前言
主控板STM32F302R8+驱动板X-NUCLEO-IHM07M1+直流无刷电机WR36BL61,采用六步换相法实现电机的正反转驱动。
一、驱动板X-NUCLEO-IM07M1简单介绍
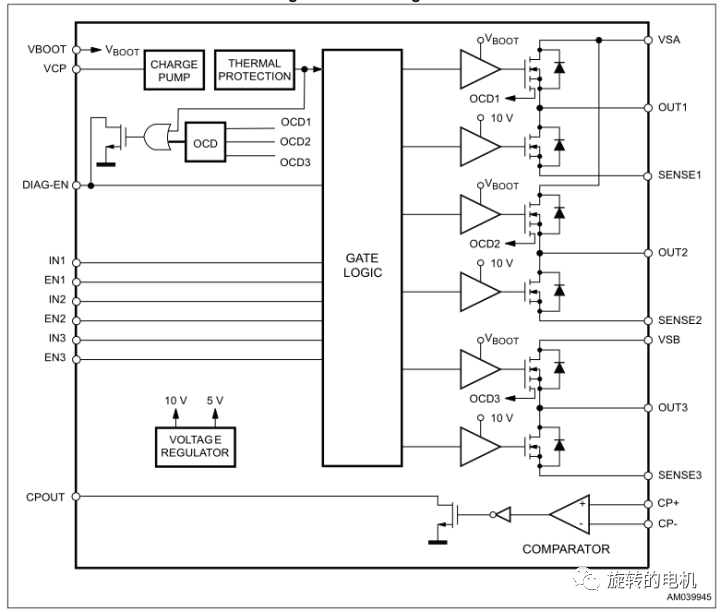
X-NUCLEO-IHM07M1驱动板有一颗MOS管集成芯片L6230,该驱动芯片集成有3个桥臂6颗MOS管可驱动PMSM及BLCD电机,内部结构如下图所示。
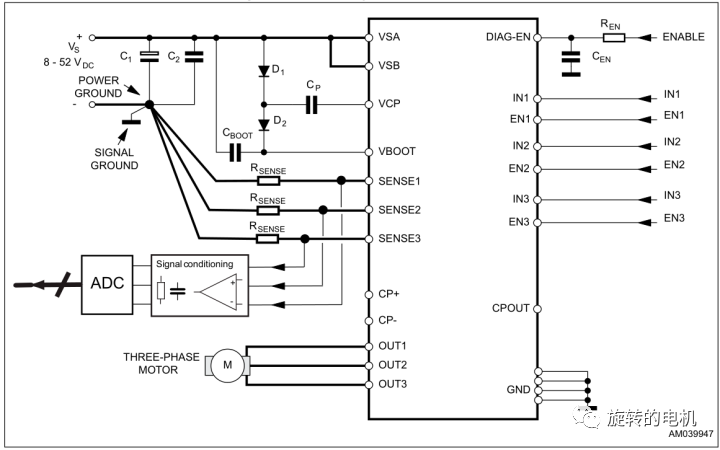
其典型应用如下图所示:
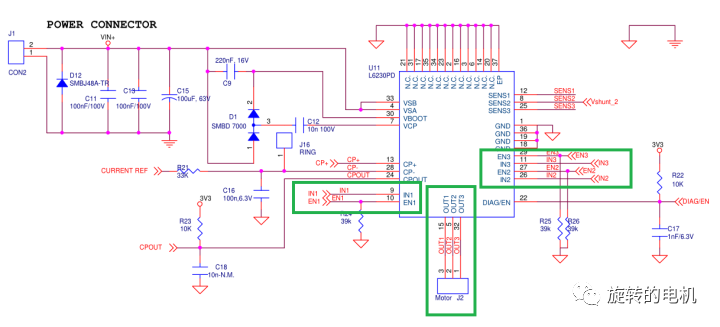
X-NUCLEO-IHM07M1驱动板的驱动电路如下图所示,采用桥臂1、桥臂2以及桥臂3构成的三相逆变电路驱动无刷直流电机,EN1、EN2以及EN3为为每相桥臂的使能控制输入,IN1、IN2以及IN3为每相桥臂的开关控制输入,OUT1、OUT2以及OUT3为输出,外接无刷直流电机。
二、STM32F302R8+X-NUCLEO-IHM07M1驱动直流无刷电机
2.1.功能需求
采用六步换相法驱动无刷直流电机转动,并实现直流无刷电机的换向控制。按下一次按键电机正转;再按一次按键电机停止;再按一次按键电机反转;再按一次按键电机停止,以此循环。
2.2.硬件设计

控制板:STM32F302R8
驱动板:X-NUCLEO-IHM07M1
直流无刷电机:WR36BL61,额定功率10W,额定电压24V,额定电流0.5A,转速2000RMP,极对数2。

2.3.软件设计
本次软件设计框架为:STM32CubeMX配置底层代码;底层与应用层的接口代码在Keil环境下开发;应用层代码在Matlab/Simulink中开发。
STM32CubeMX底层配置
为了更直观简单地实现直流无刷电机的六步换相控制,将所用引脚均设置为普通I/O口模式。
1、RCC设置为外接时钟,72MHz
2、PA8、PA9、PA10、PC10、PC11、PC12设置为推挽输出、无上下拉电阻、高速,初始化状态设为0; PA15、PB3、PB10设置为输入,无上下拉电阻; PB13、PB2设置为推挽输出,下拉电阻、高速,初始化状态为0; PC13设置为输入,无上下拉电阻。
3、IDE设置为MDK-RAM,在Keil环境中完成编译下载



Keil应用层与底层的接口开发
#include "Interface.h"
uint8_t EN1_State;
uint8_t EN2_State;
uint8_t EN3_State;
uint8_t IN1_State;
uint8_t IN2_State;
uint8_t IN3_State;
uint8_t LED1_State;
uint8_t LED2_State;
//获取按键状态
uint8_t Get_KeyState(void)
{
return HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin);
}
//获取三路霍尔传感器状态
uint8_t Get_HallAState(void)
{
return HAL_GPIO_ReadPin(H1_GPIO_Port, H1_Pin);
}
uint8_t Get_HallBState(void)
{
return HAL_GPIO_ReadPin(GPIOB, H2_Pin);
}
uint8_t Get_HallCState(void)
{
return HAL_GPIO_ReadPin(GPIOB, H3_Pin);
}
//设置引脚状态
void Set_EN1State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOC, EN1_Pin, (GPIO_PinState) PinState);
}
void Set_EN2State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOC, EN2_Pin, (GPIO_PinState) PinState);
}
void Set_EN3State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOC, EN3_Pin, (GPIO_PinState) PinState);
}
void Set_IN1State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOA, IN1_Pin, (GPIO_PinState) PinState);
}
void Set_IN2State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOA, IN2_Pin, (GPIO_PinState) PinState);
}
void Set_IN3State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOA, IN3_Pin, (GPIO_PinState) PinState);
}
void Set_LED1State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOB, LED1_Pin, (GPIO_PinState) PinState);
}
void Set_LED2State(uint8_t PinState)
{
HAL_GPIO_WritePin(GPIOB, LED2_Pin, (GPIO_PinState) PinState);
}
//无刷直流电机驱动
void BLDC_SixStepDriver(void)
{
Set_EN1State(EN1_State);
Set_EN2State(EN2_State);
Set_EN3State(EN3_State);
Set_IN1State(IN1_State);
Set_IN2State(IN2_State);
Set_IN3State(IN3_State);
}
//LED驱动
void LED_Driver(void)
{
Set_LED1State(LED1_State);
Set_LED2State(LED2_State);
}
应用层开发

输入处理:包括霍尔信号处理模块和按键处理模块。



电机运行模式:设计有电机停止、电机正转、电机反转三种模式,LED1用于指示程序运行“500ms亮,500ms灭”。


电机模式运行执行模块:
电机停止:关闭引脚驱动输出

电机正转:内部逻辑用Stateflow写,根据霍尔状态控制开关管进行六步换相控制
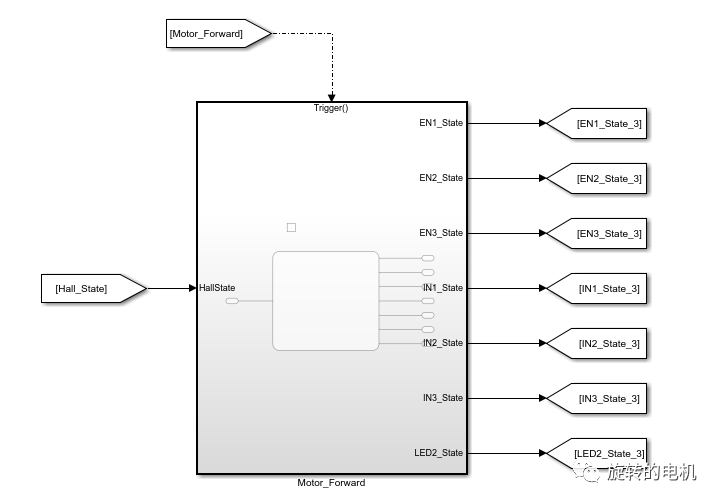
电机反转:内部逻辑用Stateflow写,根据霍尔状态控制开关管进行六步换相控制

输出处理:将需要的信号进行输出

模型搭建完成仿真无误后生成代码,与底层代码在Keil中集成。

应用层与底层的代码集成
将Matlab/Simulink模型生成的代码文件夹复制到底层生成的工程下。

在工程中将Matlab/Simulink生成的代码文件BLDC_SixStep目录中的.c/.h文件都添加进工程。
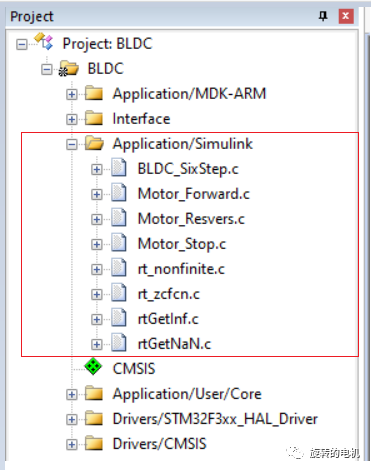
注:此时编译工程会报错,缺少“solver_zc.h”头文件,该头文件在Matlab/Simulink/Include路径下面,可以直接把该文件粘贴复制到Matlab/Simulink生成的代码文件BLDC_SixStep目录中,也可以将该文件的路径进行添加。
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
BLDC_SixStep_initialize();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
BLDC_SixStep_step();
BLDC_SixStepDriver();
LED_Driver();
HAL_Delay(1);
}
/* USER CODE END 3 */
}
在主函数中调用Matlab/Simulink生成代码中的函数,BLDC_SixStep_initialize()为模型初始化函数;BLDC_SixStep_step()为模型函数, 执行该函数一次,相当于在Matlab中运行模型一次, 根据BLDC_SixStep_step()函数的运算结果进行电机驱动。在Matlab/Simulink中设置模型1ms运行一次,所以在工程下也要确保BLDC_SixStep_step()函数1ms运行一次。
2.4下载验证
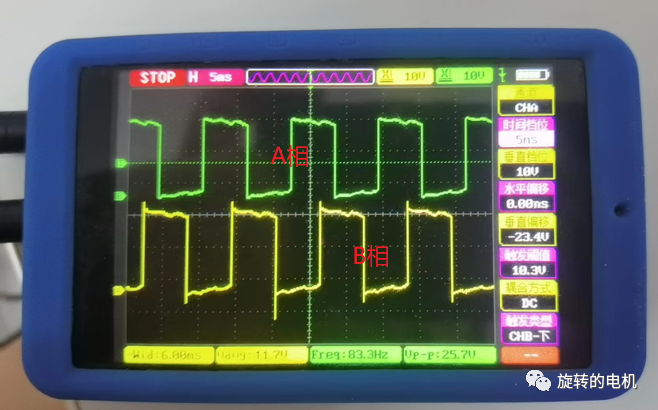
电机正转:A相和B相上的电压

电机反转:A相和B相上的电压
总结
本章节基于STM32F302R8控制板和X-NUCLEO-IHM07M1驱动板,采用六步换相法实现了直流无刷电机的正反转驱动,并且软件编程的工具链采用STM32CubeMX+Matlab/Simulink+Keil,大部分代码采用自动生成的方式简化了编程的难度。
上一篇:永磁同步电机流频比I/F控制原理及Matlab/Simulink仿真分析
下一篇:步进电机与同步电机的区别
推荐阅读最新更新时间:2024-11-13 12:54

 电工电路分析与测试 (张明金)
电工电路分析与测试 (张明金) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用

















 京公网安备 11010802033920号
京公网安备 11010802033920号