在智能驾驶传感器领域,和激光雷达(LiDAR)相比,毫米波雷达(Millimeter-Wave Radar)更接地气,在技术上已非常成熟,而且其市场出货量相当可观,以中国市场为例,2015年车载毫米波雷达销量为180万颗,大概平均每12台车搭载1颗毫米波雷达。此外,毫米波雷达在欧洲的普及率非常高。
一、毫米波频段的划分
毫米波实质上就是电磁波。毫米波的频段比较特殊,其频率高于无线电,低于可见光和红外线,频率大致范围是10GHz—200GHz。毫米波介于微波(Micro waves)和THz(1000GHz)之间,可以说是微波的一个子集。
在这个频段,毫米波相关的特性使其非常适合应用于车载领域。目前,比较常见的车载领域的毫米波雷达频段有三类。
其一是24—24.25GHz这个频段,目前大量应用于汽车的盲点监测、变道辅助。雷达安装在车辆的后保险杠内,用于监测车辆后方两侧的车道是否有车、可否进行变道。这个频段也有其缺点,首先是频率比较低,另外就是带宽(Bandwidth)比较窄,只有250MHz。
另一个频段就是77GHz,这个频段的频率比较高,国际上允许的带宽高达800MHz。据袁帅介绍,这个频段的雷达性能要好于24GHz的雷达,所以主要用来装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,实现的主要是紧急制动、自动跟车等主动安全领域的功能。
第三类应用频段就是79GHz—81GHz,这个频段最大的特点就是其带宽非常宽,要比77GHz的高出3倍以上,这也使其具备非常高的分辨率(雷锋网新智驾注:后文会对“分辨率”有详细阐释),可以达到5cm。这个分辨率在自动驾驶领域非常有价值,因为自动驾驶汽车要区分行人等诸多精细物体,对带宽的要求很高。袁帅表示,这个频段在未来的自动驾驶领域会有很广泛的应用。
而在波长方面,24GHz毫米波的波长是1.25cm,而77GHz毫米波的波长大概是4mm,毫米波的波长要比光波的波长长1000倍以上,所以它对物体的穿透能力更强。
举个例子,我们通常看到的灰尘的直径大概在1um—100um之间,自然界的雨点的直径在0.5mm—4mm的范围内。所以波长与它们相等或者更长的电磁波可以轻易穿透这些障碍物,毫米波便拥有这样的能力。
这种可靠性是其他任何传感器难以达成的,所以在ADAS这样一个对安全性、可靠性要求比较高的领域,毫米波雷达拥有很难撼动的地位。
二、毫米波雷达在车载领域的发展史
实际上,在上世纪60年代的美国,毫米波雷达便开始在车载领域应用,但是当时的工艺水平较低,应用的是单天线,前端只能一收一发,其频率只有10GHz。而且,在袁帅的描述中,这种雷达装置配备在车辆的前方并不美观,“基本上就像是两个盘子在那放着。”
之后,为了缩小其体积,业内专家不断将频率往上提,来到30GHz、50GHz。雷达频率越高、天线尺寸就越小,意味着同样尺寸的雷达,其天线波束的集中度更高。
到了90年代,就发展出了60GHz、77GHz和94GHz的毫米波雷达。60GHz频段后来主要用来通信,94GHz主要是军用频段,而工业上则选择了77GHz作为主流的毫米波雷达的频段。
在历史上,也有比较典型的毫米波雷达应用。1992年,美国交通部门在灰狗公交车上安装了1500套毫米波雷达,到1993年取得了立竿见影的效果:交通事故发生率下降了25%。不过最后因为效果太好,损坏了一些既得利益者的利益,所以在1994年被全部拆除。
时至今日,全球主要有四大毫米波雷达供应商(雷锋网新智驾注:当然它们的业务也不仅限于毫米波雷达),简称为ABCD,即Autoliv、Bosch、ConTInental和Delphi。
Autoliv以24GHz盲点、变道辅助雷达为主,主要客户是戴姆勒奔驰——其车辆基本标配了变道辅助,Autoliv的毫米波雷达出货量很大。
Bosch的毫米波雷达主要以77GHz为主,覆盖的面比较广,有长距(LRR)、中距(MRR)以及用于车后方的盲点雷达。Bosch的方案集成度非常高,输出的是对汽车的控制信号,其定制性很强,通常是与大型车企合作一个车型,共同推进项目。
ConTInental在毫米波雷达产品方面既有24GHz,也有77GHz,性能做得还不错,戴姆勒的77GHz毫米波雷达主要由ConTInental供应。
Delphi则是美国老牌企业,以77GHz毫米波雷达为主,采用较为传统的硬件方案,成本比较高,性能不俗。
三、毫米波雷达对距离、速度和角度的探测
需要明确的一点是,毫米波雷达在测量目标的距离、速度和角度上展现的性能和其他传感器还是略有区别的。视觉传感器得到的是二维信息,没有深度信息,而毫米波雷达则是具备深度信息的,可以提供目标的距离;激光雷达对于速度并不敏感,而毫米波雷达则对速度非常敏感,可以直接获得目标的速度,因为毫米波雷达会有很明显的多普勒效应,通过检测其多普勒频移可将目标的速度提取出来。
毫米波雷达最基本的探测技术是使用FMCW连续线性调频波去探测前方物体的距离,毫米波雷达发射的是连续波,在后端处理上要比激光雷达的运算量大。
其原理在于:
振荡器会产生一个频率随时间逐渐增加的信号,这个信号遇到障碍物之后,会反弹回来,其时延是2倍距离/光速。返回来的波形和发出的波形之间有个频率差,这个频率差和时延是呈线性关系的:物体越远,返回的波收到的时间就越晚,那么它跟入射波的频率差值就越大。
将这两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低就可以判断障碍物的距离。
此外,为了探测目标的速度,也有更为高级的调频技术来实现,主要以多普勒频移原理为基础。
角度的探测是通过多个接收天线接收到信号的时延来实现。举个简单的例子,假设有2根天线,接收从某个方向发出的电磁波,这个电磁波到达2根天线的时间是有差值的,或者说是相位差,通过这个相位差可以评估信号的角度。
这里要引入一个非常重要的概念——毫米波雷达的分辨率。其定义是“雷达可以区分的两个物体的最近的距离”,比如,两个物体靠得很近,那么雷达可能会将其列为一个物体,如果分得开一些,雷达会看到两个物体。那么究竟离多远雷达能区分两个物体间的距离,这个就叫做雷达的分辨率。
分辨率的计算公式也很简单,就是光速/2倍的雷达带宽,所以对于24GHz和77GHz来说,可以直接算出其分辨率。前者是0.6m,后者则约为20cm。而3GHz带宽的毫米波雷达的分辨率可以做到5cm,非常适合自动驾驶的应用。
此外,在关键性的天线技术方面,毫米波雷达有两种,一种是基于透镜,另一种是用PCB印刷。基于透镜的天线开发灵活度较小,因为最后会聚焦到一个很小的区域,这个区域不大容易安排灵活的设计。
四、未来
总体来说,毫米波雷达成本下降的速度还是比较快的,因为它是硅基的芯片,没有特别昂贵和复杂的工艺。而激光雷达则在光的收发器和组装工艺要求高,成本比较难降下来。
激光雷达目前还有一个非常重要的技术是固态激光雷达,它实际上与传统雷达、毫米波雷达是一脉相承的,固态激光雷达实质上就是调整每个发射和接收单元的相位,毫米波雷达也是同样的原理,只不过毫米波雷达是对电磁波进行操作,器件的实现难度要比对光的频段上进行相位的改变的难度低很多。
而对于毫米波雷达的市场前景。一辆车上会搭载3-8颗毫米波雷达,目前奔驰的高端车上也已经安装了7颗。未来10年,车载毫米波雷达的市场规模将不容小觑。
从政策上来讲,各个国家都在推进汽车的AEB功能,其中日本和北美已经在推行,中国也将在2018年推行到商用车领域。
毫米波雷达在ADAS领域是很难被取代的传感器,虽然有一些缺点,但是是唯一的全天候工作的传感器。其测速、测距的精度要远高于视觉,与激光雷达相比,其测速精度会高一些。穿透力会更好。但是整体来讲,这并不冲突,因为未来会走向融合的趋势,特别是针对无人驾驶,毋庸置疑三大传感器会相互融合。
上一篇:毫米波雷达的优势,ADAS趋势下的大爆发
下一篇:基于骁龙820A平台并运用深度学习的ADAS产品原型方案介绍
推荐阅读最新更新时间:2024-07-25 19:59

 无人驾驶车辆模型预测控制 (龚建伟, 姜岩, 徐威)
无人驾驶车辆模型预测控制 (龚建伟, 姜岩, 徐威) 人机共驾智能车辆行为决策建模与安全性评估方法
人机共驾智能车辆行为决策建模与安全性评估方法 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用













 京公网安备 11010802033920号
京公网安备 11010802033920号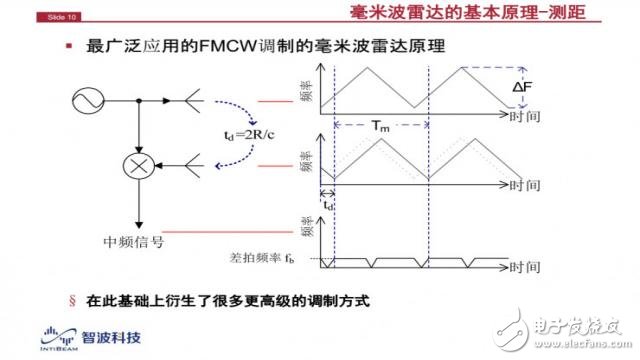{kind=link}