据不完全统计,我国每年因漏电而引起的触电事故、火灾造成数千人死亡和数十亿的经济损失,因此对可以防止漏电火灾及人身触电保护的漏电保护器的性能提出了更高的要求。本文介绍的漏电保护器动作特性自动测试系统,可测量漏电保护器的漏电动作电流值、分断时间和漏电不动作电流值,对提高漏电保护器工作的可靠性提供了主要技术参数,检测过程具有较高的自动化水平,可对在线运行与非在线运行的漏电保护器进行检测。
系统以LPC2132为核心,具有扩展测试电流的产生和调节模块、动作执行单元、电流检测电路以及键盘等外围设备。LPC2132是一个支持实时仿真和跟踪32位ARM7TDMI-S核的微控制器,1个10位8路A/D转换器,2个32位定时器/计数器,6路PWM单元输出,2个硬件I2C接口和47个 GPIO,2个16C550工业标准UART,以及多达9个边沿或电平触发的外部中断。16kB的片内静态RAM和64kB的片内Flash程序存储器避免了LPC2132外扩存储器,简化了电路,提高了运行速度。漏电保护器的动作特性自动测试系统结构框图如图1所示。
测试电流产生及调节模块
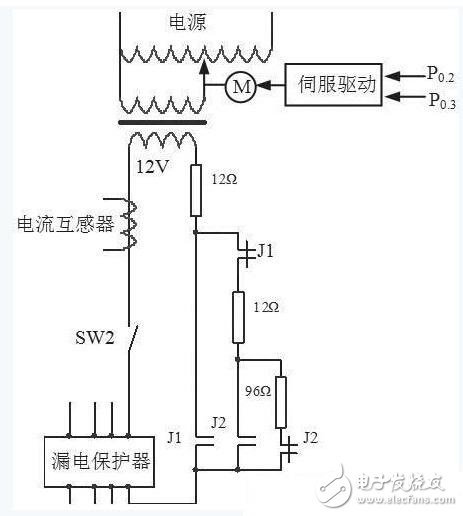
图2 测试电流产生及调节模块
测试电流产生和调节模块如图2所示。测试电流的产生是将50Hz、220V的正弦交流电经过220:12的降压变压器和电动调压器,输出0~12V的正弦交流电,再通过回路电阻,产生需要的测试电流。测试电流的产生分为3档,以满足不同的测量范围。继电器J1吸合,可产生0~1000mA的测试电流;继电器J2吸合,可产生0~500mA的测试电流;继电器J1、J2都不吸合,可产生0~100mA的测试电流。每一档测试电流的调节通过LPC2132控制电动调压器实现。为了使测试电流能均匀地变化,电动调压器采用了交流伺服控制。在测试过程中,LPC2132对采集到的实时回路中的测试电流值与设定值比较,并计算得到控制量,控制伺服电动机转动,带动电动调压器的电刷在副边上稳定地滑动,使副边电压变化,从而改变回路中的电流。LPC2132的P0.2 脚输出脉冲信号控制伺服电动机的运动速度,P0.3脚输出高或低的电平信号,控制伺服电动机转动的方向。
电流检测电路
电流检测电路如图3所示。通过电流互感器对测试电流进行采样,将电流互感器的二次侧输出信号经滤波、放大、电压提升等电路,变换为A/D模块可以采集的单极性电压信号(0~5V)后送入LPC2132.
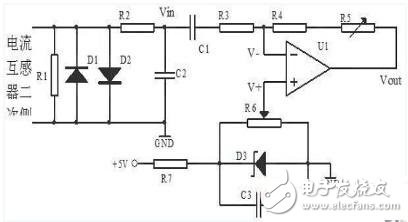
图3电流检测电路
在检测电流的大小时,根据测试电流的周期(工频)按照每个周期40个点进行采样,采样一个周期后,根据电流互感器的衰减倍数和提升电压的数值,通过软件算法计算出实际的电流有效值。电路应满足如下条件,当交流电流的瞬时值达到正向峰值时,放大器输出5V;当交流电流的瞬时值达到负向峰值时放大器输出 0V.3 A/D转换及控制电路
电流检测电路的输出信号VOUT送入LPC2132内置的8路10位高速A/D转换输入端,对漏电电流的大小进行检测。
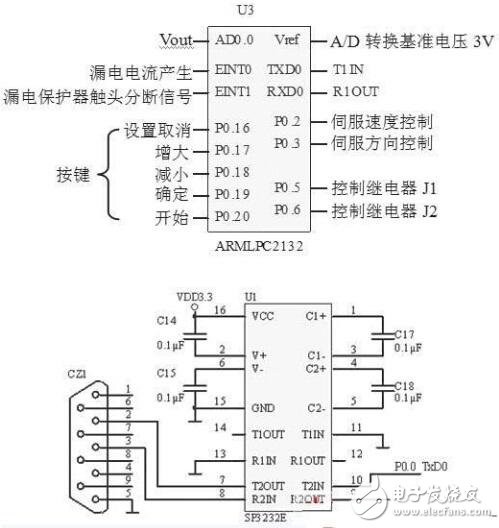
图4 A/D转换及控制电路
由于A/D转换为10位,当输入电压为5V时,输出数据值为1024(4FFH),因此最大分辨率为0.0049V(5V/1024)。若产生测试电流的回路电阻为12Ω时,漏电电流的分辨率为0.4mA(0.0049V/12Ω),完全满足测试需要。漏电保护器的漏电电流产生的开始信号和动、静触头断开信号分别送入LPC2132的外部中断输入端,采用中断的方式对漏电保护器动、静触头的分断时间进行检测。P0.5与P0.6脚分别控制继电器J1、J2的闭合和分断,选择三种不同测量范围的测试电流。LPC2132与上位机之间采用串行通信,由于系统是3.3V系统,所以要使用SP3232E进行RS- 232电平转换。SP3232E是3V工作电源的RS-232转换芯片。A/D转换及控制电路如图4所示。
引用地址:
PCB设计之单片机控制板设计原则
推荐阅读最新更新时间:2024-03-16 15:20
单片机IO相关
1、高阻态的输入端口悬空时,读出的值不确定。 2、双向IO模式时,一般是单片机内部有阻值较大的 上拉电阻 (当然也有开漏)。举例内部上拉,此时如果引脚悬空,由于内部上拉的存在,此时如果引脚写1,读出的将是高电平,如果写0,由于IO口的灌电流很大,会将引脚拉低,读出的是0。
[单片机]
C51单片机定时器/计数器中断功能详细分析(一)
我们首先需要了解什么是中断? 中断是指CPU在执行某一过程中由于外界原因必须暂停现在的事情,处理别的事情,处理完了再回去执行暂停的事情。 中断的优点? 1.分时操作。 2.实时响应 3.可靠性高 中断中用到的寄存器: 中断优先级寄存器IP IP寄存器: 作用是选择优先级的,解决中断优先级问题。 PX0:外部中断0优先级设定位 PT0:定时/计数器T0优先级设定位 PX1:外部中断0优先级设定位 PT1:定时/计数器T1优先级设定位 PS :串行口优先级设定位 PT2:定时/计数器T2优先级设定位 中断允许寄存器IE IE寄存器: EX0:外部中断0允许位; E
[单片机]

基于CC1100和P89LPC922微控制器实现无线传输测试系统的设计
引言 无线数据通信技术被越来越多地使用到嵌入式系统中,在简化布线的同时,也使数据交换变得更加便捷。本文介绍一种适用于远程计数无线传输的测试系统,该系统主要由德州仪器(TI)公司的CC1100射频收发器和飞利浦(Philips)公司的微处理器P89LPC922构成。 1 硬件设计 (1)总体方案设计 本设计由1个主机和1~32台终端从机组成。从机通过内部传感器计数后将数据以无线方式传送给主机,主机负责整个系统的调度、显示、配置。 (2)微控制器P89LPC922 P89LPC922芯片具有8 KB Flash程序存储器、1 KB可擦除扇区和64字节可擦除页,可擦除单个字节,指令执行时间只需2~4个时钟周期,指令执行速率6倍于标准
[单片机]
MSP430单片机在电源控制中的应用
MSP430系列单片机是美国TI公司生产的新一代16位单片机,是一种超低功耗的混合信号处理器(MixedSignal Processor),它具有低电压、超低功耗、强大的处理能力、系统工作稳定、丰富的片内外设、方便开发等优点,具有很高的性价比,在工程控制等领域有着极其广泛的应用范围。开关Boost稳压电源利用开关器件控制、无源磁性元件及电容元件的能量存储特性,从输入电压源获取分离的能量,暂时把能量以磁场的形式存储在电感器中,或以电场的形式存储在电容器中,然后将能量转换到负载。对DC—DC主回路采用Boost升压斩波电路。 2 系统结构和总设计方案 本开关稳压电源是以MSP430F449为主控制器件,它是TI公司生产的1
[单片机]
单片机定时器T0计秒C51程序+电路
原理图: c51单片机程序如下: #include reg51.h #define UCHAR unsigned char #define UINT unsigned int UCHAR table = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; UCHAR conter; UCHAR timer; void inittime(void) { timer=0; conter=0; TMOD=0X01; TH0=0X4C; TL0=0X00; EA=1;
[单片机]
Pebble智能手表采用STM32F205RE MCU
STM32F20x系列是基于工作频率高达120MHz的高性能ARM®Cortex™-M3 32位RISC内核。 该系列整合了高速嵌入式存储器,Flash存储器和系统SRAM的容量分别高达1M字节和128K字节,高达4K字节的后备SRAM,以及大量连至2条 APB总线、2条AHB总线和1个32位多AHB总线矩阵的增强型I/O与外设。 该系列产品还带有自适应实时存储器加速器(ART加速器™),在高达120MHz的CPU频率下,程序在Flash存储器中运行时,可以实现相当于零等待状态的运行性能。 已经利用CoreMark基准测试对该性能进行了验证。 所有产品均带有3个12位ADC模块、2个DAC模块、1个低功耗RTC、12个通用16
[单片机]
基于单片机自动巡线轮式机器人控制系统设计
1 引言 轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于51型单片机的自动巡线轮式机器人系统。 2 控制系统总体设计 机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。 3 主控制模块设计 3.1 CPLD设计 在机器人控制系统中.需要控制多个电动机和行程开关.还要进
[单片机]
基于C8051F060单片机和K9F2808UOC存储器实现数据采集系统的设计
从上个世纪九十年代起,电子技术在钻井井下得到应用。但井下钻具的振动会给很多传感器带来不利影响。 特别是对测量井下钻头姿态的惯性导航传感器影响巨大,在随钻振动环境中,如果对信号不作处理,根本就不能测量出正确的井斜角和方位角,也就无法实现井眼轨迹随钻控制的要求。本文介绍应用SoC芯片中的DMA技术对振动的高速采集和存储功能的实现方法,并给出了钻井环境中测试的结果。 1 方法的提出 传统的数据采集方法采用CPU直接控制的方式进行数据采集,数据传送需要经过CPU的中转才能存入存储器,传送速度慢且采集速率受到CPU的限制,极大影响了系统的采样频率,不能满足对振动信号高速采集的要求。而在DMA传送方式下,数据传送不经过CPU,由DMA
[单片机]




 单片机创新实践应用.
单片机创新实践应用. Pico W5500 EVB 搭建环境及ping网络
Pico W5500 EVB 搭建环境及ping网络 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号