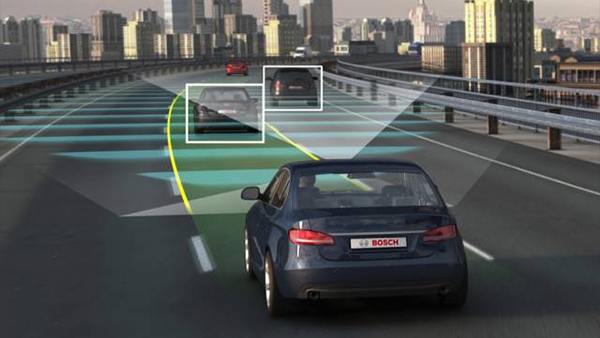
高度自动化车辆 (HAV) 的最重要的属性之一是它的视觉能力。沿着车辆周边分布的多个计算机视觉传感器是使 HAV 感知周围环境的因素。这种意识是做出决定的基础,无论是改变车辆的行程还是通知人类驾驶员避免潜在的危险。您可以在本 TED 谈话中看到车辆“如何”看到的完整解释。
有两种不同的方法来管理这些大量传感器:边缘处理和集中式处理。在边缘处理中,每个传感器是“智能传感器”,这意味着它将感官数据输入转换成相关信息并触发反应。在集中处理中,每个传感器是“无声的”,这意味着它收集原始数据而不进行任何处理,并将其发送到中央单元,进行所有的处理和决策。
用于无人驾驶汽车的 AI 超级计算机
集中式处理是自动无人驾驶车辆的一个很好的解决方案。它需要整个车辆有一个非常聪明的“大脑”,接收所有的感官输入。然后将其编译在一起,并使用传感器融合和深度学习算法来处理数据,以评估当前的情况。然后它执行适当的动作(转向、加速、停车、发射信号等)。除了来自传感器的输入,该“大脑”还可以通过车对车通信从其他车辆或智能基础设施和其他车辆接收数据,以选择最佳行动方案。
即便如此,要知道,无人驾驶车辆并未大规模生产。上路的大多数汽车包含一定水平的自动化,但不是完全无人驾驶。正如我在最近一篇关于全自动车辆面临的挑战的文章中所介绍的,有四种类型的自动化,从无自动化(1 级)到全自动(4 级)。目前,市场主要由 2 级和 3 级,所以集中式处理可能不适合大多数车辆。
集中式处理方法的主要缺点是,它需要一个非常强大的处理器来接收所有的数据,并基于所有的输入来做出一个决定。嵌入式系统面临一些非常严峻的挑战。由于极其严格的时序和安全限制,利用云进行处理并不可行。所有这一切使得集中式解决方案非常昂贵且能耗很高。这意味着在不久的将来可能不会有很多私人拥有的无人驾驶车辆。对于车主而言,高端豪华车和共享车辆的车队/汽车将受益于其优势,至少在前几代是这样。因此,集中式处理在多年内应该不会大量出货。
用于 ADAS 和大众市场自动化功能的智能传感器
另一方面,边缘处理已经可用,并且正在加速高级驾驶辅助系统 (ADAS) 和 HAV 的进步。在边缘处理中,正如我所说的,每个模块都实现智能化,这意味着它可以使用传感器融合、深度学习和其他算法来处理输入数据。这些智能传感器可以“看到”周围环境,并且不依赖于大功耗的中央处理单元。与处理来自所有车辆的传感器的输入的集中式计算单元相比,智能传感器极其省电。
智能传感器的主要优点是解决方案的可扩展性。在单独的单元中单独实施每项功能,显著降低了引入几个 ADAS 功能的成本。这就是为什么它是几乎所有 HAV 的当前解决方案的原因。这也是自动化功能特别是安全功能可用于经济型车辆以及豪华车辆的原因。
底线:边缘处理适合当下;集中式处理适合未来
把这些优点和缺点放在一起,看起来更常见的解决方案是边缘处理,并且将至少在未来几年内持续。集中式处理具有显著的优点,但是该技术需要时间来满足大规模市场预算约束。无论哪种方式,两种方案都可以适应一些非常特殊的使用情形,并将车辆自动化推进到更高水平。了解这些变化如何在未来几年的道路上发挥作用将非常具有吸引力。
CEVA 的深度学习和智能视觉平台基于 CEVA-XM6 视觉处理器,是汽车计算机视觉的一个极好的解决方案。它可以量身定制,以处理最先进的深度学习算法,同时使用功率极低。由于其灵活且可扩展的设计,它同时适合边缘计算和集中式计算。
上一篇:华为秘密测试无人车,涉足造车基本无悬念
下一篇:无人驾驶的前戏──ADAS
 Electric Motor Control: DC, AC, and BLDC Motors
Electric Motor Control: DC, AC, and BLDC Motors TC52N4935ECTRT
TC52N4935ECTRT














 京公网安备 11010802033920号
京公网安备 11010802033920号