嵌入式系统是一个软件和硬件相结合的计算机系统。软件代码经编写、编译、汇编、链接,生成可执行文件,然后将可执行文件加载到嵌入式系统的ROM或flash中,通过嵌入式系统的MCU来控制、检测外部的装置。
软件的编辑需要文本编辑器,编译需要编译器,汇编需要汇编器,链接需要编译器,可执行文件需要软件工具来加载文件,同时软件还需要一些函数库,中间件等。为了使开发更便捷,简单,几乎所有的MCU芯片都会有对应的集成开发环境(IDE),该环境囊括了软件开发从编辑到可执行文件的所有工具,同时还包括常用的库,调试工具,在线调试工具链等。
STM32主流的集成开发环境有两种:IAR和MDK。我在这里不想讨论哪一种IDE好,谈论这个没有意义,就像你认为版主多优秀,但是版主依然单身;你认为这个人多蛋疼,他却有鲜花默默的陪伴在身边,所以没有好与不好,只有喜欢与不喜欢,适合与不适合。如果你是一名刚接触STM32的同学,我将发挥我媒婆的本色,为你分别介绍下这两款开发环境,看看有没有相中的,如果没有,我就无能为力,请你自己寻觅吧;如果你是一名老鸟,也许下面的介绍会让你移情别恋也说不定。
无论MDK还是IAR,功能都很强大,除非有些比较特殊需求之外,基本上都能满足日常的工作和学习。两者的区别这处,可能会主导我们比较倾向于选择哪一个。
1、MDK是keil公司的产品,keil公司的集成环境,我们学习的51单片机的开发环境就是keil C,所以上手很容易,IDE中的各个功能很容易找到,再加上大量的中文出版图书都使用了Keil,因此,其中文资料相当丰富,对于英语稍差的童鞋,绝对是一个不错的选择;IAR对于大多数网友们来说使用的并不多,所以需要一段时间的学习和适应,而且最近其更新的加密措施,原有的和谐程序无法使用了,对于初学者来说,造成了不少的麻烦。
2、 MDK的文本编辑与IAR的文本编辑,自我感觉都不怎么样,相对于Source Insight的文本,差的太远了(顺便吐槽)。即使最新版的两者开发环境在文本编辑器方面都做了改善,但bla~~ bla~~
3 、MDK的工程管理和平常用的VC,keil C,PIC等开发环境没有多大的区别,而IAR的工程管理文件,采用了层叠的技术,更容易理清代码的层次,方便工程管理,这事IAR的亮点。两者的文件管理视图如下:
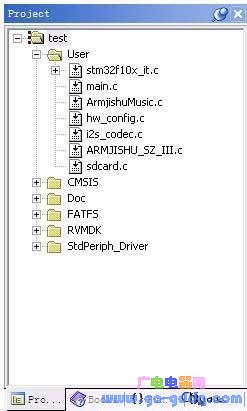
图1:MFDK开发环境 工程管理界面
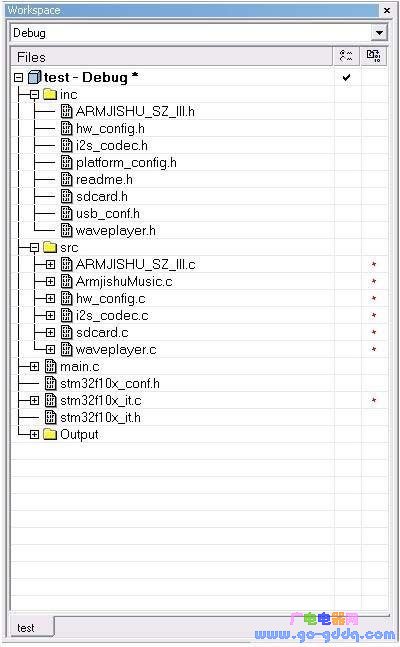
图2:IAR开发环境 工程管理界面
4、 MDK的默认工具栏工具多,方便查找;IAR的工具栏的工具比较少,看起来是干净整洁了,用到的时候就不太方便了。两者都支持外部工具链的调用。
5、 MDK的源程序的最后一行要是空行,否则就会有一个警告:warning: #1-D: last line of file ends without a newline,类似与unix的gCC的C语言规范;而IAR则不需要最后一行是空格。
6、 IAR有Eclipse 插件,可以使用Eclipse进行开发。
7、 IAR的优化效率较高,CODE-DATA代码区较小,而MDK的RW-DATA区较小。采用同一段程序,分别采用MDK和IAR开发环境,在不同的优化级别下,得到了如下的数据:
MDK 开发环境
| 优化级别 | CODE data memory | RO data memory | RW data memory | ZI-data memory |
0 | 2032 | 252 | 0 | 608 |
1 | 1888 | 252 | 0 | 608 |
2 | 1876 | 252 | 0 | 608 |
3 | 1872 | 252 | 0 | 608 |
IAR开发环境
| 优化级别 | CODE data memory | RO data memory | RW data memory |
| NONE | 2208 | 84 | 8708 |
| LOW | 2176 | 84 | 8708 |
| MEDIUM | 992 | 84 | 8708 |
| HIGH | 952 | 84 | 8708 |
无论使用哪种开发环境都应该将该环境熟练使用,对其配置参数、功能要理解透彻,对其提供的库函数要熟悉,对该编程环境支持的C或者C++代码的规范要深入理解。最后一句,两者的说明文档都是非常全面,英语好的话,千万不要差过。
关键字:STM32 集成开发环境 IDE
引用地址:
STM32:集成开发环境IDE
推荐阅读最新更新时间:2024-03-16 15:54
STM32之光敏电阻传感器模块的使用
本实验配合2.2寸TFT液晶屏显示,当光弱的时候显示“昏暗”,光强时显示“明亮”。 实验使用的是下图所示的3线光敏电阻传感器模块,用途:光线亮度检测,光线亮度传感器,智能小车寻光模块。模块特色:比较器输出,信号干净,波形好,驱动能力强,超过15mA;配可调电位器可调节检测光线亮度;输出形式 :数字开关量输出(0和1);使用宽电压LM393比较器。 模块使用说明1、光敏电阻模块对环境光线最敏感,一般用来检测周围环境的光线的亮度,触发单片机或继电器模块等;2、模块在环境光线亮度达不到设定阈值时,DO端输出高电平,当外界环境光线亮度超过设定阈值时,DO端输出低电平;3、DO输出端可以与单片机直接相连,通过单片机来检测高低电平,由此来检测
[单片机]

基于STM32的SDIO用4位总线24MHZDMA模式操作SHDC卡
发现网上很多所谓的SDIO操作SHDC无意例外都是官方的那个烂玩意,完全没有修改过,所以很多时候根本无法初始化SHDC,我也在网上看到很多人关于这部分的疑问,虽然STM32的SDIO的确是可以这样操作。但是很佩服那群人,什么都没改就发上来,把哥我害惨了。。。。 经过查资料,追踪,最后运气可佳。我发现自己的金士顿4GSD卡(class4)不能初始化跟用4位总线dma操作的原因。。各位也可以上网去找别人的试试,很多人都说不能用4位总线操作,而且用1位总线也只能是在低速率以及开启流控的情况下。而且经常出错。而4位总线总是提示没有检测到起始位。 但是他们都只会问,都没有去想象为什么,我也是。。但是后来发现。STM32的SDIO是完全没问题
[单片机]
STM32学习之时钟
STM32学习----时钟 收藏 在STM32中,有五个时钟源,为HSI、HSE、LSI、LSE、PLL。 ①、HSI是高速内部时钟,RC振荡器,频率为8MHz。 ②、HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHz。 ③、LSI是低速内部时钟,RC振荡器,频率为40kHz。 ④、LSE是低速外部时钟,接频率为32.768kHz的石英晶体。 ⑤、PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。 其中40kHz的LSI供独立看门狗IWDG使用,另外它还可以被选择为实时时钟
[单片机]
基于STM32智能门禁系统(阿里云)
1. 前言 随着社会进步,生活质量提高,尤其是网络技术和计算机越来越和我们的生活紧密联系,这给社会的信息化的安全带来了很多新挑战,有些简单身份识别方式,因其局限性逐渐暴露出其自身缺点,人们开始寻找更加安全性的身份识别方式,由于生物特征具有唯一性和确定性并能随身携带,简单易用等优点,用生物特征确认所有者信息一直是人们所注重的身份识别方式,尤其是近年来智能科技的飞速发展,人们慢慢得不再满足门锁、钥匙、门禁卡等手工安防设备,所以在人类社会发展过程中指纹识别技术应运产生。指纹识别技术具有很强的优势:指纹是人体的一大特点,人类指纹相同的概率几乎为零,等同于说指纹是每个人生来就有、无可替代的密码。因此我相信指纹识别技术一定前景广阔,深受用户喜
[单片机]
STM32 内存分配详解
1、KEIL 编译后数据 code RO-data RW-data ZI-data flash 实际存储数据 2、内存段 bss 段、data段、text段、堆(heap)和栈(stack)。 2.1、bss 段 bss 段(bss segment)通常是指用来存放程序中未初始化的全局变量的一块内存区域; bss 是英文Block Started by Symbol的简称; bss 段属于静态内存分配。 2.2、data 段 数据段(data segment)通常是指用来存放程序中已初始化的全局变量的一块内存区域; 数据段属于静态内存分配。 2.3、text 段 代码段(code s
[单片机]
一图搞懂单片机STM32的5个时钟源知识!
众所周知STM32有5个时钟源HSI、HSE、LSI、LSE、PLL,其实他只有四个,因为从上图中可以看到PLL都是由HSI或HSE提供的。 其中,高速时钟(HSE和HSI)提供给芯片主体的主时钟.低速时钟(LSE和LSI)只是提供给芯片中的RTC(实时时钟)及独立看门狗使用,图中可以看出高速时钟也可以提供给RTC。 内部时钟是在芯片内部RC振荡器产生的,起振较快,所以时钟在芯片刚上电的时候,默认使用内部高速时钟。而外部时钟信号是由外部的晶振输入的,在精度和稳定性上都有很大优势,所以上电之后我们再通过软件配置,转而采用外部时钟信号. 高速外部时钟(HSE):以外部晶振作时钟源,晶振频率可取范围为4~16MHz,我们
[单片机]
基于μC/OS-III及STM32的多功能控制器设计
电动轨道车控制系统一般分为多个子系统,子系统受一个主控器控制。这样的结构设计繁琐,编程复杂。采用μC/OS-III操作系统、STM32F103RC微控制器、12864液晶屏、PVC按键、无线串口模块、锂电池等实现具有人机界面、无线串口功能的总线主控器。该控制器具有人机界面、轨道车主控器、遥控接收器、遥控面板等多种功能,并且能在不同项目中使用。(※ μC/OS-III从官网上下载,文件名为Micrium_uC-Eval-STM32F107_uCOS-III,版本为V1.29.01.00。) 1 硬件结构 从系统接口看,该控制器具有显示、按键、无线收发、串口、485总线等接口,作遥控面板时用电池供电,内部具有电池和充电
[单片机]
STM32-cortex-M4串口调试
按说,串口调试应该是很简单的,可就偏偏困扰了我将近两个周的时间,一筹莫展,接收GPS模块发来的数据一直不对,今天早上通过GPS例程与我编写的简单程序一对比,发现USART3初始化不一致, 例程是uart_init(84,115200);usart3_init(42,38400); 而我的初始化是uart_init(84,115200);usart3_init(84,38400); USART1与USART3,前者挂在APB2总线(高速总线)下,最大时钟是84MHz,后者挂在APB1总线(低速总线)下最大时钟是42MHz。所以usart3_init初始化参数中设置为84是错误的,所以数据接收不正确。 所以时钟在ARM-微控制器
[单片机]

 【得捷电子Follow me第4期】任务源代码汇总
【得捷电子Follow me第4期】任务源代码汇总 嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版
嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号