亮度延迟线的选用、检测与代换
亮度延迟线开路或短路损坏后,电视机会出现图像色彩不透亮、亮暗层次不清或亮度失控、光栅变暗、对比度过浓等现象。
检测时,可通过测量亮度延迟线输入端与输出端之间的电阻值是否正常来判断其是否损坏。用万用表R×10 kΩ档测量亮度延迟线输入端与输出端之间的电阻值(正常值为30~40 Ω)。若测得阻值为无穷大,则表明该亮度延迟线内部已开路;若测得阻值接近,则说明该亮度延迟线内部短路损坏。
亮度延迟线损坏后,应选用同型号延迟线更换或性能相同的其他型号延迟线来代换。若无亮度延迟线更换,也可自制延迟线作应急修理。
制作的方法是:
取铝箔若干,制成5×10 mm 的长方形铝叠片,内夹一根多股芯线后引出,芯线要与铝箔接触好。用万能胶将铝片平粘在一根直径为80 mm、长120 mm 的塑料棒上,再在上面包裹一层聚酯薄膜(可用透明胶带)。用φ0.08 mm 的高强度漆包线在包有膜的塑料棒上密绕1100 T(匝),在塑料棒两端用树脂胶粘两根直径为1 mm、长10 mm 的铜线(也可用电烙铁将其加热烫入塑料棒两端内)作为引出线,将漆包线两端分别与两根引出线焊接好,作为亮度延迟线的输入端和输出端,与铝箔相接的多股芯线作为接地端,如图1 所示。在绕好的漆包线上再缠绕几层透明胶带即可。
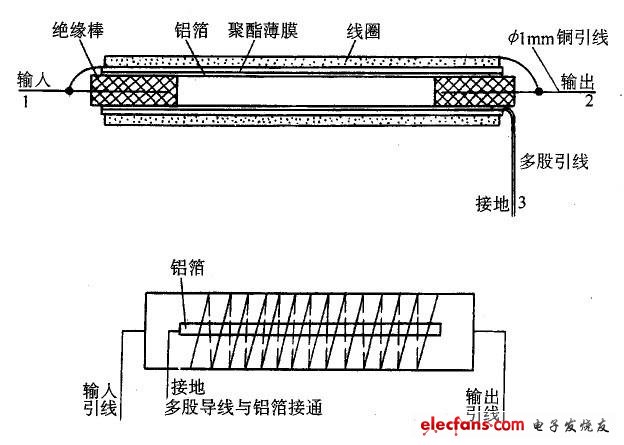
图1 自制延迟线的结构
色度延迟线的选用、检测与代换
色度延迟线开路或短路后,电视机会出现彩色“爬行”或彩色失真故障。
色度延迟线是否短路损坏,可通过“电阻测量法”来判断。用万用表R×10 kΩ档测量色度延迟线各引脚之间的电阻值,正常时均应为∞(无穷大)。若测得某两只引脚之间有一定的电阻值或阻值为0,则说明该延迟线已漏电或短路损坏。
亮度延迟线开路损坏,用万用表无法测出,只能用“元件代换法”来判断。
色度延迟线损坏后,应更换同规格、同型号的色度延迟线或用性能相近(例如相位延迟时间、中心频率等参数应相同)的其他型号色度延迟线代换。
关键字:亮度 色度延迟 检测
编辑:神话 引用地址:亮度与色度延迟线的选用、检测与代换
推荐阅读最新更新时间:2023-10-12 20:43
称重传感器的工作及其检测电路的原理
原理上称重传感器就是压力传感器,只是形状不一样而已,不过通常有很多种方法传感,但见得、用得比较多,如地磅用的那些,一般为电涡流式。 也就是说,他有一个电涡流触发绕组,然后还有一个传感器感应电涡流强度。由于这个称重传感器整体是金属封装,电涡流在其内部,受到压后形变,涡流就发生变化,放大后就可以读到数据了。然后,封装这个东西的材料,通常选用刚性材料, 总之,就是一般的金属,比如钢,但肯定不会用很软的东西的。因为即使是钢,就算受到压力形变那么几微米,那么电涡流的变化也足够感应出到底变化了多少而且如果是软金属,称很重东西的时候,可能很容易出问题。至少电涡流方式传感的压力传感器,是不会用软金属制造的。 称重传感器检测电路的功能是把电阻应变
[测试测量]
大型综合测量检测工具设计方案
本方案为国内汽车制造单位,汽车零部件尺寸测量,基于接触式测量及精密机械传动技术。 一. 测量原理 1.被检测零部件图纸
2.设计要求: 1、高精度尺寸:达到±0.023 2、接触点:基准测量点 3、检具要求:为在线生产全检使用 3.原理 采用两个顶尖,把工件顶起定位,另用一个测量头为钢球对工件进行检测,由百分表(或千分表)进行读数,另配一个标准件,其读数与标准件进行比较,即可得到测量值。测量头采用精密导轨滑动。 检测工具三维图例:
二. 应用领域 轨道交通、军工、航空航天、重工船舶、汽车制造、 机床 模具 、加工设备制造等装备制造业。
[测试测量]

Android 13将原生支持调整手机手电筒亮度
谷歌上个月推出了 Android 13 的第一个开发者预览版,带来了隐私功能、主题图标、语言控制等改进。此外,Android 13 还将支持一项与手电筒相关的功能,该功能已在 iPhone 上使用了一段时间。 根据 Esper 的 Mishaal Rahman 的说法,Android 13 为 CameraManager 类引入了两个新的 API: getTorchStrengthLevel:返回手电筒的当前亮度级别 turnOnTorchWithStrengthLevel:调整亮度级别,从最小值 1 到硬件确定的最大值 也就是说,Android 13 将可以让用户调整手机手电筒的亮度,并且开放了 API
[手机便携]
首尔半导体发表世界首例成功量产5倍亮度的 LED ‘nPola’
- LED之父中村修二教授参加新品发布会-
- 比原来亮度高出5倍的世界顶尖技术向世人公开
2012年7月3日,国际著名LED专业企业–首尔半导体(法人代表李贞勋 www.acrich.com)的LED新产品‘nPola’在钟路区小公洞Plaza酒店首次亮相,该产品采用了即将引领新一代照明市场的核心技术。
当天公开的新产品‘nPola’是首尔半导体开发了10多年拥有专利技术的产品,其特点是采用非极性(non-polar)技术,大大提高发光效率,相较于目前的LED,在相同面积上的亮度高出5倍。目前批量生产的LED发光效率是100流明左右,而此次首尔半导体公开的‘nPola’产品达到500流明,是目
[电源管理]
“吹毛求疵” 天准科技太阳能光伏硅片瑕疵的检测方案
在太阳能光伏面板产业中,对于硅片的瑕疵检测是生产过程中必不可少的一个环节,检测过程中,现场的质检员需要对硅片外观上的瑕疵进行甄别并做进一步处理,这些瑕疵有可能非常细小,且瑕疵类别较为复杂,另外瑕疵大小以及分布也是不可预知的,因此让质检员的工作变得复杂,也使得瑕疵检测难度偏大。 而除了人工检测,也有研究者开始利用机器视觉技术进行瑕疵检测,主流的硅片瑕疵检测算法需要根据产品特性,人为定义进行特征定义和建立模型,采用基于人工提取特征的机器视觉方法,通过工业相机采集产品图像,传入基于规则的检测方法来提取特征,最后输出检测结果。 但是这种传统的检测方法存在几方面问题:在检测算法开发过程中,需要投入大量的精力进行算法原型的设计与验证;产品更新
[手机便携]
用87C196实现快速无功电流检测方案
随着电力系统对电能质量要求的日益提高,影响电力系统电压稳定的无功功率及其补偿问题越来越受到重视。供电系统中已经有大量的无功补偿装置投入运行,这对电力系统的稳定起到了一定的作用。然而,在类似于轧钢等无功功率动态变化的工业场所,由于无功功率的大小不但随时间在不断变化,而且变化的速度很快。为了获取稳定电压,通常要求无功补偿装置能快速跟随无功电流变化,这无疑对无功电流检测的准确性和快速性提出了更高要求。本文提出了基于瞬时无功功率理论?1? 实现无功快速检测,并将检测算法在87C196KC单片机上实现的方法,试验证明,该方法具有较高的检测精度和较快的检测速度,是动态无功补偿装置的较佳检测方案。
1 系统的硬件结构
无功电流
[单片机]
频响高达2.5GHz的高精度真有效值功率检测器AD8361
摘要: AD8361是AD公司生产的高精度真有效值功率检测器,它采用了独特的双平方单元闭环比效转换电路技术,因而具有优良的性能。可用于2.5GHz高频范围的射频发射接收信号链的测试及CDMA、W-CDMA、QAM和其它一些复杂调制波形的测量。文中给出了详实的使用技术参数和各种典型的性能分析。
关键词: 有效值
功率 平方 AD8361
1 概述
AD8361是一个真有效值的功率检测器,可应用于高达2.5GHz的高频率范围的发射接收信号链的测试。采用单一电源,并能在2.7V~5.5V之间工作。在大多数应用中,只需一个电源退耦电容和输入耦合电容即可工作且输出呈线性响应(直流输出具有
[应用]
基于CAN总线的仿人机器人力信息检测系统
随着信息检测技术和控制技术的发展,仿人机器人运动控制已经从传统的离线规划方法研究转向基于环境信息的实时控制研究,仿人机器人的实时姿态调整与实时步态生成方法也成为运动控制的研究重点。对于步行机器人而言,其脚掌所受到的地面反力信息是最重要的外部环境信息之一,它尤其能够反映仿人机器人的姿态信息,在仿人机器人的实时姿态调整中具有重要作用。早在1989年,日本早稻田大学就在他们研制的两足步行机器人WL-12RⅢ中应用了六维力/力矩传感器,该传感器安装在机器人的小腿上,机器人可根据反馈力信息在不平整地面上进行稳定行走;日本HONDA公司的仿人机器人P2,P3以及ASIMO均安装了集成六维力/力矩传感器,利用传感器信息检测地面反力信息。
[工业控制]

 电气控制与S7-1200_PLC应用技术
电气控制与S7-1200_PLC应用技术 控制之美(卷1)——控制理论从传递函数到状态空间
控制之美(卷1)——控制理论从传递函数到状态空间









 京公网安备 11010802033920号
京公网安备 11010802033920号