机器人的概念已经是非常地广泛,本文所探讨的是工业自动化产业所需的机器人关节用伺服电机,暂不涉及到服务型机器人的复合一体化关节伺服电机。
工业机器人大体上分类为线性机器人(又叫直角坐标机器人)、多自由度机器人(又叫多关节机器人)、并联机器人(又叫deltaΔ机器人)和水平多关节机器人(又叫scara机器人)。由各种类型的关节机械手臂和自动化传输设备结合而成的自动化岛。不同功能的自动化岛链接而成自动化线,不同的自动化线结合组成自动化车间。
在这些自动化工业机器人和自动化单元之间,伺服电机始终处于将机构按照控制指令的要求准确、及时、稳妥地传送到位的关键作用,所以属于核心零部件。
永磁伺服电机的基本概念
伺服是根据控制电脑系统的指令能够不折不扣执行的意思,它不仅仅限于电动机、液压,包括气动在内,能完成该任务的所有元件均为伺服原件。
电动机是将电能转换成机械能的机电转换部件。伺服电机是能被应用于运动控制系统中的电动机,它的输出参数,如位置、速度、加速度或转矩都是可控的。
由于控制指标的不同,伺服电机可以有不同类型。按照电源类型的不同可分为交流伺服电机和直流伺服电机;按照运转方式又可分为直线型伺服电动机和旋转型伺服电动机。直线型电动机直接产生牛顿力,旋转型电动机输出旋转力矩。旋转型电动机驱动直线型负载需要通过丝杠等机械机构将旋转运动转换成直线运动。
旋转型交流伺服电机按照转子结构分为交流异步伺服电机和交流同步伺服电机。交流异步伺服电机转子为铝制或铜制鼠笼,鼠笼转速始终和同步旋转磁场有一定转速差。该类型的电机在矢量调速技术下可获得与直流电机一样完美的力矩控制特性,但是转子具有惯量大、恒功率特性好、调速范围宽的特点,适合于机床切削和印刷机械收放卷类等大范围的变惯量负载,缺点是启动力矩小,电磁响应速度不如永磁伺服电机,电磁时间常数值是永磁材料制成的永磁电机的10倍左右,又由于功率密度低,转子尺寸大,所以不适合高动态的伺服场合。
旋转型交流同步伺服电机的转子使用的是永磁材料,直接产生励磁磁场,不存在需要励磁电流建立电机磁场的过程,所以电磁响应快。并且,由于当前的稀土永磁材料能量密度高,使得该类电机功率密度高,为进一步设计成各种特性的伺服电机提供了可能。高动态响应可以设计成细长型的小转子惯量,也可以设计成粗短型的大转子惯量。稀土永磁材料的使用奠定了永磁电机作为伺服电机的首选可能。由于稀土永磁材料仍然是伺服电机各材料中最昂贵的部分。不同厂家使用的材料的差异,将产品品质分成了不同的层次。好的永磁材料可以是在150℃的工作温度以上不会退磁,差的永磁材料在电机工作温度不足120℃时可能就会出现退磁。永磁材料的直接决定着伺服电机的不同特性。
直线伺服电机直接输出牛顿力,无需通过机构转换,可以获得很高的加速度,近年来,技术进步很快,广泛应用于高性能机床进给轴,在工业机器人上仅限于部分用于线性机械手臂,不作为本文介绍的重点。本文重点讨论旋转型永磁伺服电机及其在工业机器人上的应用。
旋转型永磁电机的结构
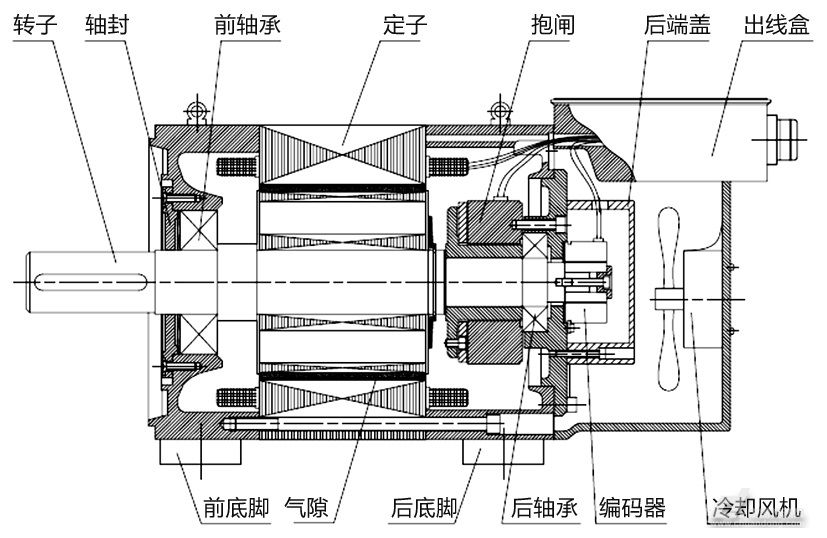
图1 永磁伺服电机的结构图
图1所示的是典型的永磁伺服电机的结构图。为了全面描述,尽量通过一个图可以看清永磁伺服电机结构的全貌。事实上小功率永磁伺服电机在15kw以内,可以自然散热,无需设计冷却风机,电机小巧,无需通过安装地脚固定,安装吊环也是不必要的,引出线方式从接线盒改为航空插头更为简洁。这样电机外形就变成图2(a)所示的样子,如果电机很小,在1kw以内,引出线用的航空插头也是不必要的,直接引出一段电缆甩线,就变成了图2(b)所示的样子。
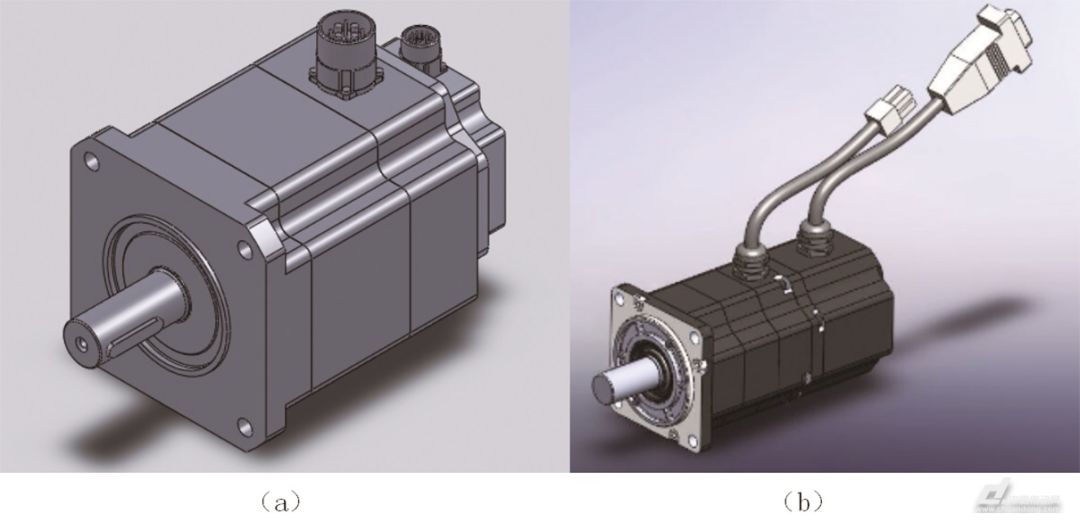
图2 小功率永磁伺服电机外形图
这里假设读者对于电机原理是理解的,仅从机器人电机的特点对永磁伺服电机的结构做区别性说明。
轴承:伺服电机的寿命和轴承密切相关,由于机器人对可靠性和耐用性的要求,轴承至少要确保30000小时的使用寿命。这样按照8小时工作制折算,至少机器人的使用寿命在10年以上,轴承的转速要确保6000rpm可以断续工作。
定子冲片和绕组:由于机器人电机需要高功率密度,为了体积小,铁耗发热小,冲片材料要在0.35mm以下的冷扎矽钢片。绕组要长期经受16K的变频载波脉冲冲击,为了防止被击穿,承受密集的dv/dt冲击,耐压要不低于2500V。
转子永磁材料:永磁材料是永磁伺服电机里最为昂贵的部分,稀土元素含量低的材料居里点低,材料稳定性差,如果使用钕铁硼永磁体,最好在UH42以上,并且,要注意镝等稀土元素的含量,为了保证高温抗退磁,钐钴永磁体也经常在中小伺服电机中广泛使用。总之,要确保伺服电机在正常的使用场合真正永不退磁。否则,机器人的长期稳定性能无法保障。
轴封:为了防止油污,杂物进入电机,又要保证运转,在电机轴端加轴封是常规设计。机器人常常在伺服电机的电机轴端铣一个小齿轮、电机和减速机直接相连,高温和油污都可能进入电机,因此,就需要多唇高温轴封,比如双唇氟橡胶轴封就比单唇丁晴橡胶轴封可靠,当然成本差异也很大。
抱闸:抱闸是机器人电机的基本选项。近乎95%以上的伺服电机需要抱闸,要确保时刻抱闸,尤其在紧急停车时可靠运行,抱闸需要有足够的安全系数,静扭矩大约在电机额定扭矩的1.5倍左右,重载型机器人电机抱闸的安全系数要达到2.0甚至2.5倍。有一点需要注意的是,机器人电机的抱闸是安全制动器,不是刹车制动器,控制上要确保在急停状态下通过制动电阻让伺服驱动器的刹车电路工作,电机转速接近0的时候抱闸动作。为了提高抱闸的响应速度,永磁抱闸优于电磁弹簧抱闸。
编码器:编码器安装于电机尾端,是属于电机速度和转子位置传感器。可以测量转子的位置用于伺服控制磁场定位和转子实际位置和速度给控制电脑,用于运动轨迹计算。机器人电机编码器一般精度不高,但需要多圈绝对位置可测量,保证断电之后,再次运行,断电前面的位置可以记忆。目前流行三种方式解决机器人电机编码器的问题。第一种方式是单圈采用格雷码光电或磁码盘,多圈采用机械齿轮。这样的好处是测量精度高,断电后约会通过编码器的机械位置记住电机的运行位置,上电后直接读取即可,但缺点是编码器太厚,在有限的安装空间下就显得过分长。第二种是单圈信心通过光电或磁编格雷码记忆,多圈通过电池供电电子记忆,这样就可以把编码器做得很短,对外方小于60mm的小伺服电机非常适合。缺点是电池的使用寿命比较短,长则2-3年,有的1年就要更换电池。第三种方式是精度要求不高的场合才使用的旋转变压器测量单圈位置,多圈信息通过在控制箱里的带电池电路板完成。
转子轴伸:由于频繁的正反转,电机承受一定的剪切力,轴的材料最好采用42CrMo调制。若果电机带键安装,无论如何要把键满装,这样才可以有效减小电机的的动平衡和跳动量。在高速运转下,伺服电机带键和光轴的空载运行跳动要相差9倍之多,不可小视。
永磁伺服电机主要传动参数
工作区:在电动机温升不超过允许温升的条件下,电动机能长期工作的区域称为连续工作区;在连续工作区之外,允许电动机短时运行的区域称为断续工作区。工作区用转矩和转速的二维平面坐标表示。
额定功率PN:在连续工作区内,电动机所能输出的最大功率。
额定转矩MN:在连续工作区内,电动机输出额定功率时的转矩。不同制造商对于额定转矩的定义差别很大。一般都要规定对应的散热条件。国外通行的做法是说明改指标是在多少面积和厚度的铝板法兰上安装,法兰温度保证在20℃或给定的温度之下测量所得。所以实际工作中往往由于安装在铸铁件,而且夏季高温超出该测试标准温度,这样使用时如果不留有余量,就会造成过热退磁。国标规定环境温度40度的标准条件对中国环境是比较合理的。严肃的厂商在按照标准测定的额定值之下会留取一定的设计余量作为公布的额定力矩,这样更为安全。
额定电流IN:额定扭矩对应的电流。
额定转速nN:电动机在连续工作区内,在额定转矩下允许工作的最高转速。
连续堵转转矩MO:在连续工作区内,电动机堵转时所能输出的最大转矩。一般转速低于100rpm视为堵转工作区间。
连续堵转电流I0:对应连续堵转转矩时的电流。
峰值扭矩Mmax:允许电机输出的最大力矩。不同厂商标称条件不同,且差异很大。有的标注成退磁电流对应的力矩,这样的标注实际是不可使用改峰值力矩的,机械设计人员要留有足够的余量,以防工作力矩过大而使电机退磁失效。如果按照工作制标注的最大力矩,那是在工程上具有参考价值的。按照S3-10%标注的峰值力矩是最具有工程的参考价值,可以理解为连续工作时间3s所允许的最大工作转矩,这在机器人上是足够的。多关节机器人的重复过载一般在2.0倍上下。
峰值电流Imax:峰值力矩对应的工作电流。
电气时间常数Te:电流对于所加电压的响应速度的特性常数,定义为电动机端子间加上固定的电压之后,电流成为最终电流的1-e-1(约63.2%)时所用的时间。伺服电机的电气时间常数一般是指定子绕组的电感与电阻的比值(te=L/R),与伺服系统的电流阶跃响应时间有关,但未必相当。
机械时间常数Tm:伺服电机的机械时间常数根据定义:tm=R*J/Ke*Kt,即与绕组电阻、转子转动惯量、电机反电势系数、电机力矩系数有关。拖动电机的机械时间常数大约与空载从零速加速到平衡转速的63.2%所需的时间相当。在伺服系统中,该常数在数量上可能与系统的速度环阶跃响应时间相当。
反电动势常数Ke:电动机在单位转速下感应的空载反电势值。常规指每1000rpm对应的空载反电势,单位为V/Krpm。
扭矩常数Kt:单位电流对应的电机输出扭矩。电机的反电势系数Ke与力矩系数Kt之间的关系,一般Kt=9.55*Ke*1.732,其中Kt的单位是Nm/A,Ke的单位是V/rpm,Ke=Kt。Ke这里是线反电势。
如果电机资料里没有给出Kt和Ke参数,可以根据额定力矩和额定电流导出Kt,然后根据Kt=9.55*Ke*1.732间接导出线反电势系数Ke了,即:Ke=0.1047*Kt/1.732,单位V/rpm;或者:Ke=104.7*Kt/1.732,单位V/Krpm,或mV/rpm。
由于电源电压的限制,为了保证高响应,电机的反电势常熟就要设计的相对较低,保证高速下有足够的压差从而获得充足的电流。而大电流对电机增加了电机的发热负担。从而使得机器人电机的功率密度要较高,能实现小体积,大扭矩,低发热。
转子转动惯量J:电动机转子的转动惯量.机器人电机的转动惯量非常重要,直接关系到机器人工作的稳定性。因为机器人往往是多轴联动的。比如关节机器人的第二轴,需要很大的电机惯量来适应臂展打开和收缩起来的巨大负载惯量变化。
齿槽转矩:当带永磁体的电动机绕组开路时,电动机回转一周内,由于电枢铁心开槽,有趋于最小磁阻位置的倾向而产生的周期性转矩。
过载能力:在规定条件下,电动机能够在规定的时间内输出一定功率或转矩而不超过规定峰值电流的能力。通常把峰值电流与额定电流之比称为电流过载倍数,峰值转矩与额定转矩之比称为转矩过载倍数。通常机器人电机要保证3倍左右的扭矩过载。
最高转速nN:在间歇工作区内,电动机所能达到的最大转速。不同的电机厂对于最高转速的定义差别很大,机器人电机常常给出的是实际运行时可以重复工作的最高转速。在最高转速时,对应的最大力矩可以超过额定力矩的2倍,这样保证全速度范围的加速响应。
上一篇:论述伺服驱动控制器的实现方法
下一篇:西门子伺服运动控制系统在全自动纸箱包装机的应用
推荐阅读最新更新时间:2024-11-12 16:40

 纯电动汽车动力电池及管理系统设计 (董艳艳,王万君主编)
纯电动汽车动力电池及管理系统设计 (董艳艳,王万君主编) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用





- number plate
- 用于能量收集的 DC 到 DC 单输出电源
- LT6656BCDC-2.5、2.5V 扩展电源范围电压基准的典型应用
- DC1496B-C,基于具有 I2C 接口的 LTC2941-1 电池电量计的演示板
- 基于VIPer01的5V/200 mA高压降压转换器
- 负载点的电源跟踪和排序:简单的设计,没有 MOSFET 的缺点
- DC1418A-B,使用 LT6604-5、5MHz 双通道、匹配、全差分低通滤波器的演示板
- 具有过压锁定功能的 LTC3638EMSE 4V 至 90V 输入至 12V/500mA 输出稳压器的典型应用电路
- AD8615AUJZ-REEL7单电源缓冲网络运算放大器典型应用电路
- LT8601EUJ 同步降压型稳压器的典型应用电路












 京公网安备 11010802033920号
京公网安备 11010802033920号