对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有精度高、定位范围广和误差不随时间累积等优点,但其自主性差、易受外界遮挡和干扰、接收机数据更新频率低等缺点。因此工程上常常将两者互补结合使用,组成卫星/惯性组合导航系统。
本文以低功耗MSP430F149为核心,设计了能够同时实现卫星导航(GNSS)接收机、惯性测量单元(IMU)、气压高度等导航信息的高速采集与高速合路传输,并进行初步导航定位信息融合的导航系统,即可为室外移动机器人提供直接的导航服务,也可作为高精度组合导航系统的原始测量信息高速采集系统。系统设计的关键是利用单片机有限的接口资源实现了多传感器信息并行采集,设计了有效的数据同步方法,解决了气压传感器数据手册疏漏导致的无法接入问题,给出了机器人组合定位的基本方法。系统充分利用了MSP430F149单片机的能力,具有结构简单、低功耗、对传感器具有普适性等优点。
本系统由电源、气压计接口、IMU接口、GNSS接收机接口、SPI转UART模块及MSP430F149构成。系统组成如图1所示。组合导航系统的功能实现分为IMU数据接收与解析、GNSS数据接收与解析、气压计数据接收与解析、组合导航解算以及数据输出五个部分。IMU数据接收与解析功能用来获取导航解算中需要的加速度和角速度信息;GNSS数据接收与解析功能用来获取导航解算中需要的位置和速度信息(松耦合组合)或者 GNSS伪距和伪距率(紧耦合组合);气压计数据接收与解析功能用来获取高度信息;组合导航解算功能为系统核心,用来进行组合导航解算;数据的输出包括原始数据包的整合输出和解算结果的输出。
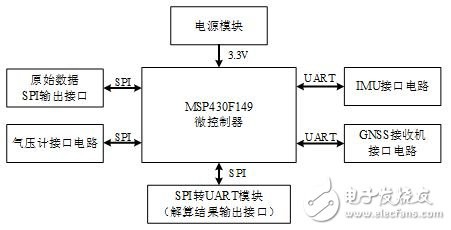
图1 系统组成结构图
本文所使用的惯性器件和GNSS接收机都是RS-232电平的UART接口,具有通用性,用户可根据成本考虑不同精度的设备。气压计选用美国MEAS公司生产的MS5803-02BA,已经固化在电路中。
微控制器接口
整个组合导航定位系统需要三个UART接口和两个SPI接口。其中两个UART接口由430单片机自带的UART资源提供,另外一个UART接口由 GPIO模拟SPI通过MAX3111E芯片转化得到;两个SPI接口由GPIO模拟得到。另外需要一个外部中断引脚捕获秒脉冲信号(PPS)、一个外部中断引脚捕获MAX3111E中断信号。MSP430F149管脚资源分配如表1所示。
电源电路
本系统供电需求为3.3V供电,因此采用AMS1117稳压芯片,接入5V电源即可输出3.3V稳定电压,可提供1A电流,满足系统供电需求。电路设计如图2所示。
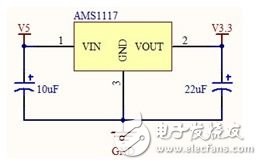
图2 电源电路
IMU器件及GNSS接收机接口电路
IMU器件及GNSS接收机都采用UART接口方式接入,采用RS232协议。因此可使用430单片机上自带的两个UART接口,但是需要进行TTL电平与RS232电平转换。这里采用常见的MAX3232芯片,电路设计如图3所示。
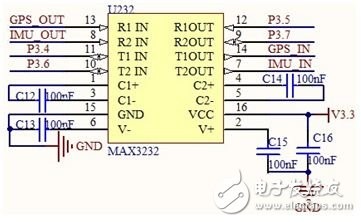
图3 IMU及GNSS接口电路
气压计MS5803-02BA接口电路
MS5803-02BA[3]是由MEAS公司生产的数字压力传感器,分辨率达10cm。芯片内部包含一个高线性的压力传感器和一个内部工厂标定系数的超低功耗24位ΔΣ型ADC。该款芯片有SPI和I2C两种接口方式,通过芯片的PS引脚配置了选择不同的接口方式(PS置低时,采用SPI工作模式;PS置高时,采用I2C工作模式)。本文所阐述的定位系统将气压计配置为SPI工作模式。MS5803-02BA与微控制器间的接口电路设计如图4所示。
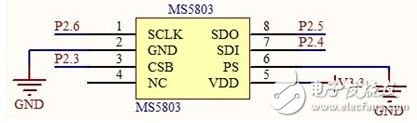
图4 MS5803-02BA接口电路
MS5803-02BA的控制命令包括复位命令、温度ADC命令、气压ADC命令、ADC读取命令、PROM读取命令。控制命令如表2所示。控制命令通过SDI口移位输入,响应结果从SDO移位输出。输入的电平判定在时钟信号的上升沿,输出的电平判定在时钟信号的下降沿。输出的气压值可以进行温度补偿,需要利用芯片内部PROM中的系数来补偿。ADC读取命令输入之后,输出24位ADC结果;PROM读取命令输入之后,输出16位补偿系数。
本文基于MSP430F149单片机设计的室外移动机器人组合导航定位系统,通过接口的扩展使得该款定位系统能够接入IMU、GNSS接收机、气压计三路信息,完成初步导航定位服务功能,同时可作为多路数据采集设备,将多路数据整合到一路高速输出接口,用于进一步的高精度导航解算。该系统根据使用者的需求不同,可接入不同成本和精度的设备,只要满足RS-232协议即可。笔者将其实际运用,整个系统充分利用该款单片机的资源,结构简单、功耗低、适用范围广,不仅可作为初步导航定位服务的设备,还可作为多路数据采集设备。
引用地址:
采用MSP430的机器人定位系统电路设计
推荐阅读最新更新时间:2024-03-16 15:16
弘扬教育机器人价值 能力风暴携手央视走进凉山
2018年3月7日20:00央视少儿频道推出《大手牵小手》学雷锋特别节目。本期节目能力风暴携手央视少儿一起走进四川凉山彝族自治州昭觉县三岔河乡中心校,为孩子们带来了酷炫的机器人舞蹈表演,带孩子们一起体验教育机器人。为了让喜欢教育机器人的孩子有机会继续学习,能力风暴还向学校赠送了价值10万元的教育机器人产品。 看到传说中的机器人翩翩起舞,孩子们高兴得欢呼起来。而更让孩子们兴奋的是,能力风暴的彭老师带着他们玩教育机器人。在老师的引导下,一个个造型和结构各异的机器人在孩子们的手里被创造出来,并通过编程动了起来。看着自己亲手创作的机器人,孩子们有满满的成就感。 据了解,教育机器人是指基于教育理论开发,用于教育的有丰富项目开发空间和实施
[机器人]
RoboMaster机甲大师赛:专属于理工男的性感与魅力
我大学选的是化学,本打算报物理的,之所以后来改,缘于一次化学实验课,很清楚的记得那天是做乙炔燃烧实验,我拿着抢了最大一根试管。下面就随手机便携小编一起来了解一下相关内容吧。 结果乙炔就倒多了,用火一点,噗,一条巨大火龙从试管口喷了出来。。。 别人是这样 我的是这样 当场就把老师吓得半死,我自己却开心的很,估计也就那时迷上了化学,现在想想当时真他妈惊险啊,有点后怕了。。。 然而我想说的是,特别后悔周末去了一趟深圳,从下午看到晚上的全国大学生机器人大赛。。 让我深深觉得生不逢时啊!!!我为什么这么好玩的东西没出现在我那个年代,为什么我妈那么快就把我生出来,时光能倒流的话,我特么怎么会因为个易燃气体而最后只记得做肥皂的
[手机便携]
海康机器人想拿下AMR市场,实力真的可以?
编辑:俊斐 近日,海康 机器人 移动机器人产品及方案发布会在线上盛大开幕。发布会以“超越行之所及,迈向价值共生”为主题,从“让机器更智能”、“让智能更普惠”两方面出发,重磅发布了海康机器人2023年在软硬件方面的精进与超越,在工业制造和商业流通领域的智能化升级应用,并通过长安汽车、一汽解放、中创新航、宏发、菜鸟、茶马古窖、新加坡YCH、马来西亚Alpro等不同行业案例生动展现了海康机器人的创新与变革,此举也代表海康机器人的智能化升级之路进一步展开。 近年来,海康机器人一直坚持聚焦工业制造和商业流通场景,以系列化硬件、全交付周期软件、创新的解决方案三管齐下促进数智升级,迈向价值共生。在过去一年的时间里,海康机器人累积成功交付了16
[机器人]
你真的懂扫地机器人吗?这些不为人知的小细节值得一看
扫地机器人在人们的家中可谓十分常见,虽说功能上大相径庭,扫地、拖地永远是它们的主打,但在设计上却有着许多不同,其中更是蕴藏了许多不为人知的巧思。今天,我们就以石头扫地机器人系列产品举例,来看看扫地机器人在设计上都有哪些不为人知的小细节。 ——便捷的快拆设计 对于扫地机器人这一清洁工具来说,使用一段时间后的清洁维护显得十分重要。石头扫地机器人的尘盒与主刷都采用了快拆设计,可以保证在需要时快速拆卸相关部件进行清洁。收集碎屑灰尘等杂物的尘盒,打开顶盖就可以取出,清理一下十分的方便。 刷头会与地面直接接触,上面自然也少不了会沾染一些灰尘和细菌,甚至会有头发等纤维缠绕其中,石头扫地机器人同样支持刷头部分的快拆,甚至可以对轴承部分进行清
[机器人]
分布式机器人将成为智能工厂的主要角色
很多人在谈论协作机器人cobots的时候,都会提到未来机器人将替代掉人类的工作,而较少人会讨论机器人与人将如何协作,提升工厂生产效率才是制造业发展的关键。 如果智能工厂继续引入协作机器和或让机器人承担越来越复杂的任务,那么,中央控制系统将会变得越来越大而且是低效率的。分布式机器人控制系统可以减轻负担,提升本地化设备运行效率,未来工厂中分布式机器人将会变得更多加重要。 分布式机器人目前正处于初始阶段,或许要经历很长一段时间的发展,但总有一天它会成为智能工厂乃至智慧城市的重要组成部份。分布式机器人是一项具有挑战性的工程,从AI的角度来说,工程师必需考虑机器人之间可以互相作用,机器人不是单独作业,需要对周边环境的变化作为反应
[机器人]
柔软灵活的机器人手指不仅能夹东西 而且还能吃
机器人给人的传统印象是金属、冰冷、充满侵略性,但这显然不是它们的全部形态。瑞士科研机构EPFL的科学家们认为,机器人也可以很柔软。是的,就是字面上的“软”。不仅如此,它们还可以被轻松地分解,并且不会污染环境。 最近IEEE网站发布了一篇“可食用动物明胶材质软体机器人”的论文,描述了未来机器人的一种新形态。这种机器人手臂是由动物明胶制成,柔软、充满探险但又不失灵活性,通过充气可以使其膨胀、固定形状,实现抓取等操作。 所谓的“动物明胶”,主要是由甘油和水构成,所以这种机器人即可食用又能轻松生物降解,不会对环境构成污染。这种属性让它可以做很多工作,比如被送至野外执行某种任务,然后自行分解;或是被设计成“诱饵机器人”,帮助人类捕获某种
[机器人]
推动智能机器人产业在张江科学城的发展
2020 X-MAN影响力峰会暨智能行业张江创新展昨天在上海张江开幕,吸引了100多位智能行业企业高管、20位产业代表企业负责人、200多位投资人参会。张江集团董事长袁涛与科沃斯集团董事长钱东奇签署战略合作协议,共同推动智能机器人产业在张江科学城的发展。 此次峰会由科沃斯蒲公英加速器联合张江Vπ孵化器主办,X-MAN是X划中学员的称号。X加速计划迄今已举办6期,共服务过130家人工智能、机器人等领域的创业、149位项目核心创始人。钱东奇表示:“如今,外部环境错综复杂,人工智能、机器人领域的创业者们要想突出重围,单打独斗肯定是不行的,要大胆地走向场景、融入生态。”科沃斯蒲公英加速器副总经理陈亮介绍,X-MAN校友之间的
[机器人]
基于单片机的微功耗中文人机界面设计
在现代便携式智能仪器或手持设备中,中文人机界面成为一种事实上的行业标准。能显示汉字的图形点阵液晶和可输入数字的小键盘已成为智能设备必不可少的组成部分。同时作为便携式设备基本要求的低功耗特性也贯穿于中文人机界面的设计始终。 这种低功耗中文人机交互界面需要设计者在选取MCU和具体元器件上有特殊考虑。微功耗、小体积应作为选择相关器件的首要要求。 设计中,笔者采用MSP430F149单片机作为系统的MCU,通过选择合适的液晶显示模块在3V电平构建了一个低功耗的中文人机界面。此中文人机界面构成了微功耗数据采集系统的重要组成部分。 一、MSP430系列FLASH型单片机的微功耗特点 德州仪器公司(TI)推出的MSP43
[单片机]






 机器人PLC控制及应用实例
机器人PLC控制及应用实例 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号