摘要:为提高倒车的安全性,提出了一种基于SOPC 技术的车辆电子后视镜系统,该系统具有后视摄像、双频超声波大范围测距、语音播报测距结果等功能。对系统中各硬件模块及其关键技术进行了详细的论述。
随着电子技术的发展,许多智能化技术被广泛应用到车辆上,车辆后视镜系统作为重要的安全辅助装置也经历了几代的技术发展[1]。目前车辆后视镜系统出现了两种新技术:后视摄像和倒车雷达。前者图像直观、真实,但无法给出精确的距离;后者能精确地测量距离,但对于车后方的水坑、凸出的钢筋等无法做出反映,因此存在安全上的死角[2][3]。车辆上的雷达测距有以下几种:激光测距、微波测距和超声波测距。前两者测量距离远、测量精度高,但成本很高;后者成本低,但测距范围通常小,在倒车速度稍快时安全性不佳。
本文提出了一种基于SOPC 技术的车辆电子后视镜系统,该系统可以实时显示车辆后方的图像,并利用双频超声波实现了10m 以上的大范围测距,同时该系统具有语音播报测量结果及报警等功能。
1 系统特点
本系统与其它电子倒车系统相比有以下特点:(1)采用40kHz 和25kHz 两种频率的超声波测距,既扩大了测量范围又能兼顾小范围测距时的测量精度。(2)采用3.5吋彩色液晶屏在实时、直观地显示车辆后方图像的同时,又可显示障碍物的距离及车辆相对于障碍物的速度等。(3)语音播报测距结果及报警。利用语音芯片ISD4002实现测距结果的语音播报,同时根据测量结果及车辆相对于障碍物的速度自动*估危险等级,并用急促程度不同的提示音示警。(4)采用SOPC实现系统设计,具有很好的灵活性。
2 硬件电路设计
2.1 系统硬件结构
车辆电子后视镜系统的电路框图如图1所示。整个系统可划分为图像采集及转换、图像及信息显示、超声波测距、语音播报及警告、温度测量等部分。 CMOS图像传感器OV6620将采集到的图像数据送到FPGA中,处理后得到RGB888格式的数据,经LCD控制电路送往LCD屏上显示。超声波测距电路共有左右两个通道,利用频率为40kHz和25kHz两种超声波脉冲测量障碍物的距离及车辆的相对速度,随后进行危险*估再将相关的信息显示在LCD 屏上,并播报距离测量结果,然后控制报警电路发出急促程度不同的警示音。

图1 系统硬件结构框图
2.2 主要功能模块的设计
2.2.1 图像采集及转换电路
图像采集及转换电路的框图如图2所示。图像传感器OV6620 输出的YCrCb4:2:2 格式的数据经解交织电路转换为YCrCb4:4:4 格式数据,送给色彩空间转换电路完成数据格式转换,然后存入缓冲RAM中。下面重点介绍色彩空间转换电路。

[page]
图像传感器OV6620输出的是YCrCb4:2:2 格式的数据,而设计中所使用的lcd屏要求输入RGB888格式的数据,因此需要色彩空间转换电路完成这种转换。转换公式如式(1)所示。

转换结果中的RGB都是8位无符号数,取值范围为0~255, 因此运算结果为负数的取0; 运算结果超过255 的取255。这样会引入误差,但对图像的显示影响并不大。利用VerilogHDL 完成该电路的设计, YCrCb取值分别为197 、 92、232 时, GRB输出(有延时)分别为186 、146 、255, 与根据(1) 式计算的结果一致。
2.2.2 超声波发射及接收部分
超声波测距中如果使用较高频率的超声波,则会因空气吸收较大而较快衰减,因此测量距离较短。比如采用40kHz 的超声波,测距范围一般不超过5m。由于空气对超声波的吸收与超声波频率的平方成正比,因此降低超声波的频率能增大测距范围。但是如果频率太低, 测距的绝对误差较大[4]。为了兼顾测距范围和精度,设计中采用40kHz 和25kHz 两种超声波测距。测量原理是:先输出10个40kHz 的超声波脉冲,再输出8个25kHz 的超声波脉冲,由于高频超声波先发出,对于同一目标,其回波先到达 CPU, 因此对于近距离的目标,首先用高频超声波探测,测量绝对误差较小;对于远处的目标, 由于高频超声波被空气吸收而大幅衰减, 所以回波只有低频超声波,此时测量绝对误差稍大,但因测距范围大因此仍可接受。接收到的超声波信号经放大、比较等处理后送给NiosII 的PIO 口,使PIO口产生中断,通过执行中断服务程序获取超声波传播时间,再根据测得的环境温度计算出障碍物的距离,由连续两次测量情况计算出相对速度。这里仅给出25kHz 超声波发射和接收电路,如图3所示。

2.2.3 LCD 显示控制电路
本设计中采用三星公司3.5 吋分辨率为320×240 的TFT 液晶屏(型号LTV350QV-F04), 设计中将显示屏分为两部分:上部16行用于显示测得的距离、速度、当前状态等信息,下部224 行显示车辆后方的图像。为了提高显示刷新速度、降低CPU占用率,LCD显示控制由硬件电路实 现,电路框图如图4所示。控制器利用OV6620 输出的行同步信号、场同步信号、像素时钟等信号产生控制LCD屏所需的控制信号;此外,该控制器包含一个行同步信号计数器及双口RAM地址发生器,两者都在每个场信号到来时清零,然后行计数器对行同步信号计数,当计数值在 16~240 之间时控制器将数据缓冲器中的图像数据送到LCD模块,当计数值在0~15之间时将双口RAM中的数据依次读出来送LCD屏显示。框图中的双口RAM对微控制器来说是只写的,在场信号到来并延迟一段时间后(大于LCD完成16行数据显示时间), NiosII 将测得的障碍物距离、速度等需要更新的显示数据写入双口RAM中;对LCD控制器来说,此双口RAM是只读的,并且是在每场开始的16行才读取数据,因此不会出现读写冲突的情况。这种设计大大减轻了NiosII 处理器的占用率,使得系统有足够的时间完成其它任务。
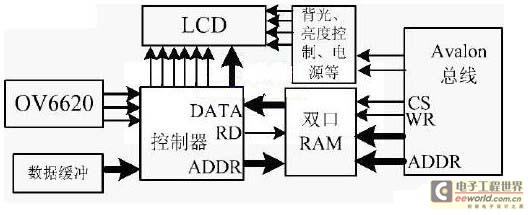
图4 LCD显示控制电路框图
[page]
2.2.4 语音播放及温度测量电路
语音播放电路主要由录放音电路ISD4002 、功放电路LM386等组成。NiosII通过I/O口模拟SPI时序实现对ISD4002 的控制,以中断的方式处理ISD4002 中各段的播放,从而实现语音的连续播放。温度测量电路主要由数字温度传感器LM75构成。
3 系统软件的设计
本系统的软件比较复杂,限于篇幅这里仅简要介绍其中的超声波测量模块。执行超声波测量模块时,首先统计测量次数,如果所有通道都已完成两次测量(由连续两次测量计算相对速度),则一个测量周期结束。在一个测量周期中,在每次测量前都读取时间戳定时器T0,由读取结果求出时间差进而求出相对速度。在发送超声波时先发送40kHz 的高频波,后发送25kHz 的低频波。如果在50ms 内没有接收到返回的超声波信号,则说明超出测距范围,进行下一通道的测距。
系统实现及测试
以Altera的DE2开发板为实验平台,利用该平台上两个通用I/O扩展槽外接实验电路板完成了本系统的设计验证。实验表明对于平面物体本系统超声波测距范围最小为7cm, 最大测量范围大于10m ,距离为2.5m以内时,测量误差不大于±1cm;语音提示清晰,LCD屏显示的图像清晰稳定。系统工作情况如图7所示,表示距障碍物(图5中车辆)距离为6.51m 、速度0.65m/s、当前处于曝光时间调节状态,速度是负值表示接近中。

图5 系统工作情况
结束语
本文利用SOPC 技术设计了一种车辆电子后视镜系统,该系统利用CMOS 图像传感器采集车辆后方的图像并实时显示在LCD 屏上,同时利用双频超声波实现了大范围、高精度的测距,使驾驶者及时、准确、全面地掌握车辆后方的情况,极大地提高了倒车的安全性。
本文作者创新点:将双频超声波测距应用到倒车雷达中,扩大了一般超声波倒车雷达的测距范围;并将后视摄像和超声波测距有机的结合起来,设计了一套较为完整的车辆电子后视镜系统。
上一篇:比亚迪全系列车型将采用迈同玻璃内置天线放大器芯片
下一篇:基于MM908E625的电动后视镜控制单元的设计
推荐阅读最新更新时间:2024-12-18 18:55

 基于FPGA的数字系统研究与设计
基于FPGA的数字系统研究与设计 2024_DigiKey_创意大赛_车载后方来车预警系统-作品视频
2024_DigiKey_创意大赛_车载后方来车预警系统-作品视频 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 AP358N
AP358N
Vishay线上图书馆

- CAV4201 350mA高效降压LED驱动电路的典型应用,适用于CTRL上的PWM
- LT1351 的典型应用 - 250 uA、3MHz、200V/us 运算放大器
- LTM8052IV 36Vin、12Vout 降压型 CVCC 转换器的典型应用
- ESP32 VGA控制器 可运行FABGL库
- LTC3823EUH 演示板,具有差分输出检测和跟踪功能的高效率、高功率降压转换器
- 用于 AV 接收器的 25 至 500W、2 通道、D 类音频功率放大器
- 【DIY设计】基于HLW8032电能计量系统
- OP297FSZ-REEL7平方根放大器典型应用
- AM1/4S-1205SH30Z 5V 0.25 瓦 DC/DC 转换器的典型应用
- LTC1261LIS8-4.5 1mV 纹波、5V 输入、-4V 输出 GaAs FET 偏置发生器的典型应用电路






- 芯启源(上海)将持续发力,“做深做精”EDA及IP产品
- 本田严厉警告日产:若与鸿海合作,那么本田与日产的合作将终止
- Microchip推出新款交钥匙电容式触摸控制器产品 MTCH2120
- Matter对AIoT的意义:连接AIoT设备开发人员指南
- 我国科学家建立生成式模型为医学AI训练提供技术支持
- Diodes 推出符合车用标准的电流分流监测器,通过高精度电压感测快速检测系统故障
- Power Integrations面向800V汽车应用推出新型宽爬电距离开关IC
- 打破台积电垄断!联电夺下高通先进封装订单
- Ampere 年度展望:2025年重塑IT格局的四大关键趋势
- 存储巨头铠侠正式挂牌上市:首日股价上涨超10%






 京公网安备 11010802033920号
京公网安备 11010802033920号