3 系统的算法设计
该检测方法的难度在于噪声均方根值的计算和信号判决门限值的确定。
3.1 噪声均方根值的计算
为了确定噪声的均方根值,DSP处理器需要计算大量的数据,以使计算结果尽可能接近真实噪声值。通过计算噪声的1 024个点来计算噪声的平均值,噪声的采样点越多,计算出来的噪声平均值起伏越小,同时也越精确。设单个噪声值为A,噪声平均值为X,噪声均方根值为Y,则:


3.2 信号判决门限值的计算
信号判决门限值的计算也是信号检测最关键的部分,首先根据信噪比为3 dB,算出雷达信号大概是噪声信号的1.41倍。既要检测出有用的雷达信号,又要避免将噪声误判为信号,如果门限选得很高,则虚警概率很低,但接收机的灵敏度也会降低,这是不能接受的,通常情况下,每隔几十秒报告一次错误的信息是可以接受的,接收机后的信号分类处理器会将其滤除掉。同时实际上只通过单一门限判断雷达信号的效果无法令人满意,根据大量的试验数据确定了两级检测门限,即信号的第一检测门限定为1.3倍的噪声均方根值,信号的第二检测门限定为1.5倍的噪声均方根值,这样既利于DSP的快速计算处理,又省去了耗费很多时间的复杂傅里叶计算,而且倍数可根据信噪比的不同进行调整。设信号的第一检测门限为Z1,信号的第二检测门限为Zh,则:

4 雷达信号的FPGA检测方法
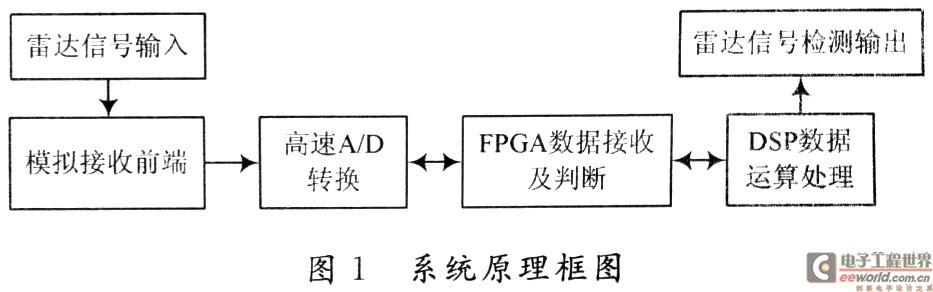
DSP处理器计算出雷达信号的判决门限值,FPGA芯片根据门限值从高速A/D转换器的转换结果中提取出雷达信号,检测方法有两种。
4.1 多样本检测方法
多样本检测方法即从N个连续样本中判断至少有L个样本必须超过门限,满足信号判决门限值的要求。
首先FPGA芯片存储了大量的采样数据,根据DSP处理器计算出的门限值,FPGA芯片不断检测A/D转换后的数据是否大于信号的第一检测门限Z1,如果满足要求,则判为有效信号开始,FPGA芯片对A/D转换的连续18个数据进行判断。在18个数据中,如果有7个数据都大于信号的第一检测门限Z1,则继续判断是否至少有3个数据大于信号的第二检测门限Zh,有则判断为检测到雷达信号,无则继续检测。实行双重门限检测是为了判断有用信号的开始和二次过滤噪声。
4.2 概率密度检测法
雷达信号检测的另一个方法是概率密度检测法,它根据150 ns需采样的18个数据,通过FPGA芯片不断计算连续18个数据点的输出和,并将结果除以18,与门限值(Zh)进行比较,计算和大于这一门限值,则判断为有信号,否则判断为无信号。
5 虚假信号的滤除
接收过程中会遇到幅度较大的大噪声,如果不做虚假信号的滤除,将有可能把它误判为一个有效信号。为了滤除此类噪声,对检测出的信号还要继续进行过滤处理,根据有效信号的前后时间段应对噪声(低电平)进行判断,如果有效信号的前后时间段检测为高电平,则将该检测信号判为大噪声。具体实现方法如下:FPGA芯片在检测到的信号前后各取6个A/D转换的数据,如果6个数据中有1个数据满足信号的第二检测门限Zh,则判断检测到的信号为虚假信号,需滤除。
6 结 语
试验证明上述FPGA的两种检测方法都可对信号进行有效检测,当只存在噪声时,接收机不产生虚假的信号;当输入单个信号时,接收机输出单个检测信号,不产生多余的虚假信号;当输入多个信号时,接收机则输出多个检测信号,有效实现了低信噪比情况下雷达信号的检测。
数字化的处理方法使得对各种信息的处理更具有灵活性、准确性和功能可扩展性,对数字化的信息进行存储、传输、处理也更加方便、快捷和可靠。所以基于数字化技术的信息处理是必然的发展趋势,具有广阔的应用前景。

 汽车电子的革新与FPGA-24页
汽车电子的革新与FPGA-24页 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用










 京公网安备 11010802033920号
京公网安备 11010802033920号