前言
本章节采用工程设计的方法,推导转速环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的转速外环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行Bode图分析,最后通过一个设计实例进行仿真验证。
一、调节器的工程设计方法
要实现调节器的工程设计方法,首先要简化问题,突出设计的主要矛盾。简化的基本思路就是把调节器的设计过程分成两步:
1、选择调节器的结构,以确保系统稳定,同时满足所需要的稳态精度
2、再选择调节器的参数,以满足系统动态性能指标的要求
选择调节器的结构,使系统能满足所需要的稳态精度,这是设计过程中的第一步。由于III型及III型以上的系统很难稳定,因此常把I型系统和II型系统作为系统设计的目标。
二、转速环PI调节器的参数整定
工程设计方法的原则是:先设计内环后设计外环,上一章节设计了永磁同步电机磁场定向控制的电流内环PI调节器,本章节接着设计转速外环PI调节器,不同于将电流内环校正为典型I型系统, 转速外环的设计目标是将系统校正为典型II型系统 。
2.1.转速环的结构框图
控制系统的数学模型是进行设计的基础,下图为转速环的结构框图:



将电流环的等效传递函数填入转速环的结构框图如下:

通过下述处理,进一步简化转速环的结构框图:

简化后的转速环结构框图为:


2.2.典型II型系统






2.3.转速环PI参数整定计算公式


三、转速环PI调节器设计实例
3.1.永磁同步电机磁场定向的转速外环电流内环双闭环控制


3.2.转速环PI参数计算
电机参数如下:

设定系统采样频率为20KHz,即Ts=0.00005s,h设计为2.1,由转速环PI调节器参数计算公式得:
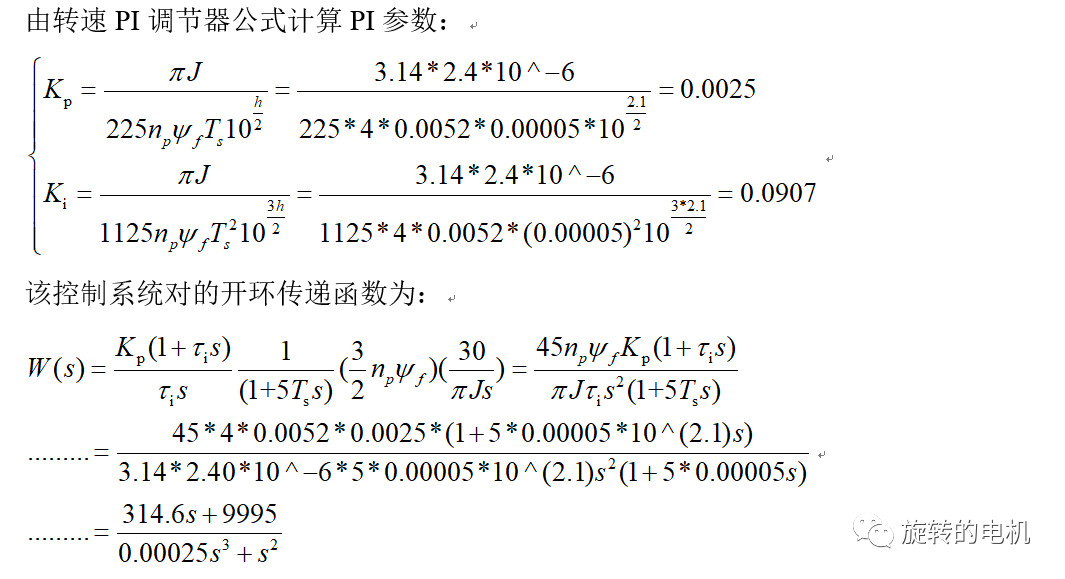
绘制该系统开环Bode图如下:

该系统的截止频率wc为315rad/s位于1/tao和1/T的中间,此时获得系统最大相角裕度为79.7度,符合自己的设计要求。
绘制该系统的闭环Bode图如下:
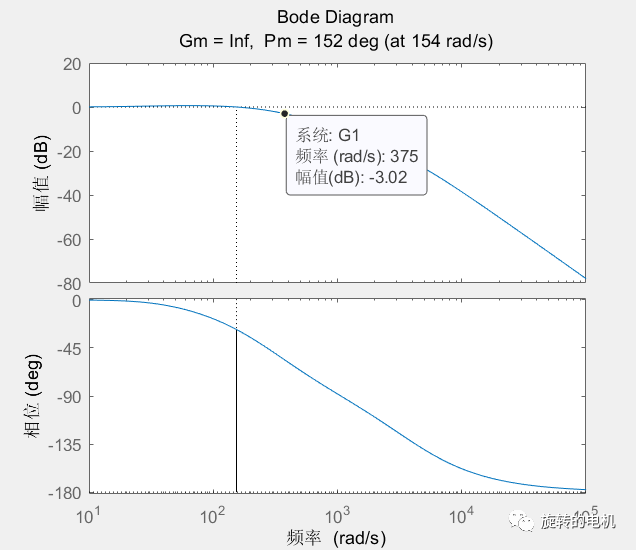
由上图可知该系统的带宽频率约为375rad/s。
3.3.仿真分析
将Kp=0.0025,Ki=0.0907带入仿真模型的转速环PI调节器中,上一章节计算出的电流内环PI参数Kp=5.25,Ki=3750带入两个电流环调节器中,进行仿真分析:
电机转速:如果控制效果不好可以在工程设计参数的基础上进行参数微调也可以重新选择h值进行上述计算。

电机定子电流:

转子位置:

同步旋转坐标系下的定子电流Id、Iq:

同步旋转坐标系下的定子电压:

电磁转矩:

总结
本章节采用工程设计的方法,推导出了转速环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的转速外环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行了Bode图分析,最后通过一个设计实例进行了仿真验证,为后续章节的分析奠定基础。
上一篇:在哪几种情况下会造成伺服电机抖动
下一篇:永磁同步电机FOC控制的基本原理及Matlab/Simulink仿真分析
推荐阅读最新更新时间:2024-11-10 06:40

 基于FOA优化PID参数的永磁同步电机转速控制_王萍
基于FOA优化PID参数的永磁同步电机转速控制_王萍 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用





- SEC-25KW-SIC-PIM-GEVK:全碳化硅 25kW 直流 EV 充电器平台
- 使用 Diodes Incorporated 的 PT8A 3515C 的参考设计
- USBHUB
- -12V, 5V, 12V 交流转直流多路输出电源
- LR8 高输入电压、可调 3 端子 LDO 的典型应用
- MIC803 的典型应用:具有开漏复位输出的 3 引脚微处理器监控电路
- 蓉宝”的大熊猫
- 具有双输入的 LTC3126EFE 12V、2MHz 降压转换器的典型应用电路
- LT4275AHMS LTPoE++ 38.7W 至 90W 受电设备的典型应用电路
- RSL10-002GEVB:无线电 SoC 评估板,版本 1(基于 QFN)






- 科学家研发基于AI的身份验证工具 可保护车辆免受网络攻击威胁
- Microchip推出广泛的IGBT 7 功率器件组合,专为可持续发展、电动出行和数据中心应用而设计
- 面向未来驾驶体验 博世推出新型微电子技术
- 英飞凌与马瑞利合作 利用AURIX™ TC4x MCU系列推动区域控制单元创新
- 5C超充,该怎么卷?
- 《2025年度中国汽车十大技术趋势》正式揭晓!你最看好哪个?
- Microchip推出新型VelocityDRIVE™软件平台和车规级多千兆位以太网交换芯片,支持软件定义汽车
- 英特尔中国正式发布2023-2024企业社会责任报告
- can转485数据是如何对应的
- MCU今年的重点:NPU和64位






 京公网安备 11010802033920号
京公网安备 11010802033920号