEP位清’1’,或硬件检测到CAN总线的活动。 1 bxCAN工作模式 bxCAN有3个主要的工作模式:初始化模式、正常模式和睡眠模式。 在硬件复位后,bxCAN工作在睡眠模式以节省电能,同时CANTX引脚的内部上拉电阻被激活。软件通过对CAN_MCR寄存器的INRQ或SLEEP位 置’1’,可以请求bxCAN进入初始化或睡眠模式。一旦进入了初始化或睡眠模
[单片机]
STM32_EXIT中断
今天的软件工程下载地址(360云盘): https://yunpan.cn/cPhvyer3vIwXh 访问密码 57e1 STM32F10x的资料可以在我360云盘下载: https://yunpan.cn/crBUdUGdYKam2 访问密码 ca90 工程概要说明:定义一个按键(可自己定义),每按键一次,响应中断一次,在中断函数中LED提示灯变化一次,用户可更加实际情况在中断函数做出相应操作,这里只是一个模板。 关于“STM32F103 EXIT中断” 我把重要的几点在下面分别讲述,若不明白,请关注微信公众号“EmbeddDeveloper”查阅或留言。 一、RCC时钟配置 该函数位于在bsp.c
[单片机]
stm32的外设初始化步骤,以定时器为例。
我这个程序的目的在于让定时器开启更新中断,实现定时器1S中断一次然后在中断函数中LED电平翻转一次。 1.首先先开启这个外设的时钟:RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //开启定时器1 的时钟APB2 2.定义这个外设的初始化结构体:TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定时器模式初始化结构体 定义别名为TIM_TimeBaseInitStructure 3.把这个结构体内成员参数设置: TIM_TimeBaseInitStructure.TIM_Period = 999
[单片机]
ST 最新STM32 Primer开发工具可玩Maze和Breakout
完整、独立、预编程的评估工具套件,既有充满趣味性的功能介绍,又有严肃的开发工具,可以链接到在线开发社区 中国,2007年10月15日 — 意法半导体(纽约证券交易所代码:STM)今天推出了一套价格低廉的开发工具,这款代号为STM32 Primer开发工具是一套完整的学习与娱乐相结合的趣味性应用开发工具,用于ST的STM32系列基于具有突破性的ARM Cortex-M3内核的闪存微控制器。这套工具包含一个创新的用户界面、多个游戏和向新用户介绍该系列产品的产品入门功能,以及用于高级开发和编程的Raisonance软件工具。 STM32 Primer是一个手持评估开发工具,力图通过简单和有趣的介绍,让用户了解STM32的强大功能。紧
[单片机]
 基于STM32F411的无刷直流电机FOC控制系统设计
基于STM32F411的无刷直流电机FOC控制系统设计 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
- 下载资料有好礼:超凡富士通存储器FRAM,安全、易写入、低功耗
- EEWorld十五周年,感恩同行!盘点那些难忘的小确幸~
- 下载有礼|ADI 系统方案精选 (总辑)
- PI有奖问答之聚焦PI InnoSwitch-CH
- 学习Altera《SoC FPGA:体系结构重要吗?》文章,答题赢好礼!
- 下载有礼:数据中心养生秘籍《福禄克数据中心解决方案》等你带回家!
- 有奖调查|跟泰克一起了解【半导体材料与器件测试知识】(材料科学篇)
- 报名有礼| Arm Tech Symposia 年度技术大会报名开启!
- 直播已结束|浅谈Microchip的FPGA产品与智能嵌入式视觉解决方案
- VISHAY新能源主题月,幸运闯关赢大奖!
11月24日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号