前言
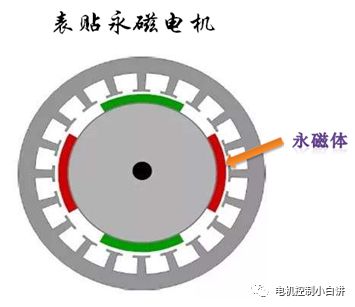
表贴式永磁同步电机凭借结构简单、控制相对容易、转矩精度高和动态性好的优点,在中低速工业领域获得了极其广泛的应用,比如主轴伺服、工业机器人等行业。本期我们就来聊一聊表贴式永磁同步电机如何进行弱磁控制。
基于电机参数的弱磁控制算法
由于永磁体内部的磁导率接近于空气,所以可以直接将永磁体作为气隙的一部分,对于三相绕组产生的电枢磁动势而言,表贴式永磁同步电机的气隙是均匀的,因此表贴式永磁同步电机的d轴和q轴磁路可以认为近似相同,即Ld=Lq=Ls。
对于表贴式永磁同步电机(SPMSM),其磁场定向轴系下的动态电压方程如下:

忽略电流变化的动态分量,SPMSM的稳态电压方程为:

在《永磁同步电机弱磁控制-基本概念》中,我们介绍了高速需要进行弱磁控制的原因是为了防止输出电压过饱和而导致的电流环失控,所以弱磁控制就是通过人为的改变电流给定以减小Ud或者Uq,达到防止输出电压Us过饱和的目的。
电机控制的目的是让电机输出期望的转矩(速度控制同样是利用速度环调节转矩给定),对于SPMSM而言,因为Ld=Lq,电机的电磁转矩完全由永磁转矩构成:

如果忽略永磁链的变化,SPMSM的输出电磁转矩与iq呈正比,所以在SPMSM控制系统中,工程师常常直接将速度环的输出设计为iqref,而不是转矩给定。
参数计算弱磁控制实现:
1、利用iqref和电机角速度计算出需求的Ud_cal:

注意:这里计算Ud_cal时,使用的idref是上一拍的值,因为我们费半天劲就是为了计算本拍的idref。
2、利用Usmax和Ud_cal计算出Q轴能使用的最大电压Uq_cal:

3、根据Uq_cal计算D轴电流指令idref:

通过以上步骤获得的电流指令组合(idref,iqref)就能使输出电压维持临界饱和,理论上可以保证电流环控制稳定。
这种利用反馈转速、Usmax和电机本体参数计算D轴弱磁电流指令,使电流环输出电压Us不超过最大输出电压Usmax的方法就是参数计算弱磁控制。
参数计算弱磁策略只需要利用电机本体参数进行简单的计算就能实现弱磁控制,便于理解且容易实现。虽然这种方法虽然从理论上能保持控制系统的可控性,但是在实际工程产品上却基本不会使用。这主要是因为这种弱磁控制极度依赖准确的电机本体参数,然而电机本体参数是难以准确获得的(其实是根本不可能获得)。
可能有的攻城狮会有这样的疑问:现在市面上很多厂家的变频器都有参数离线辨识功能,能够获取准确的电机参数,并用来进行磁场定向都能具有良好的性能,这些参数还能不准确吗??
其实就算是某些宣称能获取准确参数的厂家,其离线辩识获取的电机参数也不可能真的准确(就是这么不给这些厂家面子),以电控小白的经验来看辩识参数的偏差能控制在10%以内都已经很不错了。利用辩识出来的参数进行磁场定向能获得良好的性能,是因为参数的偏差主要是导致软件定向角度与真实磁场角度之间存在一定的角度偏差,影响电机转矩精度和最大转矩能力,在一般的应用场合这些问题不会暴露出来。
也许部分攻城狮朋友会说,电控小白尽整一些没用的东西,这种方法在实际产品上都不用,你还在这里罗里吧嗦半天,这真是冤枉啊。电控小白之所以会介绍这种方法,是希望通过它让大家能理解弱磁控制的基本思想。
基于D轴的电压外环弱磁控制
通过参数计算的弱磁控制算法,我们可以看出弱磁控制的基本思路是通过人为增加一个小于0的Idref,使Q轴电压降低,以达到减小输出电压幅值的目的。
基于这个思路,我们可以改用一个调节器去自动生成Idref,根据系统最大输出电压(Usmax)与电流环输出电压幅值(Us)的偏差来自动减小Q轴电压(Uq),这就是电压外环弱磁控制,其基本控制框图如下:

结合控制框图,我们可以详细分析一下这种电压外环弱磁控制的流程:
1)电压外环的输出是PI调节的结果,具体实现如下

2)当电机的转速升高或者iqref变大,导致电流环输出电压Us超过Usmax时,因为Usmax-Us<0,在电压外环PI作用下(尤其是积分的作用),idref将从0变为负数;

3)电流环根据电压外环输出的idref进行D轴电流控制,使Q轴电压Uq减小,实现Us的降低;
4)当电压外环输出的idref使Us降低到等于Usmax时,Usmax-Us=0,电压外环的PI输出不在变化,idref维持不变,电流环输出电压维持Usmax输出,实现对电流的控制;
5)当电机转速降低或者iqref减小时,电流环输出电压Us将小于Usmax,Usmax-Us>0,在电压外环PI作用下,idref将增大(负数—>0);使Q轴电压Uq增大,实现Us增大,将Us维持在Usmax附近,保证了控制系统电压利用率。
通过上面的5步分析,希望能帮助大家更好的理解电压外环弱磁的机制:利用电流环输出电压Us与最大输出电压Usmax的偏差,自动调节出D轴弱磁电流idref,使电流环的输出电压能维持在Usmax输出,保证系统电压利用率,使系统运行在最优状态。
Tips:
1)电压外环的输出值限制为小于等于0很重要:因为低速非弱磁区,电流环的输出电压肯定小于Usmax,如果这时候电压外环启动工作,则会正向积分,输出一个大于0的idref,使系统输出电压增大,这对我们控制是不利(尤其是极低速区,即使idref=ismax,也不可能使Us达到Usmax),这时候就需要将电压外环的输出限制为小于等于0,使电压外环只具有弱磁能力,而不能增磁。
2)电压外环依靠PI进行调节,理论上虽然可以将电流输出控制为Usmax,但真实情况是Us会在Usmax附近来回波动,PI的强度会影响Us的波动大小;不合适的PI参数可能会导致电压外环振荡失控。
3)电压外环弱磁控制需要Usmax与Us之间先产生偏差后才能调节idref,并需要一定的调节时间才能将Us控制到Usmax附近,因此在动态响应较快的应用场合,负载或转速快速变化时,电流可能会存在短时失控(一般是ms级时间),这是正常现象。在保证系统稳定性的前提下,增强PI参数可以缩短失控时间。
优点:不受电机参数的影响,即使电机参数偏差很大,也能自动调节弱磁电流,实现控制系统的弱磁控制;
缺点:引入了PI控制环路,增加了系统的不稳定风险,不合理的PI设置可能导致弱磁环路振荡甚至控制失效。
基于DQ双轴的电压外环弱磁控制
基于D轴的电压外环弱磁控制通过PI自动调节idref实现弱磁控制,这种弱磁方法对有限转速系统而言一般都能满足使用需求,但是它还有可以优化的地方。
我们先来分析一种工况:
前面电控小白说过实际电机系统都存在最大可运行电流,因此idref会有一个最小值idmin(id是负数,对应绝对值最大)限制。电机进入弱磁区域后,随着电机转速不断升高,idref将会逐渐减小(绝对值增大);只要转速升高到足够高,idref就会达到idmin,此时D轴电压外环饱和,失去弱磁调节能力,如果电机转速继续升高,系统将再次失去控制。
为了处理这种工况,进一步提升电机的弱磁运行区域,电控小白给大家分享一种优化的DQ双轴弱磁控制策略。
我们继续分析上面的工况:
对于D轴电压外环输出饱和这种工况,此时的idref=idmin,Uq达到当前转速下所能达到的最小值,此时已经不能通过减小Uq来减小Us。

Us是Ud和Uq的矢量合成,减小Ud的绝对值同样可以减小Us,因此这时候可以借鉴D轴电压外环弱磁的思想,通过电压外环来调节iqref,实现Us的减小,保证控制系统稳定,拓展电机的弱磁运行区域,其控制框图如下:

我们以正转电动(wr>0,iqref>0)工况来分析一下DQ双轴弱磁策略的作用机制:
1)当D轴电压外环饱和后,idref被限幅为idmin,此时电流环输出Us超过Usmax,在PI作用下,idref0将继续减小,使idref0与idref的偏差小于0:

2)sign(iqref0)是取iqref0的符号,即:

对于正转电动(iqref>0)情况,sign(iqref0)=1,因此:

因此利用△iq就能减小Q轴电流给定iqref,从而使Ud的绝对值减小,保证电流的受控性,拓展了电机的弱磁运行区域。
采用DQ双轴电压外环弱磁控制可以拓展电机的弱磁运行区域,但是这种拓展也是有限制的,不能使电机转速无限制的升高。当控制系统在电压外环的调节作用下,达到了idref=idmin,同时iqref=0,则系统已经处于极限弱磁转速,这表明在当前母线电压下,控制器所能使电机可控运行的极限能力也就是这样了,如果电机被主动负载拖动继续升高转速,电流将失去控制,可能导致变频器损坏。
这里举一个形象化的栗子方便大家理解:以电控小白现在的收入能力(母线电压),极限也就是在掏空六个钱包的情况下能在六环买一套80平的小房子(极限转速)(后悔年轻的时候没努力搞好技术,导致现在收入太低),如果忽视这个极限能力,强行去五环内买了一套三居,那电控小白最终只能是被房贷压垮,最后房子被银行没收,首付都打水漂了(控制器损坏)。
总结
这次分享主要介绍了表贴式永磁同步电机弱磁控制的基本思想,并结合这种思想介绍了三种常用的弱磁控制方法:参数计算弱磁策略、D轴电压外环弱磁策略、DQ双轴电压外环弱磁策略。
参数计算弱磁是基于理想的分析诞生的弱磁策略,对电机本体参数极度依赖,不具有产品化的实际意义。
D轴电压外环弱磁策略规避了对电机本体参数的依赖,增强了控制系统的鲁棒性,在工程产品中获得了广泛使用,这种弱磁方法基本能满足实际工况使用。
对D轴电压外环弱磁策略进一步优化得到DQ双轴电压外环弱磁策略,可以进一步拓展电机的弱磁区域;但是对Q轴电流的调节会降低系统出力能力,在实现上需要注意的细节更多。各位攻城狮可以结合自己的产品实际需求选择适合的弱磁策略。
本篇文章主要是针对有限转速电机系统的弱磁方法分析,在本专题的后续文章中,电控小白将带来关于无限转速系统电机的弱磁控制策略,并为大家分享另外一种弱磁控制思路—单电流调节器弱磁控制策略。
上一篇:电机驱动电路的优选IGBT单管
下一篇:永磁式步进电机参数介绍
推荐阅读最新更新时间:2024-11-13 06:32

 基于FOA优化PID参数的永磁同步电机转速控制_王萍
基于FOA优化PID参数的永磁同步电机转速控制_王萍 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
- TCR5SB34U、200mA、3.4V输出电压CMOS低压降稳压器的典型应用
- AD9753-EB,使用 AD9753、12 位、300 MSPS 高速数模转换器的评估板
- MAX1720 正输出电压三倍器的典型应用
- LTC3245EMSE 宽输入范围低噪声 3.6V 电源的典型应用电路
- DC2395A-D,基于 LTC2320-14 八通道、14 位、1.5Msps/ch 同步采样 SAR ADC 的演示板
- 电路显示了一个输入电流监视器,它控制 VOUT 将输入电流钳位到 500mA
- NCD57253GEVB:NCD57253GEVB - 评估板
- 使用 Semtech 的 LM2576 的参考设计
- 【训练营】【训练营】仿生坦克
- AP2132B固定版AP2132B 2A CMOS LDO稳压器典型应用












 京公网安备 11010802033920号
京公网安备 11010802033920号