

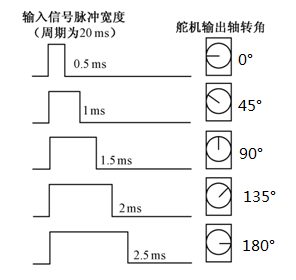
舵机如上图所示,左图为9g舵机,右图为55g舵机,与直流减速电机不同,它的工作方式是根据脉冲宽度转到对应的角度,转角范围是180度。PWM波控制信号的脉冲宽度对应的舵机转角如下图所示。
舵机有一个三线的接口。脉冲信号端连接橙色线(或者黄色线),+4.8V~+6V电源连接红线接,地线连接绿色线(或者棕色线)。
舵机可用作机械手、人形机器人、六足机器人、码垛机器人的执行元件。





一、库函数
1、打开DAHUME MINI.stw文件;
2、在STVD左侧Workspace窗口Source Files目录下找到main.c,双击打开;
3、编写如下代码;
#include "main.h"
void setup(void)
{
delay(10);
CLOCK(_16MHz);
PWM2_init(20, 20000);
//_asm("rim"); //rim为打开总中断,sim为关闭总中断
}
main()
{
setup();
while (1)
{
PWM2(1, 1000);
delay(1000);
PWM2(1, 1500);
delay(1000);
PWM2(1, 2000);
delay(1000);
PWM2(1, 1500);
delay(1000);
}
}
舵机与单片机必须分开供电(共地),因为在舵机工作时,5V电源电压会降低,影响单片机正常工作,比如掉电复位。
单片机改变脉冲宽度后,需要加一个合适的延时确保舵机有足够时间转到下一个角度。
二、练习
1、用舵机实现电风扇摇头功能,动作要顺滑;
2、用电位器控制舵机转角。
关键字:舵机 stm8 单片机 机器人
引用地址:
实验8 舵机
推荐阅读最新更新时间:2024-03-16 15:45
双端口RAM在单片机系统中的应用
1引言 在对产品可靠性要求高的系统中,往往需要硬件冗余。有些设备不仅要求其在各种恶劣的天气下工作,而且要求长期不间断工作。为提高可靠性往往采用双CPU系统。平时主单片机系统工作,并将所处理的数据存储在外存,一旦主CPU系统出现故障,副CPU可切换上来,并利用公共外存的数据继续工作,而不需要人工干预。这时双端口RAM做为外存就是两个CPU之间信息传递的最好渠道。本文以美国IDT公司生产的IDT7130为例,阐述双端口RAM在最常用的80C31双机系统中的应用。 2 系统的基本结构及硬件框图 如图1所示,整个系统由2个8031最小系统、双端口RAM、故障探测及切换系统、程序监控系统、I/O转换电路、键盘显示电路及外部受
[单片机]

51单片机——中断
一、中断的概念 CPU在处理某一事件A时,发生了另一事件B请求CPU迅速去处理(中断发生); CPU暂时中断当前的工作,转去处理事件B(中断响应和中断服务); 待CPU将事件B处理完毕后,再回到原来事件A被中断的地方继续处理事件A(中断返回),这一过程称为中断。 二、中断寄存器 单片机有10个寄存器主要与中断程序的书写控制有关 1.中断允许控制寄存器IE 2.定时器控制寄存器TCON 3.串口控制寄存器SCON 4.中断优先控制寄存器IP 5.定时器工作方式控制寄存器TMOD 6.定时器初值赋予寄存器(TH0/TH1,TL0/TL1) 中断结构 三、寄存器功
[单片机]
基于深度问答技术的机器人 让“知识不再改变命运”?
科学家正在让机器人变得无所不知,无所不能。深蓝计算机下棋战胜人类,工厂生产线上马机器人,军事战争中机器人的应用增加…这些似乎与人们的生活并无多大关系,基于软件和互联网的虚拟机器人则已经开始实实在在影响我们的生活。 Siri掀起以语音交互为核心的语音助手,用户可以通过它告诉手机dosomething。但如果要问知识类问题,它就没辙了。在“无所不知”上,百度小度机器人近日取得重大突破。 9月20日上午,小度机器人亮相全国科普日展览活动,得到了前来参观的中共中央政治局常委、中央书记处书记刘云山等领导的肯定,并在现场吸引了大量学生群体围观。而不久前在江苏卫视知识问答闯关节目《芝麻开门》中,小度机器人成为首个非人类挑战者,全部正
[机器人]
基于51单片机的智能雨刷设计
一.硬件方案 本设计运用雨滴传感器感应雨量的大小,把感应信号输给单片机系统,然后通过软件控制雨刷电机根据相应的环境做出不同的转动。 主要由51单片机最小系统+步进电机+1602显示+湿度传感器+ADC0832芯片+按键组成;如图: 二.设计功能 (1)采用lcd1602液晶显示雨水量值。 (2)雨滴传感器检测雨水量,adc0832对雨滴传感器信号ad转换数字信号单片机处理。 (3)有手动模式和自动模式控制两种,手动模式实现开关操作,还可以通过按键调整速度。自动模式下根据雨水量自动控制步进电机的速度,低于下限步进电机停止工作,上限和下限之间步进电机1档(慢速)工作,大于上限步进电机2档(快速)工作。 (4)四个按键:设置、加
[单片机]
沃尔玛启用货架机器人,工作效率高出人类50%
近日,沃尔玛在加利福尼亚的一些商店里启用了货架 机器人 ,该机器人每90秒扫描完一次货架,比人类的工作效率高出50%。 据了解,该货架机器人高6英尺,其身上带有一个信号发射塔,塔上装有摄像头。该摄像头用于扫描过道,检查库存并识别丢失和错放的物品、标错的价格和标签,然后机器人将收集的这些数据传给商店员工,员工会根据数据给货架补货或修正错误。 测试表明,该机器人能够以每秒7.9英寸(大约每小时0.45英里)的速度行进,每90秒扫描完一次货架。与人类的员工相比,其工作效率高出50%、可以更准确地扫描货架,而且其扫描速度也提高三倍。 对此,货架机器人的发明者Bossa Nova指出,该机器人的采集系统与自动驾驶汽车的系统非常相似,它是通
[嵌入式]
基于单片机的直流电能收集充电器的设计
近年来,能源短缺问题日益突出,人们在担忧能源枯竭的同时,对能源的浪费却大得惊人。例如各种废弃的电池,尤其是遥控玩具车使用的电池,甚至没用到其能量的一半就被废弃掉了,这不仅造成能源的浪费,更造成了环境的污染。因而研制一种收集各种废旧电池能量的装置已迫在眉睫。 本文设计一种以直流电源变换器为核心的电能收集装置,该装置可用于人们在旅途为手机随时充电,也可用于矿工照明等。该充电器可将直流电源的能量传递到3.6 V以上的可充电电池中。系统根据输入电压不同采用MC34063和HT7750来构建供电电路给电池充电,经过89C51单片机控制 AD0832来检测电源输出电压的大小,从而判断是否对电池进行充电,并且检测时间的长短可以根据用户
[单片机]
富士康与软银双方多次联手布局机器人
近期,日本初创机器人企业lexistence频频传出新消息。
7月6日,日本初创公司Telexistence官网发布消息,宣布其已于近期完成1.7亿美元的B轮融资 ,投资者包括HH-CTBC(富士康Co-GP)基金、软银、rbus Ventures、Monoful Venture Partne、KDDI Open Innovation Fund以及Globis Catal Partners。
高工机器人发现,这是继2018年(A轮,未披露)和2021年(A-2轮,2000万美元)披露的两次融资以来的第三笔融资,目前,Telexistence已累计获得超1.9亿美元融资。
本轮融资,Telexisten
[机器人]
基础模型能为机器人带来怎样的可能性?
基础模型 (Foundation Models) 已经在过去几年里重塑了自然语言处理 (NLP) 和 (CV) 研究的格局,那么基础模型能为带来怎样的可能性?这篇综述或许有你想要的答案。
机器人是一种拥有无尽可能性的技术,尤其是当搭配了技术时。近段时间创造了许多变革性应用的大模型有望成为机器人的智慧大脑,帮助机器人感知和理解这个世界并制定决策和进行规划。 近日,CMU 的 Yonatan Bisk 和 Google DeepMind 的夏斐(Fei Xia)领导的一个联合团队发布了一篇综述报告,介绍了基础模型在机器人领域的应用和发展情况。报告的 fit aurthor 是 CMU 的博士四年级学生胡亚飞(Yi Hu
[机器人]










 单片机创新实践应用.
单片机创新实践应用. 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练












 京公网安备 11010802033920号
京公网安备 11010802033920号