 总线
总线
总线是将信息以一个或多个源部件传送到一个或多个目的部件的一组传输线。通俗的说,就是多个部件间的公共连线,用于在各个部件之间传输信息。人们常常以MHz表示的速度来描述总线频率。 [全文]
SPI(serial peripheral interface,串行外围设备接口)总线技术是Motorola公司推出的一种同步串行接口。它用于CPU CPU也称为中央处理器,是电子计算机的主要设备之一。其功能主要是解释计算机指令以及处理计算机软件中的数据。所谓的计算机的可编程性主要是指对CPU的编程。CPU是计算机中的核心配件,只有火柴盒那么大,几十张纸那么厚,但它却是一台计算机的运算核心和控制核心。计算机中所有操作都由CPU负责读取指令,对指令译码并执行指令的核心部件。CPU、内部存储器和输入/输出设备是电子计算机的三大核心部件。 [全文] MCU Microcontroller(微控制器)又可简称MCU 或μ C,也有人称为单芯片微控制器(Single Chip Microcontroller),将ROM、RAM、 CPU、I/O 集合在同一个芯片中,为不同的应用场合做不同组合控制.微控制器在经过这几年不断地研究,发展,历经4 位,8 位, 到现在的16 位及32 位,甚至64 位.经过20多年的发展,其成本越来越低,而性能越来越强大,这使其应用已经无处不在,遍及各个领域。 [全文] 数据线就是连接移动设备和电脑达到传送铃声、图片等数字类信息文件的通路工具。现在随着电子行业日新月异的发展,数据线已经成为了我们生活中不可获缺的部分。 [全文]CPU
MCU
数据线

图1 典型系统框图
2.SPI总线的主要特点
· 全双工;
· 可以当作主机或从机工作;
· 提供频率可编程时钟;
· 发送结束中断标志;
· 写冲突保护;
.总线竞争保护等。
3.SPI总线工作方式
SPI总线有四种工作方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):

图2 SPI0和SPI3方式(实线表示)
四种工作方式时序分别为:

图3 四种工作方式时序
时序详解:
CPOL:时钟极性选择,为0时SPI总线空闲为低电平,为1时SPI总线空闲为高电平
CPHA:时钟相位选择,为0时在SCK第一个跳变沿采样,为1时在SCK第二个跳变沿采样
工作方式1:
当CPHA=0、CPOL=0时SPI总线工作在方式1。MISO引脚上的数据在第一个SPSCK沿跳变之前已经上线了,而为了保证正确传输,MOSI引脚的MSB位必须与SPSCK的第一个边沿同步,在SPI传输过程中,首先将数据上线,然后在同步时钟信号的上升沿时,SPI的接收方捕捉位信号,在时钟信号的一个周期结束时(下降沿),下一位数据信号上线,再重复上述过程,直到一个字节的8位信号传输结束。
工作方式2:
当CPHA=0、CPOL=1时SPI总线工作在方式2。与前者唯一不同之处只是在同步时钟信号的下降沿时捕捉位信号,上升沿时下一位数据上线。
工作方式3:
当CPHA=1、CPOL=0时SPI总线工作在方式3。MISO引脚和MOSI引脚上的数据的MSB位必须与SPSCK的第一个边沿同步,在SPI传输过程中,在同步时钟信号周期开始时(上升沿)数据上线,然后在同步时钟信号的下降沿时,SPI的接收方捕捉位信号,在时钟信号的一个周期结束时(上升沿),下一位数据信号上线,再重复上述过程,直到一个字节的8位信号传输结束。
工作方式4:
当CPHA=1、CPOL=1时SPI总线工作在方式4。与前者唯一不同之处只是在同步时钟信号的上升沿时捕捉位信号,下降沿时下一位数据上线。
4.SPI总线常见错误
4.1 SPR设定错误
在从器件时钟频率小于主器件时钟频率时,如果SCK的速率设得太快,将导致接收到的数据不正确(SPI接口本身难以判断收到的数据是否正确,要在软件中处理)。
整个系统的速度受三个因素影响:主器件时钟CLK主、从器件时钟CLK从和同步串行时钟SCK,其中SCK是对CLK主的分频,CLK从和CLK主是异步的。要使SCK无差错无遗漏地被从器件所检测到,从器件的时钟CLK从必须要足够快。下面以SCK设置为CLK主的4分频的波形为例,分析同步串行时钟、主时钟和从时钟之间的关系。

图4主从时钟和SCK的关系
如图4所示,当T
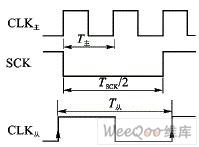
图5主从时钟和SCK的关系
根据以上的分析,SPR和主从时钟比的关系如表1所列。
表1 SPR的设置和主从时钟周期比值之间的关系

在发送数据之前按照表1对SPR进行设置,SPR设定错误可以完全避免。
4.2 模式错误(MODF)
模式错误表示的是主从模式选择的设置和引脚SS的连接不一致。
器件工作在主模式的时候(MSTR=1),它的片选信号SS引脚必须接高电平。在发送数据的过程中,如果它的SS从高电平跳至低电平,在SS的下降沿,SPI模块将检测到模式错误,对MODF位置1,强制器件从主模式转入从模式(即令MSTR=0),清空内部计数器 计数器是一种具有多种测量功能、多种用途的电子计数器。它可以测量频率、周期、时间间隔、频率比、累加计数、 计时等;配上相应的插件,还可以测量相位、电压等。一般我们把凡具有测频和测周两种以上功能的计数器都归类为通用计数器。 [全文]计数器
对从模式(MSTR=0),在没有数据传送的时候,SS高电平表示从器件未被选中,从器件不工作,MISO输出高阻;在数据传输过程中,片选信号SS必须接低电平,且SS不允许跳变。如果SS从低电平跳到高电平,在SS的上跳沿,SPI模块也将检测到模式错误,清空内部计数器counter,并结束正在进行的数据传输。直到SS恢复为低电平,重新使SPEN=1时,才重新开始工作,如图6(b)所示。

图6模式错误的检测
4.3 溢出错误(OVR)
溢出错误表示连续传输多个数据时,后一个数据覆盖了前一个数据而产生的错误。
状态标志SPIF表示的是数据传输正在进行中,它对数据的传输有较大的影响。主器件的SPIF有效由数据寄存器的空标志SPTE=0产生,而从器件的SPIF有效则只能由收到的第一个SCK的跳变产生,且又由于从器件的SPIF和主器件发出的SCK是异步的,因此从器件的传输标志SPIF从相对于主器件的传输标志SPIF主有一定的滞后。如图7所示,在主器件连续发送两个数据的时候将有可能导致从器件的传输标志和主器件下一个数据的传输标志相重叠(图7中虚线和阴影部分),第一个收到的数据必然被覆盖,第二个数据的收/发也必然出错,产生溢出错误。
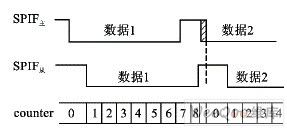
图7溢出错误
通过对从器件的波形分析发现,counter=8后的第一个时钟周期,数据最后一位的传输已经完成。在数据已经收/发完毕的情况下,counter=8状态的长短对数据的正确性没有影响,因此可以缩短counter=8的状态,以避免前一个SPIF和后一个SPIF相重叠。这样,从硬件上避免了这一阶段的溢出错误。
但是,如果从器件工作速度不够快或者软件正在处理其他事情,在SPI接口接收到的数据尚未被读取的情况下,又接收到一个新的数据,溢出错误还是会发生的。此时,SPI接口保护前一个数据不被覆盖,舍弃新收到的数据,置溢出标志OVR=1;另外发出中断信号(如果该中断允许),通知从器件及时读取数据。
4.4 偏移错误(OFST)
SPI接口一般要求从器件先工作,然后主器件才开始发送数据。有时在主器件往外发送数据的过程中,从器件才开始工作,或者SCK受到外界干扰,从器件未能准确地接收到8个SCK。如图8所示,从器件接收到的8个SCK其实是属于主器件发送相邻的两个数据的SCK主。这时,主器件的SPIF和从器件的SPIF会发生重叠,数据发生了错位,从器件如果不对此进行纠正的话,数据的接收/发送便一直地错下去。

图8偏移错误
在一个数据的传输过程中,SPR是不允许改变的,即SCK是均匀的,而从图5可以看出,从器件接收到的8个SCK并不均匀,它们是分别属于两个数据的,因此可以计算SCK的占空时间来判断是否发生了偏移错误。经分析,正常时候SCK=1时的时钟周期数n的取值满足如下关系:

但由于主从时钟之间是异步的,并且经过了取整,所以正常时候SCK=1时的时钟周期计数值COUNT应满足:

比如在图5中,COUNT的最大值COUNT(max)=2或者1,都可认为是正常的。但当出现COUNT(max)=8时,可以判定出现了偏移错误。在实际设计中,先记录下第一个COUNT(max)的值,如果后面又出现与记录值相差1以上的COUNT(max)出现,可知有偏移错误OFST发生。SPI接口在“不均匀”的地方令SPIF=1,然后准备等待下一个数据的第一个SCK。其中COUNT的位数固定为8位,为了避免溢出时重新从00H开始计数,当计数达到ffH时停止计数。
4.5 其他错误
设定不当,或者受到外界干扰,数据传输难免会发生错误,或者有时软件对错误的种类判断不清,必须要有一种方法强制SPI接口从错误状态中恢复过来。在SPI不工作,即SPEN=0的时候,清除SPI模块内部几乎所有的状态(专用寄存器除外)。如果软件在接收数据的时候,能够发现数据有错误,无论是什么错误,都可以强制停止SPI的工作,重新进行数据传输。例如,在偏移错误(OFST)中,如果SPR2、SPR1和SPR0的设置适当,也可以使SCK显得比较“均匀”。SPI接口硬件本身不可能检测到有错误,若用户软件能够发现错误,这时就可以强制停止SPI的传输工作,这样就可以避免错误一直持续下去。
在应用中,如果对数据的正确性要求较高,除了要在软件上满足SPI接口的时序要求外,还需要在软件上作适当的处理。
5.设计SPI总线控制器
目前的项目中使用了SPI总线接口的FLASH存储器 存储器是用来存储程序和数据的部件,有了存储器,计算机才有记忆功能,才能保证正常工作。它根据控制器指定的位置存进和取出信息。 [全文] 晶振:即所谓石英晶体谐振器和石英晶体时钟振荡器的统称。不过由于在消费类电子产品中,谐振器用的更多,所以一般的概念中把晶振就等同于谐振器理解了。后者就是通常所指钟振。 [全文] 现场可编程逻辑门阵列(FPGA, Field Programmable Gate Array),是一个含有可编辑元件的半导体设备,可供使用者现场程式化的逻辑门阵列元件。FPGA是在PAL、GAL、CPLD等可编辑器件的基础上进一步发展的产物。 [全文]存储器
晶振
FPGA
首先接触到的是SPI的SCK时钟频率问题。FPGA的频率是48M,未使用PLL pll是锁相环(Phase-Locked Loop)的英文简称,用来使外部的输入信号与内部的振荡信号同步。pll是用于振荡器中的反馈控制电路。 [全文]PLL
上一篇:解析数字电视技术及其应用
下一篇:物联网实现道路科学绿色地照明
推荐阅读最新更新时间:2024-03-30 21:46

 嵌入式系统软硬件协同设计教程:基于Xilinx Zynq-7000 (符意德)
嵌入式系统软硬件协同设计教程:基于Xilinx Zynq-7000 (符意德) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用





- Vicor 更好的供电方式提升无人机飞行时间飞行半径及有效载荷
- 【TI 嵌入式研讨会集锦】小站添加了很多新内容,欢迎提货!
- TI C2000精品课暑期伴你行 学习好礼送不停
- 我与BeagleBone 有个约会!
- 有奖直播:当代物联网智能天线设计趋势
- Littelfuse 碳化硅(SiC) MOSFET和肖特基二极管产品介绍及相关应用
- 【免费租用】Xilinx Spartan-6 FPGA 嵌入式套件!
- 考眼力:高速数字设计的秘籍 藏在哪里? 走近Keysight PATHWAVE,提升工作效率
- 美信基础模拟IC APP下载 助力您创新模拟设计!评论、抢楼全有礼!
- 抢楼有奖:免费获得元器件样品本~~




 京公网安备 11010802033920号
京公网安备 11010802033920号