混合式步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB)。反应式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或1.5度;永磁式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
混合式(即HB型)步进电机有两相、三相、五相式,转子因与相数无关,而采用相同转子,本文以两相HB型混合式步进电机为例加以说明。HB型的名称由其转子结构得来,其转子是PM型永磁步进电机与VR型变磁阻反应式步进电机转子的复合体,故而也称此类电机为为混合式步进电机。
本文主要介绍HB型混合式步进电机的结构和工作原理,具体的跟随小编来了解一下。
HB型混合式步进电机的结构
HB型混合式步进电机结构为两个导磁圆盘中间夹着一个永磁圆柱体轴向串在一起,两个导磁圆盘的外圆齿节距相同,与前述的VR型可变磁阻反应式步进电机转子结构相同,其两个圆盘的齿错开1/2齿距安装,转子圆柱永磁体轴向充磁一端为N极,另一端为S极。
此种电机转子与前面叙述的PM型永磁步进电机转子从结构来看,PM型转子N极与S极分布于转子外表面,要提高分辨率,就要提高极对数,通常20mm的直径,转子可配置24极,如再增加极数,会增大漏磁通,降低电磁转矩;而HB型转子N极与S极分布在两个不同的软磁圆盘上,因此可以增加转子极数,从而提高分辨率,20mm的直径可配置100个极,并且磁极磁化为轴向,N极与S极在装配后两极磁化,所以充磁简单。
与转子齿对应的定子极,主极内径有与转子齿节距相同的小齿,与转子齿的磁通在气隙处相互作用,能产生电磁转矩。此种转子的步进电机在近期被广泛应用。
此种结构源自于1992年美国GE通用电气公司的Karl Feiertag,取得美国专利的发电机。与现在的两相HB型步进电机结构相同,当初是作为低速同步电机使用,其后,美国的Superior Electric公司和Sigma Instruments 公司开发出步距角为1.8°,转子齿数为50的两相HB型步进电机。
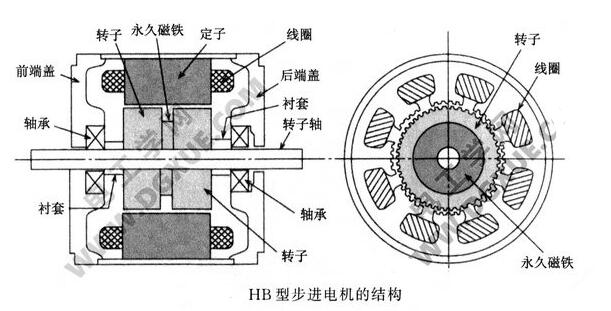
如下图所示为定子为两相绕组,转子齿数50,1.8°的HB型混合式步进电机的剖视图。为加大输出转矩,尽量加长了转子软磁磁极的轴向长度。
下图为HB型步进电机各结构示意图:
定子为8个磁极(放置绕组的主磁极)均匀分布,此8个磁极的内圆分布有与转子齿距相同的齿,与转子齿分布在气隙两边。转子齿多于定子齿。
线圈用绕线机直接绕制在树脂注塑成型的槽绝缘骨架上,线圈绕好后安装在磁极上。前、后端盖采用铸铝材料,采用机械加工方法保证轴承座与安装止口的同心度。通常HB型混合式步进电机的气隙为0.05~0.1mm,由于气隙小,所以控制各组件的加工精度相当重要。
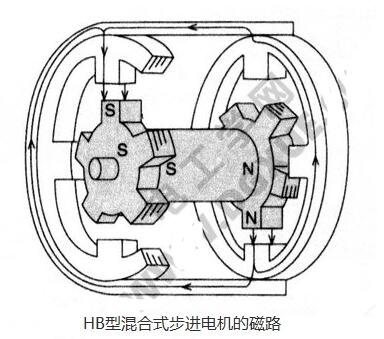
转子装入定子和前后端盖,确保气隙均匀,永磁体的磁化方向为轴向,N、S极在两端磁化,产生的磁力线方向如箭头所示,为容易理解,简化实际磁路为定子为4个主极与5个转子齿(如下图所示),此处省略了定子绕组。
由于转子的永久磁铁的磁通在定子中变成交链磁通,当定子线圈流过电流时,根据弗莱明左手定则(I为电流,B为磁通密度,L为线圈轴向有效长度)产生电磁转矩。2个导磁体夹着1个永磁体,转子的齿位置互相相差1/2齿节距。转子的磁通从N极出发,经过气隙最小处(定转子齿相对的地方)到定子磁路,再返回转子的S极,磁路如箭头所示。
上图左侧的转子上部,右侧的转子下部产生吸引力,轴两侧产生力矩(此力是不平衡电磁力),转子的旋转受定子激磁线圈切换产生旋转力。轴承的间隙会很容易产生振动。实际上定子主极为8个极,转子齿数为偶数,目的是消除此不平衡电磁力。实际上与2个转子齿部相对的定子,在轴向上并非是分开成两个,而是采用硅钢片叠压而成一体。
HB型混合式步进电机工作原理
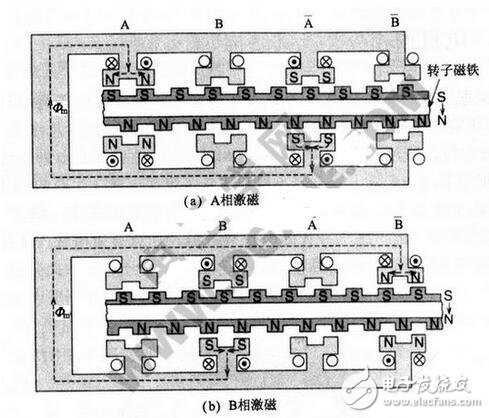
下图描述了两相HB型步进电机的工作原理。永久磁铁使转子产生N极和S极,由吸引力和排斥力产生电磁转矩,两相绕组假设为A相、B相、“杠A”相、“杠B”相。例如,A相和“杠A”相接通电源,根据右手螺旋法则产生相反的磁场。同样,B相与“杠B”相也是如此。图中,实线箭头表示转子磁通,虚线表示为其磁路磁通Фm。从转子磁铁的轴向图看,转子N极通过气隙向下进入定子,通过定子磁极轴向穿过铁心到达上面的定子磁极后,穿过气隙回到转子S极。下图充分说明了HB型混合式步进电机的结构和工作原理。
转子磁路中间为永久磁铁,下侧为N极,上侧为S极。磁铁的厚度方向磁通由上向下。开始状态(a)为A相激磁,则“杠A”相极性相反,因此停在图示位置,转子与A相和“杠A”相的各一半对应,形成交链磁通Фm,如图中虚线所示。
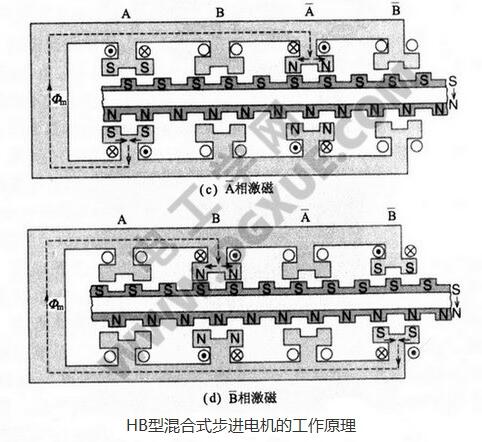
下一步,激磁相转换到状态(b),断开A相激磁电流,接通B相激磁电流,则转子向右移动1/4转子齿距,运行到图(b)的位置。
再一步,激磁相转换到状态(c),断开B相激磁,接通“杠A”相激磁,则转子从状态(b)向右移动一步(1/4齿距)运行到状态(c)的位置。同样,激磁相换到状态(d),断开“杠A”相激磁,接通“杠B”相激磁,则转子从状态(c)向右移动一步(1/4齿距)运行到状态(d)的位置。再一步,就返回状态(a),依次不断循环。
上一篇:PROFIBUS现场总线技术及发展趋势分析
下一篇:G6DN系列典型应用:PLC输出靠继电器触点控制
推荐阅读最新更新时间:2024-03-30 22:01

 步进电机驱动控制技术及其应用设计研究
步进电机驱动控制技术及其应用设计研究 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}