第六部分:噪声测量实例
作者:德州仪器 (TI) 高级应用工程师 Art Kay
在第 5 部分我们介绍了不同类型的噪声测量设备。我们将在第 6 部分讨论与噪声测量相关的参数和操作模式。在这里我们将列举一些实际应用的例子,来说明如何使用该设备对第 3 部分及第 4 部分所描述的电路进行测量。
屏蔽:
测量固有噪声时,消除外来噪声源是很重要的。常见的外来噪声源有:电源线路“拾取”(“拾取”是指引入外来噪声,比如 60Hz 噪声)、监视器噪声、开关电源噪声以及无线通信噪声。通常利用屏蔽外壳将所测电路放置于其中。屏蔽外壳通常由铜、铁或铝制成,而重要的是屏蔽外壳应与系统接地相连。
一般来说,电源线缆和信号线缆是通过外壳上的小孔连接到屏蔽外壳内电路的。这些小孔尽可能地小,数量也要尽可能地少,这一点非常重要。实际上,解决好接缝、接合点以及小孔的(电磁)泄露,就可以实现较好的屏蔽效果。 [1]
图 6.1 举例显示了一种极易构建且非常有效的屏蔽外壳,该屏蔽外壳是采用钢漆罐制成的(这些材料可从绝大多数五金商店买到,而且价格也不高)。漆罐有紧密的接缝,并且罐盖的设计可以使我们方便地接触到所测电路。请注意,I/O 信号是采用屏蔽式同轴线缆进行连接的,该同轴线缆采用 BNC 插孔-插孔式连接器将其连接到所测试的电路;BNC 插孔-插孔式连接器壳体与漆罐进行电气连接。外壳唯一的泄露路径是将电源连接到所测电路的三个香蕉插头 (banana connector)。为了实现最佳的屏蔽效果,应确保漆罐密封紧固。
图 6.2 为测试用漆罐装配示意图


检测噪声底限
一个常见的噪声测量目标是测量低噪声系统或组件的输出噪声。通常的情况是,电路输出噪声太小,以至于绝大多数的标准测试设备都无法对其进行测量。通常,会在所测试电路与测试设备之间放一个低噪声升压放大器 (boost amplifier)(见图 6.3)。采用该种配置的关键是升压放大器的噪声底限要低于所测电路的输出噪声,从而使得所测电路噪声能在测量中反映出来。经验规则显示,升压放大器的噪声底限应比所测电路输出端的噪声小三倍。在下文中将给出该规则的理论解释。在进行噪声测量时,对噪声底限进行检测是特别重要的一个步骤。通常情况下,噪声底限是通过将增益模块或测量仪器的输入短路而测得的。第 5 部分详细阐述了不同类型设备的噪声底限测量。若不能检测出噪声底限,通常会导致错误的结果。


噪声底限说明
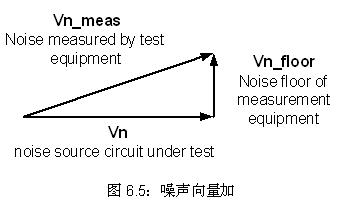
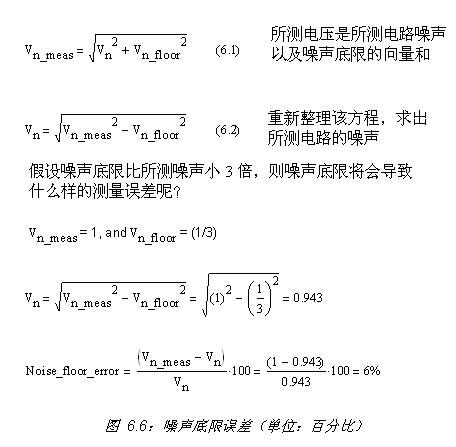
为获得最佳测量结果,测量系统的噪声底限相对于所测的噪声水平而言,应是可以忽略不计的。一个常用的经验规则是确保噪声底限至少比所测的噪声信号小三倍。图 6.5 显示了如何对所测电路的噪声输出和噪声底限进行矢量增加操作 (add as vector)。图 6.6显示了假设所测噪声比噪声底限大三倍的误差分析。使用该经验规则所得出的最大误差是 6%。若噪声底限比所测噪声小 10 倍,并进行同样的计算,则误差将为 0.5%。
使用真有效值 (RMS) 表对OPA627 示例电路进行测量
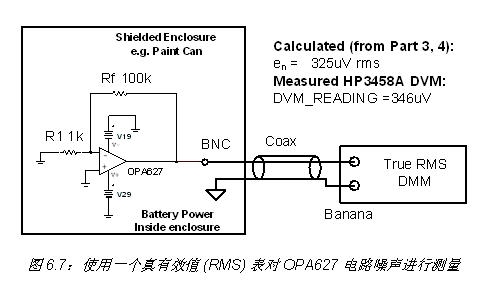
回忆一下在第 3 部分和第 4 部分我们分析了一款使用 OPA627 的非反相运算放大器电路。现在我们将阐述如何使用一个真有效值 (RMS) 表对该噪声进行测量。图 6.7 阐明了 OPA627 的测试配置。请注意,此测试配置的所测结果与第 3 部分和第 4 部分计算及模拟数值基本吻合(计算结果为 325uV,测量结果为 346uV)。图 6.8 说明了噪声测量的详细步骤。

使用示波器测量 OPA627 示例电路
图 6.9 显示了如何使用一个示波器对第 3 部分和第 4 部分的电路进行测量。使用时,观察示波器上的噪声波形并估计峰至峰数值。假设噪声是呈高斯分布(也称正态分布)的,则您可以将其除以 6,以获得 RMS 噪声的近似值(关于详细情况见第 1 部分)。所测的示波器近似输出为 2.4mVp-p,因此 RMS 噪声为 2.4mVp-p/6=400uV rms。这与第 3 部分和第 4 部分的计算和模拟数值相比,有很好的一致性。(计算值为 325uV,测量值为 400uV)。


测量 OPA227 的低频噪声
许多产品说明书都规定了从 0.1 Hz 到 10 Hz 的峰至峰噪声参数。这有效地给出了运算放大器的低频(也就是 1/f 噪声)概念。在一些情况下将以示波器波形形式给出;而在其它情况下,则以参数表形式列出。图 6.10 显示了一种测量从 0.1Hz 到 10Hz 噪声的有效方法。该电路采用了二阶 0.1Hz 高通与四阶 10Hz 低通串联滤波器,增益为 100。所测设备 (OPA227) 置于高增益配置(噪声增益=1001)下,因为预计 1/f 噪声很小,并且必须放大到可用标准测试设备进行测量的范围内。请注意,图 6.10 中电路的总增益为 100100(也就是 100x1001)。因此,输出信号应除以 100100 以将信号复原到输入。
图 6.11 中所示电路的所测输出如图 6.12 所示。图 6.12 为从 OPA227 产品说明书中截取的一张图表。所测结果的范围可除以总增益,以得出运算放大器的输入范围(也就是,5mV/100100 = 50nV)。请注意,实际产品说明书曲线与期望的产品说明书曲线有很好的一致性。


低频噪声测量中的失调温度漂移与 1/f 噪声的关系
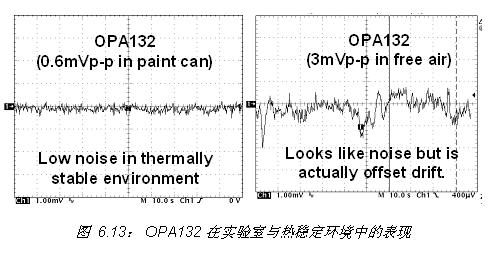
测量放大器 1/f 噪声的一个难题是:我们通常很难将 1/f 噪声与失调温度漂移分离开来。请注意,在典型的实验室环境下,周围环境温度会有 ±3C 的波动。设备周围的气流会造成失调电压的低频变化,与 1/f 噪声看上去很类似。图 6.12 比较了 OPA132 在热稳定环境下与在典型实验室环境下的输出。假设最坏情况下的运算放大器漂移,在典型实验室环境下,失调电压漂移将为 60uV 左右(根据产品说明书(10uV/C)(6C) = 60uV)。图 6.12 中的放大器增益为 100,因此输出漂移的近似值为 6mV(即 (60uV)(100) = 6mV)。
将失调电压漂移的效应从 1/f 噪声中分离开来的一种方法是将所测设备置入一个热稳定环境中。该环境必须在整个测量过程中,都保持设备的温度恒定(变化范围在 ±0.1C 内),并且也应尽可能减少温度梯度。实现该目的的一个简单方法是将电子惰性填充液注入到漆罐中,并在整个测试过程中都将设备浸在液体中。热传导氟化液通常可用于该类型的测试,因为它们的电阻很高,热阻抗也很高。并且,它们也是生物惰性材料,并且无毒性[2]。
测量 OPA627 的噪声频谱密度曲线
正如我们在本丛书中见到的,在噪声分析中频谱密度参数是一种特别重要的工具。尽管绝大多数的产品说明书都提供了该信息,但工程师有时也会进行实际测量,以验证公布的数据。图 6.14 中的电路显示了一种简单的测试结构,可以对电压噪声频谱密度进行测量。
请注意,用于本测量的频谱分析仪的带宽是从 0.064Hz 到 100kHz。这样的带宽范围可对许多放大器的 1/f 区和宽带区进行特征测量。此外,请注意频谱分析仪内部配置为直流耦合模式,而不是交流耦合模式,因为它的下限截止频率为 1Hz,1/f时的读数精度不高。然而,还是应将运算放大器电路与频谱分析仪进行交流耦合,因为相对噪声来说,直流失调电压很大。因此,运算放大器电路结合使用外部耦合电容 C1 和频谱分析仪的输入阻抗 R3 进行交流耦合。该电路的下限截止频率为 0.008Hz(这对我们的 1/f 测量不会造成干扰,因为频谱分析仪的最小频率为 0.064Hz)。请注意 C1 实际上是并联的多个陶瓷电容(不推荐在本应用中使用电解质电容和钽电容)。
图 6.14 中放大器配置的另一个考虑因素是反馈网络的值。第 3 部分中我们说过并联 R1 和 R2 (Req = R1||R2) 用于热噪声和偏置电流噪声的计算。该阻抗的数值应最小化,以使得所测噪声为运算放大器电压噪声(也就是说,偏置电流噪声和电阻热噪声的影响可忽略不计)。

在所有的噪声测量中,要检验频谱分析仪的噪声底限是否小于运算放大器电路。图 6.14 所示例子中,放大器的增益是 100,以将输出噪声提高到频谱分析仪的噪声底限之上。请谨记该配置会限制高频带宽(带宽=增益带宽乘积/增益=16MHz/100=160kHz),从而,噪声频谱密度曲线将在较低频率时呈现下降趋势。图 6.14 中的例子并不受这一问题的影响,因为高频下降趋势在频谱分析仪带宽之外产生(噪声频谱下降趋势出现在 160kHz,而频谱分析仪的最大带宽是 100kHz)。
图 6.15 显示了频谱分析仪的测量结果。请注意,数据是在数个不同的频率范围采集的(0.064 Hz 到 10 Hz,10 Hz 到 1 kHz,以及 1 kHz 到 100 kHz)。这是因为本例中的频谱分析仪使用了线性频率扫描对数据进行采集。例如,如果每隔 0.1Hz 采集一个数据点,则在低频时精度将太差,而在高频时精度又将超出要求。并且在宽泛的频率范围内使用低精度也要求特别多的数据点(比如,0.1Hz 的精度与 100kHz 的带宽要求 1x106 点)。另一方面,如果您对不同的频率使用不同的精度,则您可以在每个频率范围内均获得很好的精度,而不需要使用特别多的数据点。例如,从 0.064 Hz 到 10 Hz 的精度可设置为 0.01Hz,而从 1kHz 到 100kHz 的精度则可设置为 100Hz。
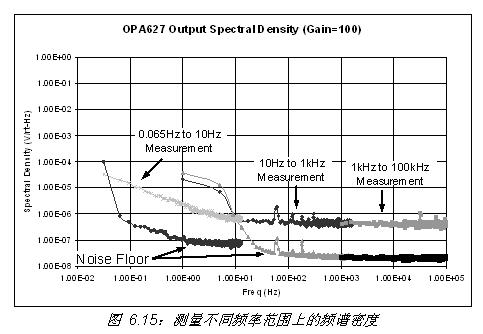
图 6.16 突出了在频谱分析仪测量结果中的常见异常。第一个异常是来自外部的噪声拾取。本例特别显示了 60Hz 以及 120Hz 时的噪声拾取。频谱分析仪的内部振荡器也会产生噪声。在理想的环境下,通过屏蔽,可以将噪声拾取降到最小。不过,实际中噪声拾取通常是不可避免的。关键问题在于要确定频谱中的噪声“脉冲”是不是由噪声拾取引起的,或者是确定其是不是设备固有噪声频谱密度的组成部分。
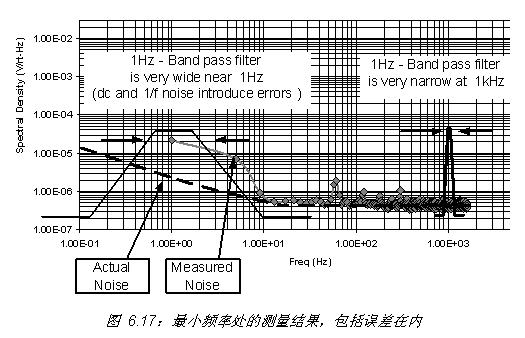
图 6.15 中所示的频谱密度曲线中的另一个常见异常是在给定测量频率范围内,最小频率处产生的相对较大的误差。为了更好地理解该误差,我们可以认为频谱测量是通过在整个频谱内扫描带通滤波器完成的。例如,假设频率范围是从 1Hz 到 1kHz,并且带通滤波器的分辨率带宽是 1Hz。在该频率范围内,带通滤波器的分辨率带宽在高频处相对较窄,而在低频处相对较宽。现在可以考虑带通滤波器的边缘在低频时从 1/f 噪声引入较大误差。图 6.17 图示了该误差。
理解不同的测量异常可以对误差进行矫正。比如,通过在几个频率范围上测量数据,并在频率范围低端去掉几个数据点,您可以得出更精确的结果。在我们的例子中,从 0.0625 Hz 到 10 Hz 的频率范围与 10 Hz 到 1 kHz 的频率范围交迭。(10Hz, 1kHz)频率范围包含了一些 10Hz 以下的错误数据,因此要去掉这些错误数据。在频谱密度测量中可以省略掉噪声拾取(比如,60Hz 的噪声),因为它不是运算放大器固有噪声的组成部分。
图 6.18 显示了本例所测量的噪声频谱密度曲线,去掉了异常读数。图 6.18 中的数据还要除以所测电路增益,以使频谱密度指示运算放大器输入。最后,对数据进行了平均。


将 OPA627 的频谱密度测量与产品说明书中的曲线进行比较,我们发现了一个有趣的结果。宽带噪声的测量结果和产品说明书中的参数非常吻合,但是 1/f 噪声测量则与参数有很大不同。事实上,1/f 噪声与参数的偏差并不令我们感到很意外。在本丛书的第 7 部分,我们将详细讨论这一问题。

总结和展望:
在本文中我们列举了几个不同的噪声测量例子。这些例子中所表明的方法可用于绝大多数的常规模拟电路。在第 7 部分中,我们将讨论与运算放大器内部设计相关的问题。理解运算放大器内部噪声的基本关系将有助于电路板以及系统层面的设计人员对绝大多数产品说明书中都未明确的噪声特征有很好的认识。特别是,我们将讨论在最坏情况下的噪声、噪声漂移,以及 CMOS 和 Bipolar 电路的区别。
感谢
特别感谢 TI 的技术人员,感谢他们在技术方面所提供的真知灼见。这些技术人员包括:
·高级模拟 IC 设计经理 Rod Burt
·设计工程经理 Jerry Doorenbos
·应用工程经理 Tim Green
·刚刚故去的 Mark R. Stitt
参考书目与信息
[1] 《电子系统的噪声抑制技术》,作者:Henry W. Ott ,第二版,由约翰威立父子出版公司 (John Wiley & Sons Inc.) 出版。
[2] http://www.solvaysolexis.com/
关于作者:
Arthur Kay 现任 TI 的高级应用工程师,负责传感器信号调节器件的支持工作。他于 1993 年毕业于乔治亚理工学院 (Georgia Institute of Technology),获电子工程硕士学位。他曾在 Burr-Brown 与 Northrop Grumman 公司担任过半导体测试工程师。
上一篇:单运放完成双滞后转换特性
下一篇:防止放大器输出出现过压的电路
推荐阅读最新更新时间:2023-10-12 20:13

- 热门资源推荐
- 热门放大器推荐
 电气控制与S7-1200_PLC应用技术
电气控制与S7-1200_PLC应用技术





- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况




 京公网安备 11010802033920号
京公网安备 11010802033920号