自适应前照灯系统(Adaptive Front-lighting Systern,AFS)是使近光灯光轴在水平方向上与转向盘转角联动进行左右转动,在垂直方向上与车高联动进行上下摆动的灯光随动系统。它使得近光灯的照射光线能转向车辆的前进方向,在夜间行驶时,前方的交叉路口、弯道处的可视性能得到提高,能够有效地降低驾驶员在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处的实际路况,进而有充分的时间来应付紧急情况,从而明显提升夜晚弯路上行车的安全性。
1 汽车灯光随动系统的工作原理
汽车灯光随动系统的工作原理如图1所示。汽车灯光随动系统共由四部分组成:

汽车在转弯时,重点是要提前看到所转方向的障碍物,根据现实驾驶的经验,车灯一般只需转过O~15°即可,只需要所转方向侧的那只前照灯实现智能转向就可,另一侧前照灯还是保持原来的方向。虽简化了控制,仍然能够达到预期的效果。
2 模糊控制系统的组成和实现过程
一个模糊控制系统必须包含一些必要的部件。模糊控制属于计算机数字控制的一种形式,它的组成类似于一般的数字控制系统,如图2所示。

模糊控制器的组成如图3所示,它主要包括输入量的模糊化、模糊推理和逆模糊化(或称模糊判决)三部分。模糊控制器的实现可由模糊控制通用芯片实现或由计算机(或微处理机)的程序来实现。
3 灯光随动系统模糊控制器设计原理
如图4所示:当汽车转过很小的角度时,其转动半径R近似地等于L和转动角度δ的比值,通过车速传感器的数据很容易计算出行驶的距离L,通过方向盘传感器检测到的信号也容易得出δ的值,这样就很容易求出转动半径R的值。而且,根据实际经验可知,灯的转向和汽车行驶的半径R的关系最大。因此,可根据R值的变化对汽车车灯的转向进行模糊控制。首先定义R,如果为正值,说明为逆时针转动,负值为顺时针转动;另外定义θ为正,说明为左边灯向左转动度数,负值为右边灯向右转动度数。

4 汽车灯光随动系统仿真及结果
本系统的模糊设计器采用Matlab模糊工具箱设计模糊控制器。
在Madab中键入FUZZY,进入模糊逻辑编辑窗口FIS Editor,如图5所示。可以对输入和输出的隶属函数进行编辑。

[page]
如图6所示,R的论域为[0,1],有三个语言变量,三角形隶属度函数。
如图7所示,△R的论域为[0,1],有一个语言变量,三角形隶属度函数。
如图8所示,输出θ的论域为[O,1],有三个语言变量,三角形隶属度函数。
在Rulers Editor窗口中输入控制前照灯转向的3条模糊控制规则:

5 仿真结果与分析
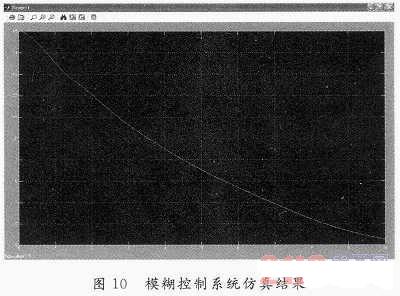
为了准确建立系统模型和进行仿真分析,通常的工业过程可以等效成二阶系统,不失一般性,取G(s)=作为汽车灯光随动系统的模型。在Matlab中建立的模糊控制系统模型如图9所示,基于实际经验以及量化因子和比例因子的选取规则,经过仔细选择,取K1=0.0 5,K2=0.25,K3=1,仿真结果如图10所示。

本文中,由于汽车的顺时针和逆时针的转向时的控制道理相同,故只对逆时针转向进行仿真。通过仿真结果可以看出,基本符合预期,在汽车转弯半径小时,前照灯的转向角度大,在转弯半径大时,前照灯的转弯角度小,而半径的变化率△R对前照灯转动角度影响小些,△R增大,前照灯的转过角度较小。
通过仿真可以看出,基于模糊控制的汽车灯光随动系统具有良好的动态性能,能够提高汽车夜间行驶的安全性。
6 结语
(1)分析了模糊控制理论及模糊控制技术,进行汽车灯光随动系统设计,并根据汽车转弯行驶时的实际路况找出两个关键可控参数,即汽车行驶速度和方向盘转角,把这两个控制参数通过模糊控制方法转为对汽车行驶半径一个变量的控制,使控制结构简化,以达到较好的控制效果。
(2)用Matlab软件对模糊控制系统进行了仿真,仿真结果表明设计的合理性和方案的可行性。
通过仿真可以观察到,基于模糊控制的灯光随动系统可以实现汽车前照灯的智能转弯,能使汽车夜间行驶的安全性大大提高,降低了驾驶员的劳动强度,且结构设计简单、实时性强、可靠性高、易于实现。
上一篇:下一代智能汽车将是Telematics与ECU的结合
下一篇:汽车前照灯CAN总线多路传输系统的研究与设计
推荐阅读最新更新时间:2024-12-18 19:02

 机器人学基础
机器人学基础 基于MATLAB的新能源汽车仿真实例
基于MATLAB的新能源汽车仿真实例 【Follow me第二季第4期】任务代码资料汇总
【Follow me第二季第4期】任务代码资料汇总 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 AP358N
AP358N
Vishay线上图书馆

- 用于 ADSL 调制解调器的 ±15V 模拟放大
- LTC7812EUH 宽输入范围至 12V/8A 低 IQ、级联升压+降压稳压器(VMID 升压至 14V)的典型应用电路
- 使用具有 B 类 EMI 滤波(单输出)的 RP10-4812DA DC/DC 转换器的典型应用
- LT6654AHLS8-2.5、16 位 ADC 电压基准的典型应用
- STEVAL-ISA109V2,基于 STBB2、800mA、3MHz、可调输出、高效双模降压-升压 DC-DC 转换器的演示板
- LTC3877IUK 4 相、120A VID 控制转换器的典型应用电路
- ADR434A 4.096 Vout 超低噪声 XFET 电压基准的典型应用,具有灌电流和拉电流能力
- LT1933IDCB 3.3V降压转换器典型应用电路
- 使用 Analog Devices 的 LT1509 的参考设计
- STEVAL-ISA125V1、5 V/10 W、60 kHz 隔离反激式,具有基于 VIPer28L 的额外电源管理演示板












 京公网安备 11010802033920号
京公网安备 11010802033920号