LED 的排列方式及LED 光源的规范决定着基本的驱动器要求。
LED驱动器的主要功能就是在一定的工作条件范围下限制流过LED的电流,而无论输入及输出电压如何变化。最常用的是采用变压器来进行电气隔离。下文论述了LED照明设计需要考虑的调光因素。
正是因为调光的要求所以驱动LED 面临着不少挑战,如正向电压会随着温度、电流的变化而变化,而不同个体、不同批次、不同供应商的LED 正向电压也会有差异;另外,LED 的“色点”也会随着电流及温度的变化而漂移。
下文 LED采用多个串联的方式,供电电源为12V电,所以使用了一级升压电路。
系统组成
LED调光系统组成框图如图1.1所示。

图1 LED调光系统组成框图
单元硬件电路的设计
1、基于MAX1771的升压(Boost)电路
MAX1771是美信公司的电源管理芯片,可以做为升压电路使用,电路结构为Boost电路,如下图2.1所示。当电压输入电压的范围是5-12V,输出根据 的调节范围是24-36V。引脚1输出PWM来控制场效应管IRF3205的导通与截止。 引脚3是电压反馈端,内置1.25V的稳压源。当输入到3脚的电压高于或低于1.25V时,芯片会自动调节PWM占空比的减小或增大,以得到稳定的输出。

图2.1 基于MAX1771的Boost电路原理图
2、LED驱动电路的设计
LED驱动电路原理图如图2.2所示。由于Buck电路的驱动比较复杂,故使用如下的电路, 使在场效应管关断后让LED的负极电压升高,使得LED关闭。当场效应管导通时,LED的负极电压被拉低,使得LED发光。PWM调节方式使得驱动电路更简单,降低了制造成本,并可以获得较精确的亮度步进调节。

图2.2 LED驱动电路原理图
软件设计
采用STC89C52单片机输出频次为230Hz的PWM来驱动场效应管IRF3205的开断,其中用独立键盘来实现PWM占空比1%-99%连续可调,步进值为 1%。同时使用液晶YJDC-1对LED的亮度即PWM的占空比进行显示,形成了良好的人机界面。软件流程图如图3.1所示。
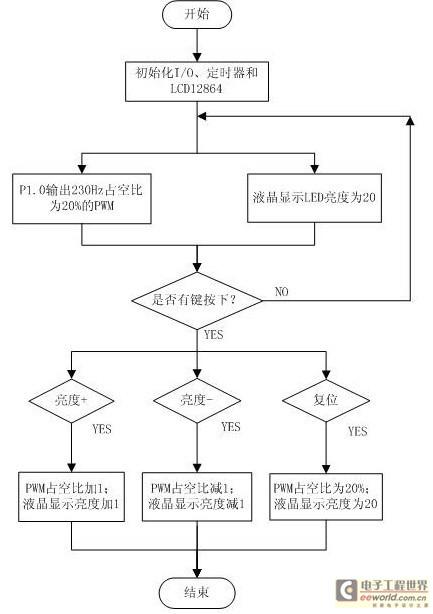
图3.1 软件流程图
电路原理图及印制板图

关键字:STC89C52 单片机 LED调光
编辑:探路者 引用地址:基于STC89C52单片机的LED调光系统电路设计
推荐阅读最新更新时间:2023-10-12 22:29
单片机C语言编程与&或|头文件常见
一、常见问题
1、头文件reg51.h和reg52.h其实是一样的,大家两个都可以用。
2、main()前面的void可加可不加,反正都是无返回值函数。
3、不是每一个程序都要用到死循环while(1),例如点亮一颗LED小灯就不用,只要执行一次就一直是高电平了不用循环。
4、位操作和字节操作都能用来控制I/O口输出电平,位操作需要实现声明sbit,而字节操作则不用。
5、延时程序有两种a:循环延时;b:定时器精确延时
6、如果定义的变量没有置初值,那么默认初值就是零。
7、定义数组时(如:number ={1,2,3,4,5,6, };)则结束时
[单片机]

采用MCU的简化脉搏血氧仪集成设计
脉搏血氧仪是一种用于监视病人血氧饱和度的非浸入式仪器,它正受益于从昂贵的分立元件解决方案转向更高集成度的设计。但是,集成意味着需要就采用哪种处理架构做出艰难抉择。
脉搏血氧仪依赖于脉搏强度或脉动流来进行测量,因此被监视的区域内必须具有良好的血流,而任何阻滞都可能造成测量误差。脉搏血氧仪还能连带计算出脉搏频率,因此大多数脉搏血氧仪都具有这项功能。典型脉搏血氧仪的测量范围介于70%-100%的饱和度之间,低于70%时读数便不可靠。
脉搏血氧仪的工作原理基于动脉搏动期间光吸收量的变化。分别位于可见红光光谱(660纳米)和红外光谱(940纳米)的两个光源交替照射被测试区(一般为指尖或耳垂)。在这些脉动期间
[医疗电子]
第15节:十进制与十六进制
从业十年,教你单片机入门 第15讲:
十六进制是二进制的缩写形式,而C语言程序里只用了十进制和十六进制这两种书写格式。它们各有什么应用特点?十六进制方便人理解机器,通常应用在配置寄存器,底层通讯驱动,底层IO口驱动,以及数据的移位,转换和合并等场合。而十进制则方便人理解值的大小,在应用层经常用。总之,进制只是数据的表现形式而已。
十进制与十六进制如何相互转换?其实很多教科书上有介绍它们之间如何通过手工计算进行转换的方法。但是实际应用中,我从来没有用过这种手工计算方法,我用的方法是最简单直接的,就是借助电脑自带的计算器进行转换即可。现在把这种方法介绍给大家。
第一步:点击电脑左下角 开始 菜单,在下拉菜单中把鼠标移动到
[单片机]
用单片机中断来扫描键盘的程序
/* 程序效果:用51单片机的中断来扫描键盘,按下按键,蜂鸣器响,数码管有相应的键值 显示,按下E键继电器关,按下C键继电器开。 这与上一程序的功能相同,比上一程序简洁 但理解相对困难些。 开发设计:http://www.51hei.com/ */
#include reg52.h //头文件 #include intrins.h #define uchar unsigned char //宏定义 #define uint unsigned int sbit jdq=P3^5; //位声明,驱动继电器管脚 sbit fmq=P3^4; //位声明,驱动蜂鸣器管脚 code uchar table
[单片机]
基于PIC单片机的步进电机自适应控制技术研究
1、引言 步进电机是一种离散运动的装置,它和现代数字控制技术有着紧密的本质的联系。步进电机亦是一种将电脉冲转化为角位移或直线位移的执行机构,当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(又称之为步进角),为此可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过脉冲频率来控制步进电机的转动速度和加速度,从而达到调速的目的。从以上所述可知,步进电机是可以用脉冲信号直接进行定位控制,由于其具有一定的精度,且控制线路简单,使用方便、可靠;因此它广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备(扫描仪、磁盘驱动器、打印机)、照相机(包括光学照相机与数码照相机),投
[单片机]
一种高精度超声波测距系统研究
0 引言 随着科学技术的快速发展,超声波在测距仪中的应用越来越广。但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,超声波测距还是一个正在蓬勃发展而又有无限前景的技术及产业领域。为了能顺利地完成汽车的停放,应用测距电路能更准确、即时地得到汽车与障碍物的距离。 智能机器人进入人们的家庭不再是科幻片里面的情节,现在已经有很多机器人开始普及,如智能清洁机器人、智能防盗机器人等。而这些机器人是需要感觉周围的环境来做出判断的,测距系统就能发挥很大的作用。因此,设计高稳定性、高精度的超声波测距仪就显得特别重要。 1 超声波测距原理 和蝙蝠探测障碍物的方法一样,用超声波测距时,先由超声波测距仪向前方发射超声波,超声
[单片机]
STC89C52单片机的UART串行通信设计
对于单片机来说,通信则与传感器、存储芯片、外围控制芯片等技术紧密结合,成为整个单片机系统的“神经中枢”。 1、初步认识 一位一位的发送出去的,要发送 8 次才能发送完一个字节。 STC89C52有两个引脚是专门用来做 UART串行通信的,一个是 P3.0一个是 P3.1,它们还分别有另外的名字叫做 RXD和TXD,由它们组成的通信接口就叫做串行接口,简称串口。 波特率:发送二进制数据位的速率,习惯上用 baud 表示;即我们发送一位二进制数据的持续时间=1/baud。 通信过程:在UART 通信的时候,一个字节是 8 位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位 0 表示起始位,然后发送 8
[单片机]






 西电-印刷电路板(PCB)设计指南_1-99
西电-印刷电路板(PCB)设计指南_1-99 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号