吐槽一下MSP430需要明白的东西:
在430中,一个时钟周期 = MCLK晶振的倒数。如果MCLK是8M,则一个时钟周期为1/8us;
一个机器周期 = 一个时钟周期,即430每个动作都能完成一个基本操作;
一个指令周期 = 1~6个机器周期,具体根据具体指令而定。
另:指令长度,只是一个存储单位与时间没有必然关系。

MSP430根据型号的不同最多可以选择使用3个振荡器。我们可以根据需要选择合适的振荡频率,并可以在不需要时随时关闭振荡器,以节省功耗。这3个振荡器分别为:
(1)DCO 数控RC振荡器。它在芯片内部,不用时可以关闭。DCO的振荡频率会受周围环境温度和MSP430工作电压的影响,且同一型号的芯片所产生的频率也不相同。但DCO的调节功能可以改善它的性能,他的调节分为以下3个步骤
a:选择BCSCTL1.RSELx确定时钟的标称频率;
b:选择DCOCTL.DCOx在标称频率基础上分段粗调;
c:选择DCOCTL.MODx的值进行细调。
(2)LFXT1 接低频振荡器。典型为接32768HZ的时钟振荡器,此时振荡器不需要接负载电容。也可以接450KHZ~8MHZ的标准晶体振荡器,此时需要接负载电容。
(3)XT2 接450KHZ~8MHZ的标准晶体振荡器。此时需要接负载电容,不用时可以关闭。
低频振荡器主要用来降低能量消耗,如使用电池供电的系统,高频振荡器用来对事件做出快速反应或者供CPU进行大量运算。当然高端430还有锁频环(FLL)及FLL+等模块,但是初步不用考虑那么多。
MSP430的3种时钟信号:MCLK系统主时钟;SMCLK系统子时钟;ACLK辅助时钟。
(1)MCLK系统主时钟。除了CPU运算使用此时钟以外,外围模块也可以使用。MCLK可以选择任何一个振荡器所产生的时钟信号并进行1、2、4、8分频作为其信号源。
(2)SMCLK系统子时钟。供外围模块使用。并在使用前可以通过各模块的寄存器实现分频。SMCLK可以选择任何一个振荡器所产生的时钟信号并进行1、2、4、8分频作为其信号源。
(3)ACLK辅助时钟。供外围模块使用。并在使用前可以通过各模块的寄存器实现分频。但ACLK只能由LFXT1进行1、2、4、8分频作为信号源。
PUC复位后,MCLK和SMCLK的信号源为DCO,DCO的振荡频率默认为800KHZ。ACLK的信号源为LFXT1。
MSP430内部含有晶体振荡器失效监测电路,监测LFXT1(工作在高频模式)和XT2输出的时钟信号。当时钟信号丢失50us时,监测电路捕捉到振荡器失效。如果MCLK信号来自LFXT1或者XT2,那么MSP430自动把MCLK的信号切换为DCO,这样可以保证程序继续运行。但MSP430不对工作在低频模式的LFXT1进行监测。
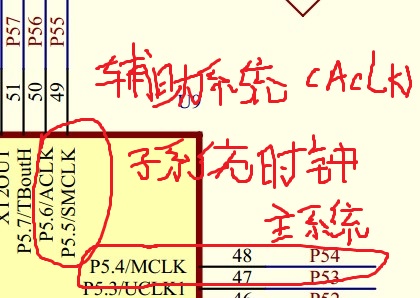
看图:有图可知,P5.4,P5.5,P5.6的第二功能可以对外输出时钟时钟
示例代码:
#include
void main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
DCOCTL = DCO0+DCO1+DCO2;//表示把三位全部置位为1,使内部的频率达到最大
BCSTL1 =RSEL0+RSEL1+RSEL2;//设置BCSCTL1
BCSCTL2 |=SELS;//设置BCSCTL2
P5DIR |=0x70;//设置P5.5,P5.6,P5.7的输入输出
P5SEL |=0x70;
while(1);
}
上一篇:MSP430F149流水灯闪烁以及数码管的显示
下一篇:430 flash的操作
推荐阅读最新更新时间:2024-03-16 15:29

 通信电子线路(第三版) (严国萍)
通信电子线路(第三版) (严国萍) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号