问题描述:
TQ2440的官方裸跑程序中,对SD卡先进行读操作,然后再写,发现不能程序卡死。倘若对SD卡先写后读,程序可以正常运行,奇哉怪哉?
写数据的关键代码-->
while(i < BlockSize)
{
//开始传递数据到缓冲区
status=rSDIFSTA; if((status&0x2000)==0x2000)
{ //如果发送FIFO可用,即FIFO未满
rSDIDAT = *TxBuffer;
TxBuffer++;
i++;
}
}调试与问题分析:
调试的时候发现,当不能在写的时候,FIFO available detect for Tx (TFDET)为0,也即是说是fifo满了。此时,程序循环了16次(i=0x10)。循环一次写入4个字节,16次刚好是fifo的最大容量64字节。这证明了,写入fifo中的数据,本应该发送给SD卡,腾空fifo以供用户继续写,却被搁置在fifo中,有进无出。就像下水道中转站被堵,上游的污水就不能继续排放一行的道理。
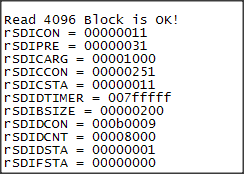
先写后读是可以正常工作的,我打印了执行写函数之后部分寄存器的值,如左图所示。可以发现写后的寄存器rSDIDCNT、rSDIDSTA都恢复到了初始值。右图是执行读函数之后寄存器的值,可以发现执行读函数之后,rSDIDCNT、rSDIDSTA都没有回到初始值,都仍然停留在读函数执行的状态中。也就是说,读函数没有执行彻底,SDMMC模块没有进入到空闲状态。在没有准备好的情况下,继续进行写操作,是不可能成功的。

修复
修复的方法主要是无论读操作,还是写操作,都确认SDIO总线空闲时,然后再才退出当前的函数。这样可以保证在随后的操作中,SDMMC模块处于准备好的状态,而非遗留状态。
读函数
/**********************************************************************************
功 能:该函数用于从SD卡中读出指定块起始地址的单个数据块
参 数:
U32 Addr 被读块的起始地址
U8* RxBuffer 用于接收读出数据的缓冲区
返回值:
0 读块操作不成功
1 读块操作成功
举 例:
在主调函数中定义一个数组作为接收缓冲区,如U8 Rx_buffer[BlockSize];
然后开始调用Read_One_Block(addr,Rx_buffer);
**********************************************************************************/
U8 Read_One_Block(U32 Addr,U8 * RxBuffer)
{
U16 i=0;
U32 status=0;
U16 BlockSize; //定义块大小
U16 BlockNumber;
BlockSize=1 << SDCard_BlockSize; //以byte为单位
BlockNumber = ((Addr >> SDCard_BlockSize) + 1) &0x0fff;
rSDIDTIMER=0x7fffff; // Set timeout count
rSDIBSIZE=0x200; // 512byte(128word)
rSDIFSTA=rSDIFSTA|(1<<16); // FIFO reset
rSDIDCON = (BlockNumber<<0)|(2<<12)|(1<<14)|(1<<16)|(1<<17)|(1<<19)|(0<<22);
while(CMD17(Addr)!=1) //发送读单个块指令
{
#ifdef __SD_MMC_DEBUG__
Uart_Printf("Send read addr failed!\n");
#endif
}
/* 开始接收数据到缓冲区 */
while(i { status = rSDIDSTA; if(status&0x60) //检查是否超时和CRC校验是否出错 { rSDIDSTA=(0x3<<0x5); //清除超时标志和CRC错误标志 #ifdef __SD_MMC_DEBUG__ Uart_Printf("there is wrong when reading: %s.\n",status&0x20 ? "time out" :"CRC error"); #endif return 0; } status=rSDIFSTA; if((status&0x1000)==0x1000) //如果接收FIFO中有数据 { *RxBuffer=rSDIDAT; RxBuffer++; i++; } status = rSDIDSTA; Delay(2); //延时2ms rSDIDCON=rSDIDCON&~(7<<12); //结束SDMMC模块的接收 rSDIDSTA = status; //清状态标志位 /* 确认SD卡进入了空闲状态--SDIO总线空闲 */ rSDIDCON=(0<<18)|(1<<17)|(1<<16)|(1<<14)|(1<<12)|(BlockNumber<<0); rSDIDTIMER=0x7fffff; status = rSDIDSTA; while( !( ((status&0x08)==0x08) | ((status&0x20)==0x20)| ((status&0x800)==0x800) )){ status=rSDIDSTA; } if( (status&0x20) == 0x20 ){ rSDIDSTA = status; return 0; } rSDIDSTA = status; return 1; } 写函数 /********************************************************************************** 功 能:该函数用于向SD卡的一个数据块写入数据 参 数: U32 Addr 被写块的起始地址 U8* TxBuffer 用于发送数据的缓冲区 返回值: 0 数据写入操作失败 1 数据写入操作成功 举 例: 在主调函数中定义一个数组作为发送缓冲区,如U8 Tx_buffer[BlockSize]; 然后开始调用Write_One_Block(addr,Tx_buffer); **********************************************************************************/ U8 Write_One_Block(U32 Addr,const U8 * TxBuffer) { U16 i = 0; U32 status = 0; U16 BlockSize; //定义块大小 U16 BlockNumber; BlockSize = 1<< SDCard_BlockSize; //以byte为单位 BlockNumber = ((Addr >> SDCard_BlockSize) +1) &0x0fff; rSDIDTIMER=0x7fffff; // Set timeout count rSDIBSIZE=0x200; // 512 byte(128 word) rSDIFSTA = rSDIFSTA|(1<<16); // FIFO reset rSDIDCON = BlockNumber|(3<<12)|(1<<14)|(1<<16)|(1<<17)|(1<<20)|(0<<22); while(CMD24(Addr)!=1) //发送写单块操作指令 { #ifdef __SD_MMC_DEBUG__ Uart_Printf("Send write addr failed!\n"); #endif } /* 开始传递数据到缓冲区 */ while(i < BlockSize) { status=rSDIFSTA; if((status&0x2000)==0x2000) //如果发送FIFO可用,即FIFO未满 { rSDIDAT = *TxBuffer; TxBuffer++; i++; } } status = rSDIDSTA; Delay(5); rSDIDCON=rSDIDCON&~(7<<12); //结束SDMMC模块的发送 rSDIDSTA = status; /* 确认SD卡进入了空闲状态--SDIO总线空闲 */ rSDIDCON=(0<<18)|(1<<17)|(1<<16)|(1<<14)|(1<<12)|(BlockNumber<<0); rSDIDTIMER=0x7fffff; // Set timeout count status = rSDIDSTA; while( !( ((status&0x08)==0x08) | ((status&0x20)==0x20)| ((status&0x800)==0x800) )){ status=rSDIDSTA; } if( (status&0x20) == 0x20 ){ rSDIDSTA = status; return 0; } rSDIDSTA = status; return 1; } 测试效果 以下操作都得到成功验证: 单块读 单块写 多块读(调用单块读函数实现) 多块写(调用单块写函数实现) 先读后写 先写后读 移植fatfs文件系统测试: 大多数操作没有故障出现,偶尔也会出现写函数卡死的情况 仍然存在的Bug 1、读函数在确认SDIO总线空闲时候,经常进入超时状态,这导致读函数的速度很慢。 2、移植fatfs文件系统测试,偶尔也会出现写函数卡死的情况。由于底层驱动运行缓慢,所以文件系统很卡。保存一张 482KB的bmp文件,耗费了十几秒种。
上一篇:TQ2440开发板网络配置方式
下一篇:STM32与S3C2440的区别
推荐阅读最新更新时间:2024-03-16 15:31

 开发板挂载SD卡
开发板挂载SD卡 数据采集系统源代码
数据采集系统源代码 MC9S12XS单片机原理及嵌入式系统开发
MC9S12XS单片机原理及嵌入式系统开发 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号